



1.功能
通常情况下一般使用直角坐标系(X、Y、Z),但工件上的点也可以用极坐标定义。如果一个工件或部件,当其尺寸以到一个固定点(极点)的半径和角度来设定时,往往就使用极坐标系。
极坐标同样以所使用的平面G17~G19为基准平面,也可以设定垂直于该平面的第3根轴的坐标值,此时可作为柱面坐标系编程三维的坐标尺寸。
2.极点定义和指令格式
G110:极点定义,相对于上次编程的设定位置(在平面中,比如G17)。
G111:极点定义,相对于当前工件坐标系的零点(在平面中,比如G17)。
G112:极点定义,相对于最后有效的极点,平面不变。
定义极坐标:
G110/G111/G112 X_Y_Z_
G110/G111/G112 AP_RP_
带极坐标的移动指令:
G0/G1G2/G3 AP=_RP=_
极坐标半径RP=_:极坐标半径定义该点到极点的距离。该值一直保存,只有当极点发生变化或平面更改后才需要重新编程。
极坐标角度AP=_:极角是指与所在平面中的横坐标轴之间的夹角(比如G17中X轴)。该角度可以是正角,也可以是负角。该值一直保存,只有当极点发生变化或平面更改后才需重新编程。图5-23为在不同平面中正方向的极坐标半径和极角。(https://www.xing528.com)
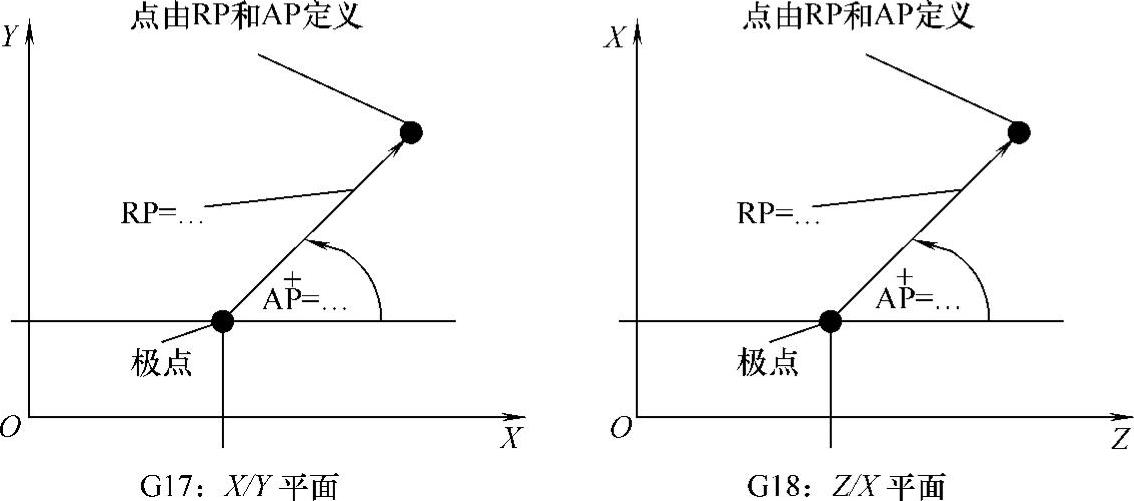
图5-23 在不同平面中正方向的极坐标半径和极角
3.说明
1)当一个极点已经存在时,极点也可以用极坐标定义。
2)如果没有定义极点,则当前工件坐标系的零点就作为极点使用。
4.编程举例
N10 G17 ;X/Y平面
N20 G111 X12 Y36 ;在当前工件坐标系中的极坐标
…
N90 G112 AP=45 RP=26.8 ;新的极点,相对于上一个极点,作为一个极坐标
N100 G0 AP=30 RP=38 ;极坐标
N110…AP=26.3 RP=9.36 Z4 ;极坐标和Z轴(=柱面坐标)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。