



1.PID控制器在连续控制系统中的表达式
PID是比例、积分、微分的缩写,PID控制器是应用最广的闭环控制器。模拟量PID控制器的输出表达式为

式中控制器的输入量(误差信号)为

sp(t)为设定值,pv(t)为过程变量(反馈值);mv(t)是控制器的输出信号,KP为比例系数(FB41称为增益),TI和TD分别是积分时间和微分时间,M是积分部分的初始值。
式(8-1)中等号右边的前3项分别是比例、积分、微分部分,它们分别与误差ev(t)、误差的积分和误差的一阶导数成正比。如果取其中的一项或两项,可以组成P、PI或PD调节器。一般采用PI控制方式,控制对象的惯性滞后较大时,应采用PID控制方式。
控制器输出量中的比例、积分、微分部分都有明确的物理意义。
2.对比例控制作用的理解
PID的控制原理可以用人对炉温的手动控制来理解。假设用热电偶检测炉温,用数字式仪表显示温度值。在人工控制过程中,操作人员用眼睛读取炉温,并与炉温的设定值比较,得到温度的误差值。用手操作电位器,调节加热的电流,使炉温保持在设定值附近。有经验的操作人员通过手动操作可以得到很好的控制效果。
操作人员知道使炉温稳定在设定值时电位器的大致位置(我们将它称为位置L),并根据当时的温度误差值调整电位器的转角。炉温小于设定值时,误差为正,在位置L的基础上顺时针增大电位器的转角,以增大加热的电流;炉温大于设定值时,误差为负,在位置L的基础上反时针减小电位器的转角,以减小加热的电流。令调节后的电位器转角与位置L的差值与误差绝对值成正比,误差绝对值越大,调节的角度越大。上述控制策略就是比例控制,即PID控制器输出中的比例部分与误差成正比,比例系数(增益)为式(8-1)中的KP。
闭环中存在着各种各样的延迟作用。例如调节电位器转角后,到温度上升到新的转角对应的稳态值有较大的延迟。温度的检测、模拟量转换为数字值和PID的周期性计算都有延迟。由于延迟因素的存在,调节电位器转角后不能马上看到调节的效果,因此闭环控制系统调节困难的主要原因是系统中的延迟作用。
如果增益太小,即调节后电位器转角与位置L的差值太小,调节的力度不够,将使温度的变化缓慢,调节时间过长。如果增益过大,即调节后电位器转角与位置L的差值过大,调节力度太强,造成调节过头,可能使温度忽高忽低,来回震荡。
与具有较大滞后的积分控制作用相比,比例控制作用与误差同步,在误差出现时,比例控制能立即起作用,使被控制量朝着误差减小的方向变化。
如果闭环系统没有积分作用(即系统为自动控制理论中的0型系统),由理论分析可知,单纯的比例控制有稳态误差,稳态误差与增益成反比。
图8-6和图8-7中的方波是比例控制的给定曲线,图8-6的系统增益小,超调量小,震荡次数少,但是稳态误差大。增益增大几倍后,启动时被控量的上升速度加快(见图8-7),稳态误差减小,但是超调量增大,振荡次数增加,调节时间加长,动态性能变坏。增益过大甚至会使闭环系统不稳定。因此单纯的比例控制很难兼顾动态性能和稳态性能。
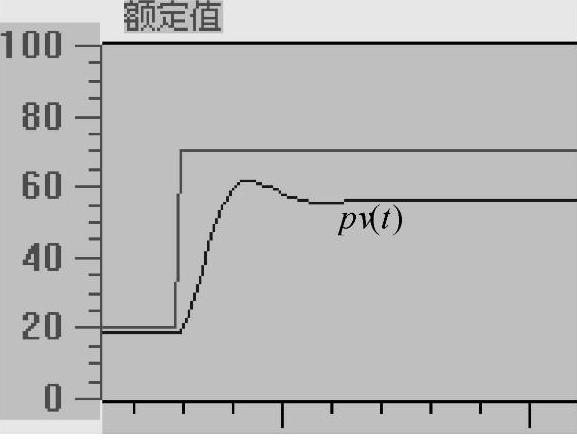
图8-6 比例控制的阶跃响应曲线

图8-7 比例控制的阶跃响应曲线
3.对积分控制作用的理解
(1)积分的几何意义与近似计算
PID程序是周期性执行的,执行PID程序的时间间隔为采样时间TS。第n次PID运算时的时间为TSn,因为PID程序运行时TS为常数,将t=TSn时PID控制器的输入量ev(TSn)简写为ev(n),输出量mv(TSn)简写为mv(n)。
式(8-1)中的积分∫ev(t)dt对应于图8-8中误差曲线ev(t)与坐标轴包围的面积(图中的灰色部分)。我们只能使用连续的误差曲线上间隔时间为TS的一些离散的点的值来计算积分,因此不可能计算出准确的积分值,只能对积分作近似计算。
一般用8-8图中的矩形面积之和来近似计算精确积分。每块矩形的面积为ev(jTS)TS。为了书写方便,将ev(jTS)简写为ev(j),各块矩形的总面积为  。当TS较小时积分的误差不大。可以理解为每次PID运算时,积分运算是在原来的积分值的基础上,增加一个与当前的误差值成正比的微小部分(对应于新增加的矩形面积)。在图8-9中A点和B点、C点和D点之间,设定值大于反馈值,误差为正,积分项增大。在B点和C点之间,反馈值大于设定值,误差为负,积分项减小。
。当TS较小时积分的误差不大。可以理解为每次PID运算时,积分运算是在原来的积分值的基础上,增加一个与当前的误差值成正比的微小部分(对应于新增加的矩形面积)。在图8-9中A点和B点、C点和D点之间,设定值大于反馈值,误差为正,积分项增大。在B点和C点之间,反馈值大于设定值,误差为负,积分项减小。

图8-8 积分的近似运算
(2)积分控制的作用
在上述的温度控制系统中,积分控制相当于根据当时的误差值,周期性地微调电位器的角度。温度低于设定值时误差为正,积分项增大一点点,使加热电流增加;反之积分项减小一点点。只要误差不为零,控制器的输出就会因为积分作用而不断变化。积分这种微调的“大方向”是正确的,因此积分项有减小误差的作用。只要误差不为零,积分项就会向减小误差的方向变化。在误差很小的时候,比例部分和微分部分的作用几乎可以忽略不计,但是积分项仍然不断变化,用“水滴石穿”的力量,使误差趋近于零。
在系统处于稳定状态时,误差恒为零,比例部分和微分部分均为零,积分部分不再变化,并且刚好等于稳态时需要的控制器的输出值,对应于上述温度控制系统中电位器转角的位置L。因此积分部分的作用是消除稳态误差,提高控制精度,积分作用一般是必需的。在纯比例控制的基础上增加积分控制(即PI控制),被控量最终等于设定值(见图8-10),稳态误差被消除。

图8-9 PID控制器输出中的积分分量

图8-10 PI控制器的阶跃响应曲线
(3)积分控制的缺点
积分项与当前误差值和过去的历次误差值的累加值成正比,因此积分作用具有严重的滞后特性,对系统的稳定性不利。如果积分时间设置得不好,其负面作用很难通过积分作用迅速地修正。如果积分作用太强,相当于每次微调电位器的角度值过大。其累积的作用与增益过大相同,会使系统的动态性能变差,超调量增大,甚至使系统不稳定。积分作用太弱,则消除误差的速度太慢。(https://www.xing528.com)
(4)积分控制的应用
PID的比例部分没有延迟,只要误差一出现,比例部分就会立即起作用。具有滞后特性的积分作用很少单独使用,它一般与比例控制和微分控制联合使用,组成PI或PID控制器。
PI和PID控制器既克服了单纯的比例调节有稳态误差的缺点,又避免了单纯的积分调节响应慢、动态性能不好的缺点,因此被广泛使用。如果控制器有积分作用(例如采用PI或PID控制),积分能消除阶跃输入的稳态误差,这时可以将增益调得小一些。
(5)积分部分的调试
因为积分时间TI在式(8-1)的积分项的分母中,TI越小,积分项变化的速度越快,积分作用越强。综上所述,积分作用太强(即TI太小),系统的稳定性变差,超调量增大。积分作用太弱(即TI太大),系统消除稳态误差的速度太慢,TI的值应取得适中。
4.对微分控制作用的理解
(1)微分的几何意义与近似计算
在误差曲线ev(t)上作一条切线(见图8-11),该切线与x轴正方向的夹角α的正切值tanα即为该点处误差的一阶导数dev(t)/dt。PID控制器输出表达式(8-1)中的导数用下式来近似:

式中,ev(n-1)(见图8-11)是第n-1次采样时的误差值。将积分和导数的近似表达式代入式(8-1),第n次采样时控制器的输出为

在FB41“CONT_C”(连续控制器)中,KP、TI、TD和M分别对应于输入参数GAIN、TI、TD和积分初始值I_ITLVAL。
(2)微分部分的物理意义
PID输出的微分分量与误差的变化速率(即导数)成正比,误差变化越快,微分分量的绝对值越大。微分分量的符号反映了误差变化的方向。在图8-12的A点和B点之间、C点和D点之间,误差不断减小,微分分量为负;在B点和C点之间,误差不断增大,微分分量为正。控制器输出量的微分部分反映了被控量变化的趋势。
有经验的操作人员在温度上升过快,但是尚未达到设定值时,根据温度变化的趋势,预感到温度将会超过设定值,出现超调。于是调节电位器的转角,提前减小加热的电流。这相当于士兵射击远方的移动目标时,考虑到子弹运动的时间,需要一定的提前量一样。

图8-11 微分的近似计算

图8-12 PID控制器输出中的微分分量
在图8-12中启动过程的上升阶段(A点到E点),被控量尚未超过其稳态值,超调还没有出现。但是因为被控量不断增大,误差e(t)不断减小,误差的导数和控制器输出量的微分分量为负,使控制器的输出量减小,相当于减小了温度控制系统的加热功率,提前给出了制动作用,以阻止温度上升过快,所以可以减小超调量。因此微分控制具有超前和预测的特性,在温度尚未超过稳态值之前,根据被控量变化的趋势,微分作用就能提前采取措施,以减小超调量。在图8-12的E点和B点之间,被控量继续增大,控制器输出量的微分分量仍然为负,继续起制动作用,以减小超调量。
闭环控制系统的振荡甚至不稳定的根本原因在于有较大的滞后因素,因为微分分量能预测误差变化的趋势,微分控制的超前作用可以抵消滞后因素的影响。适当的微分控制作用可以使超调量减小,调节时间缩短,增加系统的稳定性。对于有较大惯性或滞后的被控对象,控制器输出量变化后,要经过较长的时间才能引起反馈值的变化。如果PI控制器的控制效果不理想,可以考虑在控制器中增加微分作用,以改善闭环系统的动态特性。
(3)微分部分的调试
微分时间TD与微分作用的强弱成正比,TD越大,微分作用越强。微分作用的本质是阻碍被控量的变化,如果微分作用太强(TD太大),对误差的变化压抑过度,将会使响应曲线变化迟缓,超调量反而可能增大(见图8-22)。此外微分部分过强会使系统抑制干扰噪声的能力降低。综上所述,微分控制作用的强度应适当,太弱则作用不大,过强则有负面作用。如果将微分时间设置为0,微分部分将不起作用。
(4)不完全微分PID
微分作用的引入可以改善系统的动态性能,其缺点是对干扰噪声敏感,使系统抑制干扰的能力降低。为此在微分部分增加一阶惯性滤波环节,以平缓PID控制器输出中微分部分的剧烈变化。这种PID称为不完全微分PID。
设惯性滤波环节的时间常数为Tf,不完全微分PID的传递函数为

在FB41中,Tf对应于微分操作的延迟时间TM_LAG。闲环仿真发现,如果采用了不完全微分PID,当TD和Tf太大时,将会使响应曲线变得很怪异,甚至会出现“毛刺”。
5.怎样实现PID控制
S7-300的FM 355和S7-400的FM 455是智能化的4路和16路通用闭环控制模块,它们集成了闭环控制需要的I/O点和软件,FM 455提供了PID算法和自优化温度控制算法。
PID控制模块的价格较高,因此一般使用普通的信号模块和PID控制功能块(FB)来实现PID控制。所有型号的CPU都可以使用PID控制功能块FB41~FB43,和用于温度闭环控制的FB58和FB59,它们在程序编辑器左边窗口的文件夹“\库\Standard Library(标准库)\PID Control-ler(PID控制器)”中。FB41~FB43除了PID控制器功能以外,还可以处理设定值和过程反馈值,以及对控制器的输出值进行后期处理。计算所需的数据保存在指定的背景数据块中。
FB41“CONT_C”(连续控制器)输出的数字值一般用AO模块转换为连续的模拟量。
FB43(脉冲发生器)与FB41组合,可以产生脉冲宽度调制的开关量输出信号,来控制比例执行机构,例如可以用于加热和冷却控制。FB42“CONT_S”用于步进控制,其特点是可以直接用它的两点开关量输出信号控制电动阀门,从而省去了电动调节阀内部的位置闭环控制器和位置传感器。FB42和FB43的应用实例见参考文献[1]。
实际控制中FB41用得最多,FB43用得较少,FB42用得很少。CPU 31xC还可以使用集成在CPU中与FB41~FB43兼容的SFB41~SFB43。
FB58(连续温度控制)和FB59(温度步进控制)有参数自整定功能,FB41和FB42则需要安装软件PID Self Tuner来实现在线的参数自整定
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。