



首先打开随书光盘中的项目“PID控制”,然后打开PLCSIM。将所有的块下载到仿真PLC,将仿真PLC切换到RUN-P模式。
单击Windows 7左下角的“开始”按钮,执行菜单命令“开始”→“所有程序”→“Siemens Automation”→“SIMATIC”→“STEP 7”→“PID Control Parameter Assignment”(PID控制参数赋值),打开“PID控制”视图(见图8-17)。单击工具栏上的  按钮,用单选框选中“打开”对话框中的“在线”。
按钮,用单选框选中“打开”对话框中的“在线”。
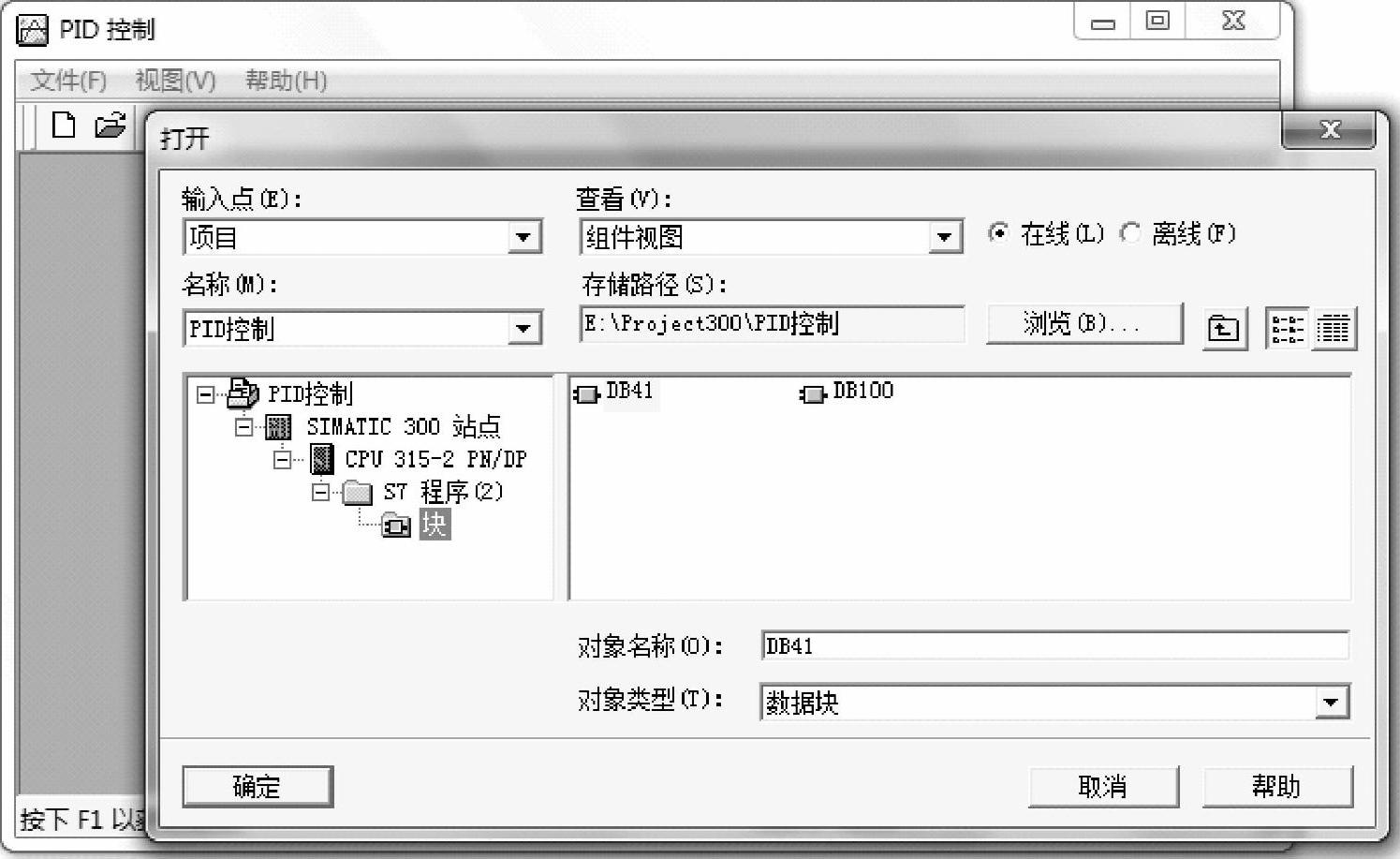
图8-17 打开DB41
单击“浏览”按钮,打开已下载到仿真PLC的项目“PID控制”,选中该项目中FB41的背景数据块DB41。单击“确定”按钮,出现图8-18所示的参数赋值对话框,其中的PID控制器的参数是在程序中设置的。可以在程序运行时用这个对话框来修改PID控制器的参数。
单击工具栏上的曲线记录按钮  ,打开“曲线记录”对话框(见图8-19上面的图),此时还没有图中的曲线。
,打开“曲线记录”对话框(见图8-19上面的图),此时还没有图中的曲线。
单击“设置”按钮,打开“设置”对话框(见图8-19下面的图)。将曲线3由“操纵变量”(PID控制器的输出变量)改为“无”,只显示额定值(即设定值)和实际值(即被控量)的曲线。可以用“改变颜色”按钮设置各曲线的颜色,用“Y轴限制”下面的文本框,将各曲线的下限值设置为0,用“时间轴长度”文本框修改曲线的时间轴长度。单击“确定”按钮,返回“曲线记录”对话框。
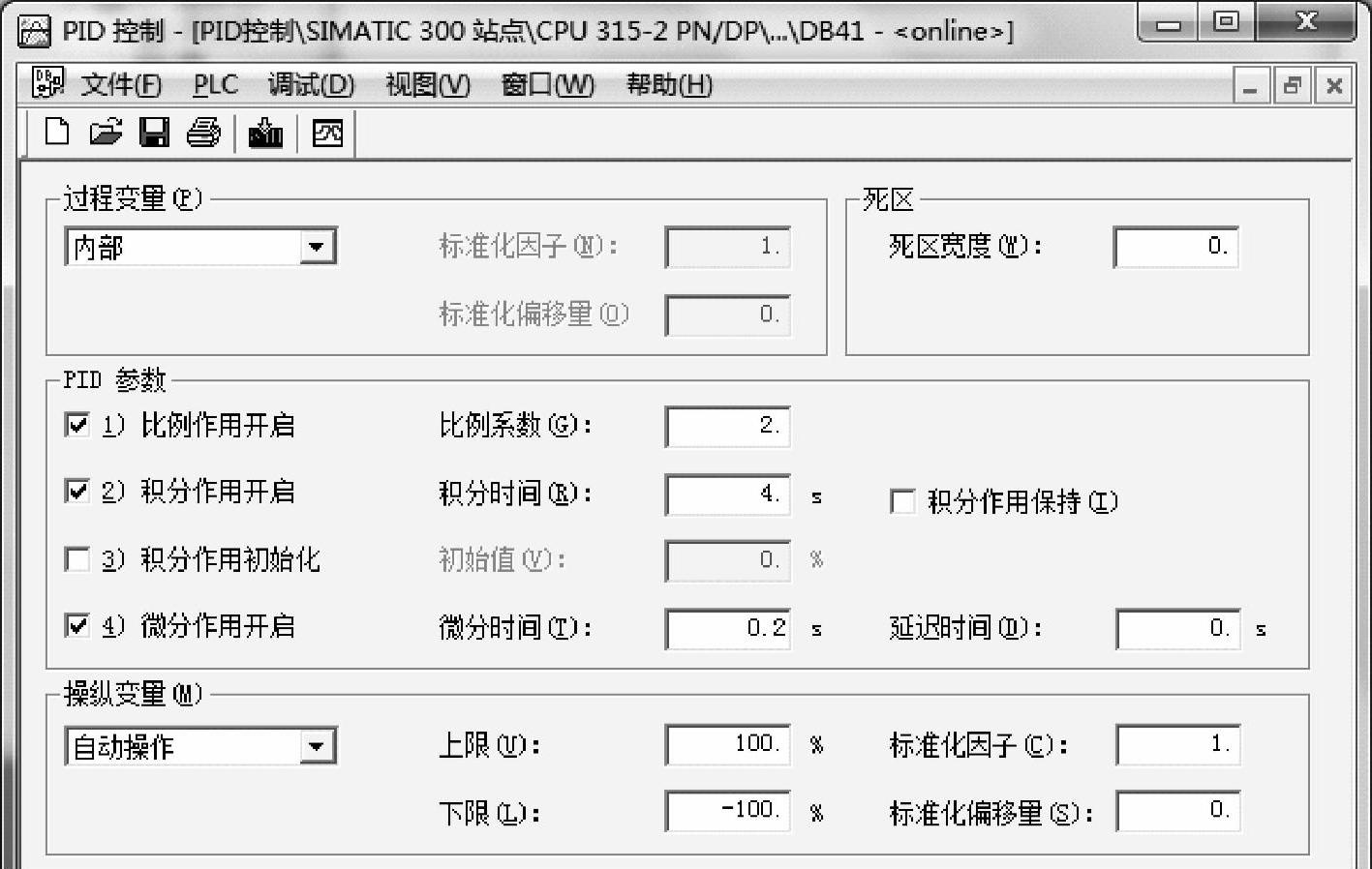
图8-18 PID控制参数赋值对话框
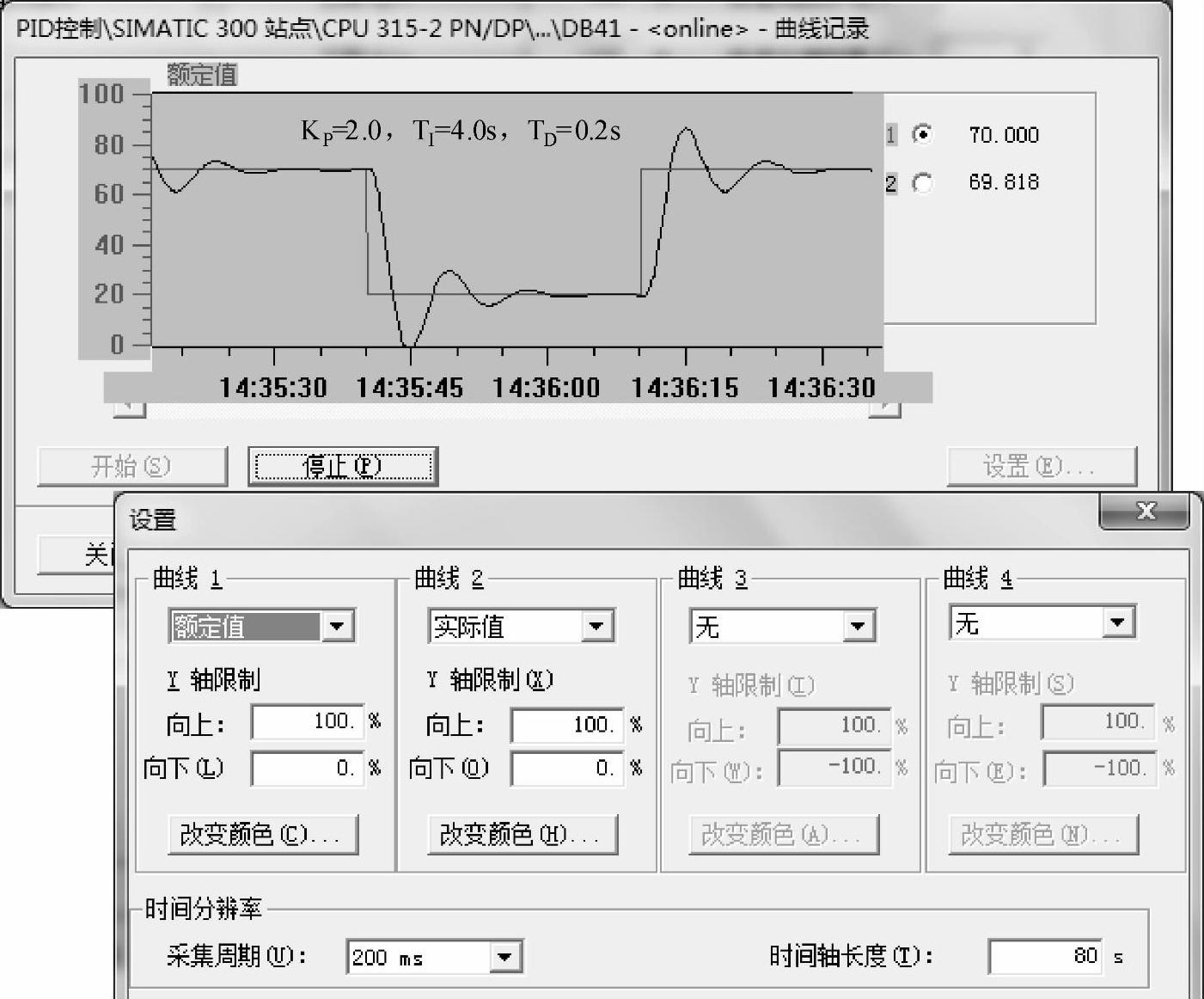
图8-19 “曲线记录”对话框与曲线记录参数设置对话框
可以用曲线记录对话框右边的单选框设置Y轴显示哪一条曲线的坐标值。单击“开始”按钮,开始显示设置的变量的曲线。图中的方波是设定值(即额定值)曲线,由于OB1中程序的作用,方波设定值在20%~70%之间阶跃变化,深色曲线是被控量(即实际值)曲线。单击“停止”按钮,停止动态刷新实时曲线。图中的KP等参数值是作者添加的。
图8-19中的被控量曲线的超调量过大,有多次震荡。用图8-18中的参数赋值对话框将积分时间由4s改为8s,单击工具栏上的下载按钮  ,将修改后的参数下载到仿真PLC。与图8-19中积分时间为4s的曲线相比,增大积分时间(减弱积分作用)后,图8-20中被控量曲线的超调量和震荡次数明显减小。
,将修改后的参数下载到仿真PLC。与图8-19中积分时间为4s的曲线相比,增大积分时间(减弱积分作用)后,图8-20中被控量曲线的超调量和震荡次数明显减小。
将图8-20中的积分时间还原为4s,微分时间由0.2s增大为1s。与图8-19中的曲线相比,适当增大微分时间后,图8-21中响应曲线的超调量和震荡次数明显减小。
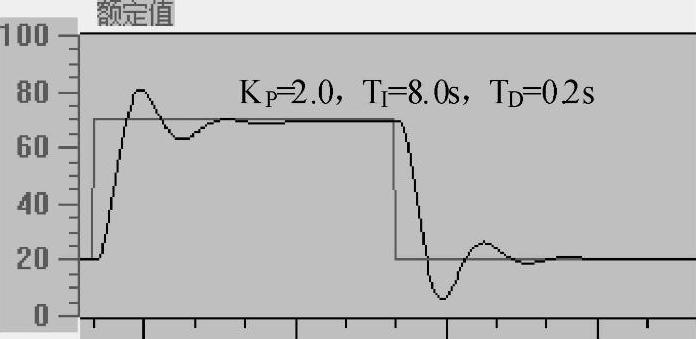
图8-20 PID控制阶跃响应曲线
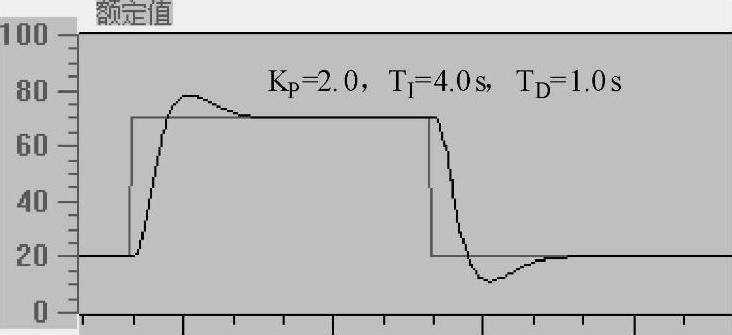
图8-21 PID控制阶跃响应曲线(https://www.xing528.com)
微分时间也不是越大越好,保持图8-21中的增益和积分时间不变,微分时间增大到8s时(见图8-22),与图8-21相比,超调量反而增大,曲线也变得很迟缓。由此可见微分时间需要恰到好处,才能发挥它的正面作用。
图8-23和图8-24的微分时间均为0(即采用PI控制),积分时间均为6s,比例增益分别为3.0和0.7。减小增益后,同时减弱了比例作用和积分作用。可以看出,减小增益能显著降低超调量和减小振荡次数,但是第一次到达稳态值的上升时间明显增大。
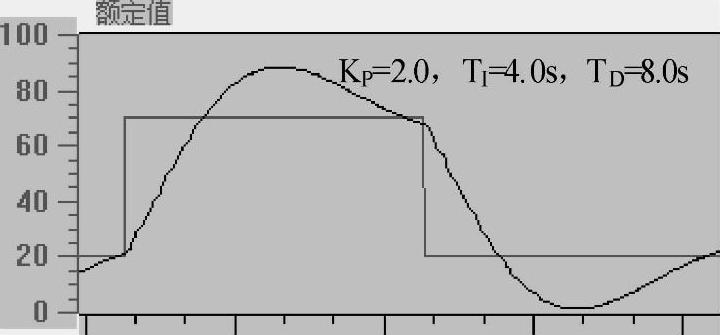
图8-22 PID控制阶跃响应曲线
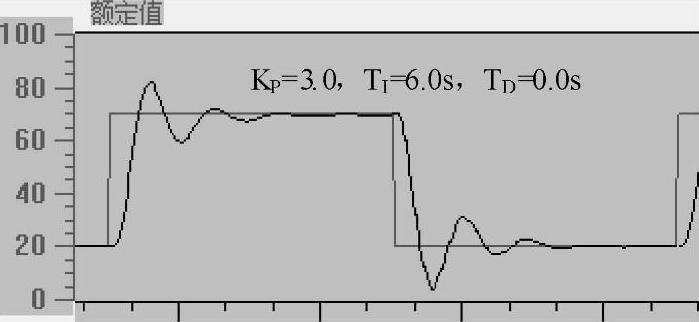
图8-23 PI控制阶跃响应曲线
将增益增大到2.0,减小了上升时间,但是超调量增大到16%。将积分时间增大到20 s,超调量明显减小(见图8-25)。但是因为积分作用太弱,消除误差的速度太慢。为了加快消除误差的速度,将积分时间减小到6s,超调量为14%。为了减小超调量,引入了微分作用。反复调节微分时间,1s时效果较好,超调量很小(见图8-26),上升时间和消除误差的速度也比较理想。
从上面的例子可以看出,为了兼顾超调量、上升时间和消除误差的速度这些指标,有时需要多次反复地调节控制器的3个参数,直到最终获得较好的控制效果。
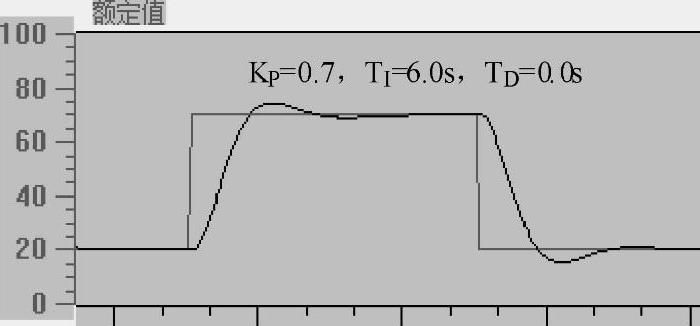
图8-24 PI控制阶跃响应曲线
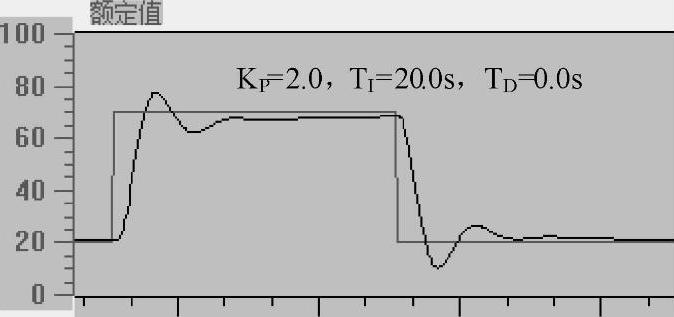
图8-25 PI控制阶跃响应曲线
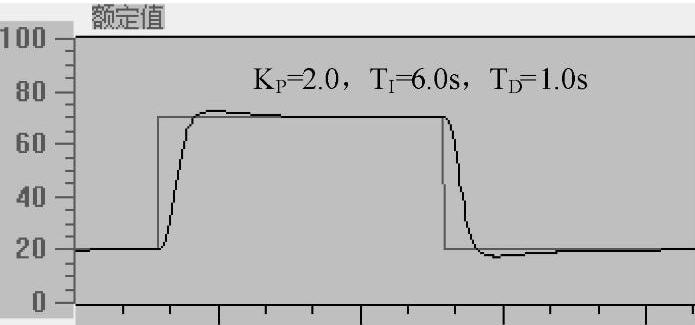
图8-26 PID控制阶跃响应曲线
读者可以修改OB100中FB100(被控对象)的参数,下载到仿真PLC后,调整PID控制器的参数,直到得到较好的响应曲线,即超调量较小,过渡过程时间较短。
在PID的参数固定不变的情况下,改变OB35的循环执行周期(即PID控制器的采样时间)和FB41、FB100中的参数CYCLE(三者应相同),观察采样时间对系统性能的影响,可以了解整定采样时间的方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。