



各种PLC都有用于PID控制的指令、子程序或功能块,调用它们来编写PID控制程序并不困难。PID控制的难点不是编写或阅读控制程序,而是整定控制器的参数。如果使用PID控制,需要整定的主要参数有比例增益GAIN、积分时间TI、微分时间TD和采样时间CYCLE。如果使用PI控制器,也有3个主要的参数需要整定。如果参数整定得不好,即使程序设计没有问题,系统的动、静态性能也达不到要求,甚至会使系统不能稳定运行。
为了学习整定PID控制器参数的方法,必须做闭环实验,开环运行PID程序没有任何意义。如果用实际的闭环控制系统来学习调试PID控制器参数的方法,可能有一定的风险。
随书光盘中的例程“PID控制”用功能块FB100模拟实际的执行机构和被控对象,不需要任何硬件,就可以用PLCSIM对闭环控制系统仿真。可以用STEP 7集成的PID参数赋值工具,显示PID控制器的方波给定曲线和被控量的阶跃响应曲线,观察闭环控制的效果。还可以用PID参数赋值工具修改PID控制器的参数,通过观察PID控制器的参数与系统性能之间的关系,来学习整定PID控制器参数的方法。
1.闭环仿真系统的结构
随书光盘中的例程“PID控制”中的闭环控制系统,由PID连续控制器FB41“CONT_ C”和用来模拟被控对象的功能块FB100“过程对象”组成(见图8-14)。DISV是系统的扰动量,其默认值为0.0。
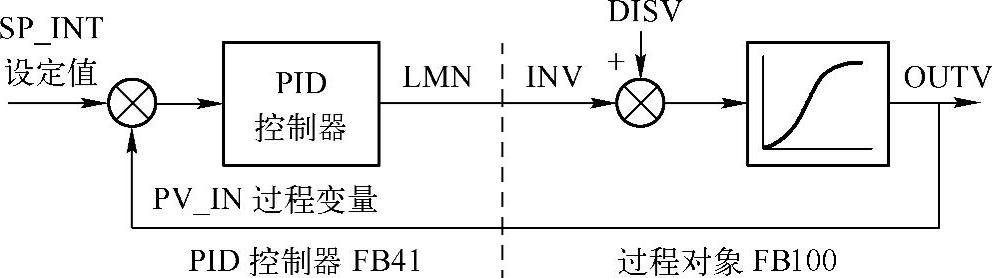
图8-14 闭环仿真系统的结构(https://www.xing528.com)
FB100用来模拟3阶惯性环节,其比例增益为GAIN,3个串联的惯性环节的时间常数分别为TM_LAG1~TM_LAG3。将某一时间常数设置为0,可以减少惯性环节的个数。
2.示例程序的结构
例程“PID控制”的主体程序是OB100和OB35,刚进入RUN模式时,CPU调用一次OB100,在HW Config中将OB35的时间间隔(即PID控制的采样时间TS)设置为200ms,程序运行时每隔200ms自动调用一次OB35。
在OB100中调用FB41和模拟被控对象的FB100,对PID控制器和被控对象的参数初始化。在OB35中调用FB41和FB100,实现PID控制和被控对象的功能。各逻辑块和数据块的符号名见图8-15。
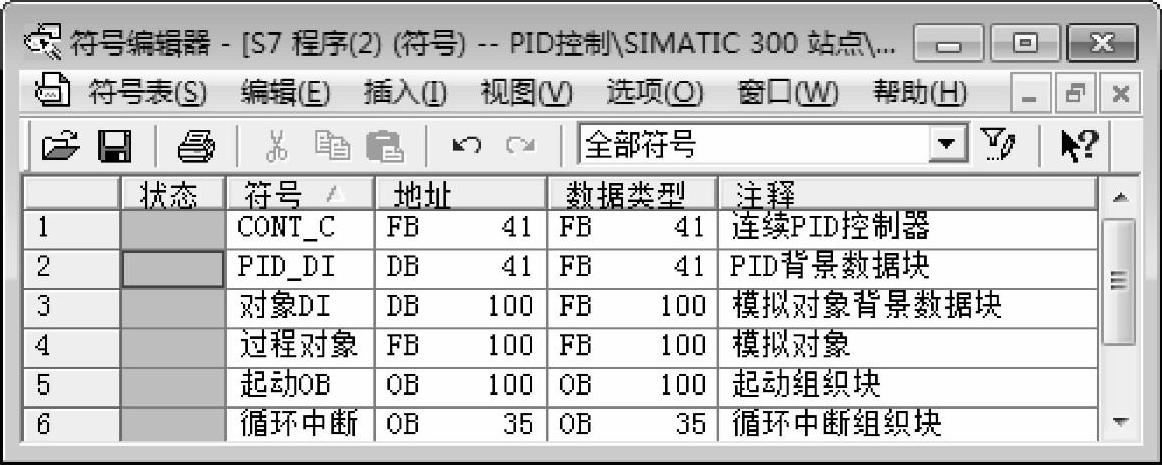
图8-15 符号表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。