



1.硬件结构
为了满足生产的需要,很多设备要求设置多种工作方式,例如手动方式和自动方式,后者包括连续、单周期、单步、自动返回原点几种工作方式。手动程序比较简单,一般用经验法设计,复杂的自动程序一般用顺序控制法设计。
图5-27中的机械手用来将工件从A点搬运到B点,操作面板如图5-28所示,图5-29是PLC的外部接线图。夹紧装置用单线圈电磁阀控制,输出Q4.1为1时工件被夹紧,为0时被松开。工作方式选择开关的5个位置分别对应于5种工作方式,操作面板左下部的6个按钮是手动按钮。为了保证在紧急情况下(包括PLC发生故障时)能可靠地切断PLC的负载电源,设置了交流接触器KM(见图5-29)。运行时按下“负载电源”按钮,使KM线圈得电并自锁,KM的主触点接通,给外部负载提供交流电源,出现紧急情况时用“紧急停车”按钮断开负载电源。
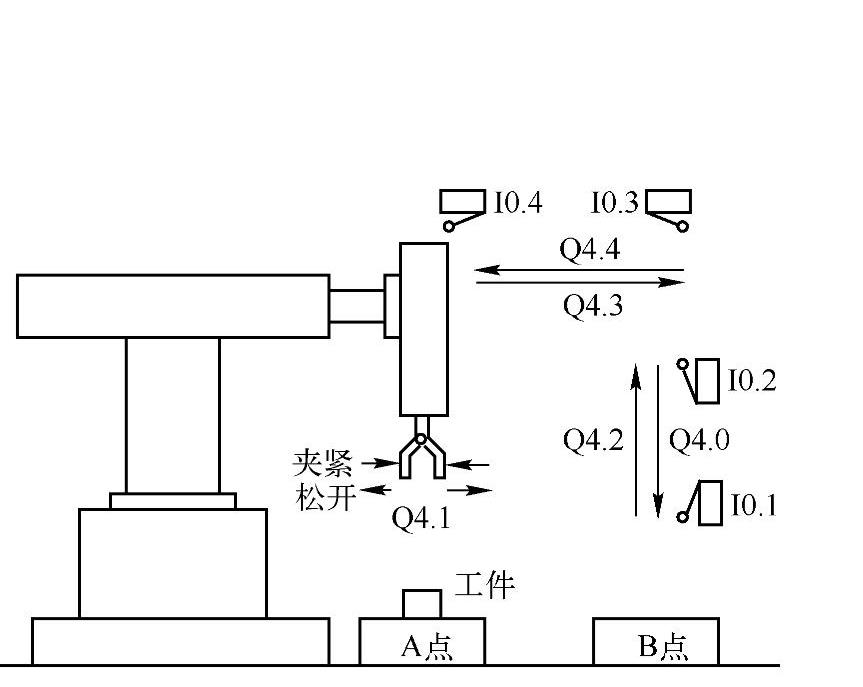
图5-27 机械手示意图
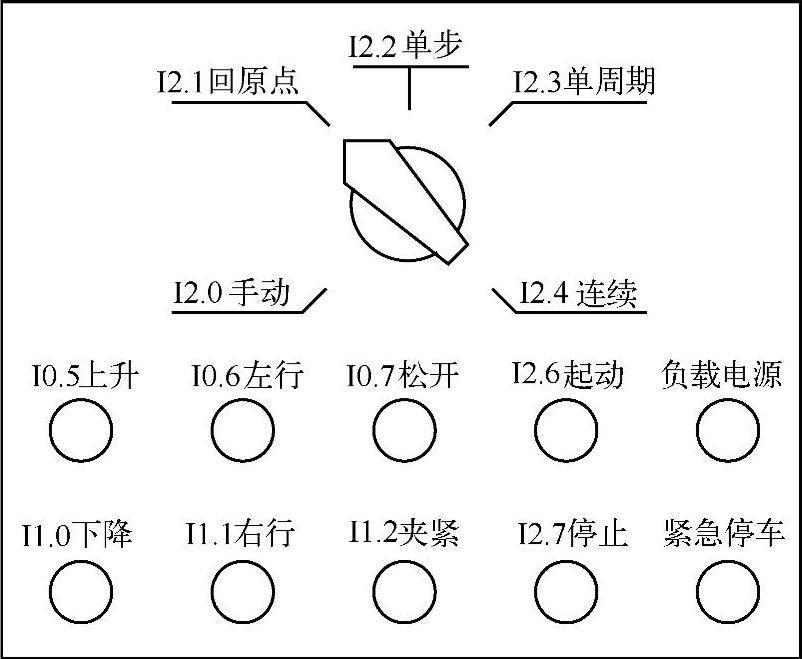
图5-28 操作面板
2.工作方式
系统设有手动、单周期、单步、连续和回原点5种工作方式,用单刀五掷开关切换机械手的工作方式。机械手从初始状态开始,将工件从A点搬运到B点,最后返回初始状态的过程,称为一个工作周期。
1)在手动工作方式,用I0.5~I1.2对应的6个按钮分别独立控制机械手的升、降、左行、右行和松开、夹紧。
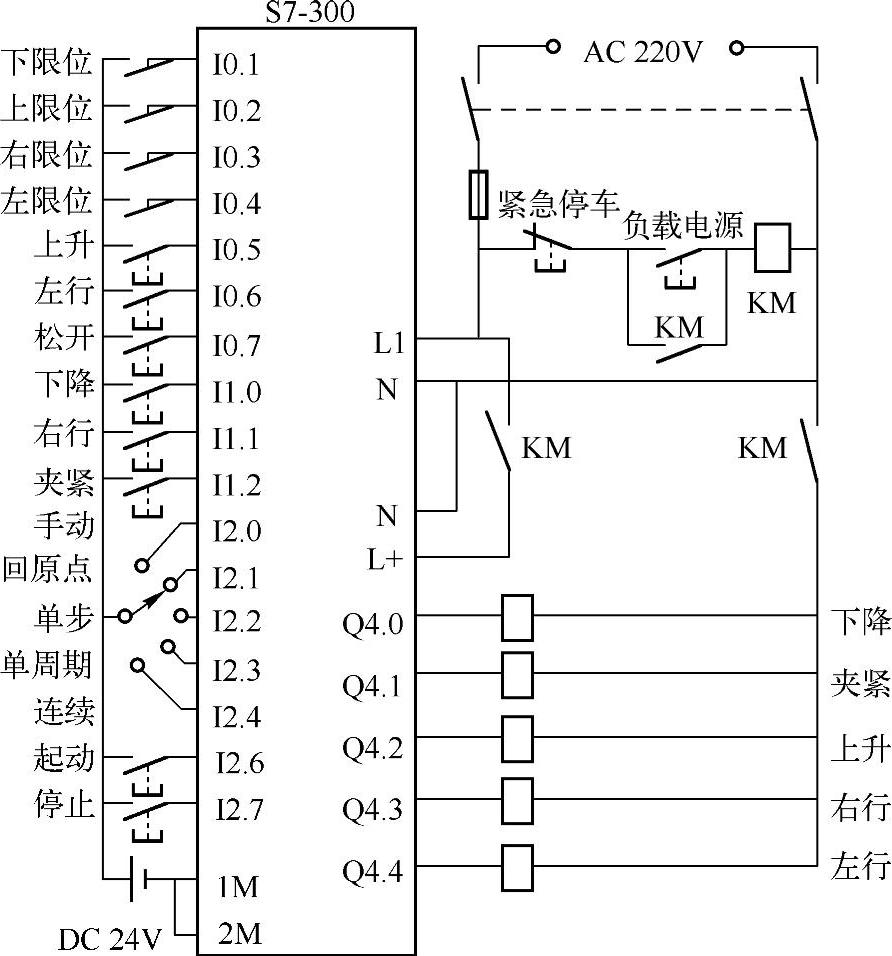
图5-29 PLC外部接线图(https://www.xing528.com)
2)在单周期工作方式的初始状态按下起动按钮I2.6,从初始步M0.0开始,机械手按顺序功能图(见图5-35)的规定完成一个周期的工作后,返回并停留在初始步。
3)在连续工作方式的初始状态按下起动按钮,机械手从初始步开始,工作一个周期后又开始搬运下一个工件,反复连续地工作。按下停止按钮,并不马上停止工作,完成最后一个周期的工作后,系统才返回并停留在初始步。
4)在单步工作方式,从初始步开始,按一下起动按钮,系统转换到下一步,完成该步的任务后,自动停止工作并停留在该步,再按一下起动按钮,才开始执行下一步的操作。单步工作方式常用于系统的调试。
5)机械手在最上面和最左边且夹紧装置松开时,称为系统处于原点状态(或称初始状态)。在进入单周期、连续和单步工作方式之前,系统应处于原点状态。如果不满足这一条件,可以选择回原点工作方式,然后按起动按钮I2.6,使系统自动返回原点状态。符号表见图5-30。

图5-30 符号表
3.程序的总体结构
项目的名称为“机械手控制”(见随书光盘中的同名例程),在主程序OB1中,用调用功能(FC)的方式来实现各种工作方式的切换(图5-31)。公用程序FC1是无条件调用的,供各种工作方式公用。由外部接线图可知,工作方式选择开关是单刀5掷开关,同时只能选择一种工作方式。
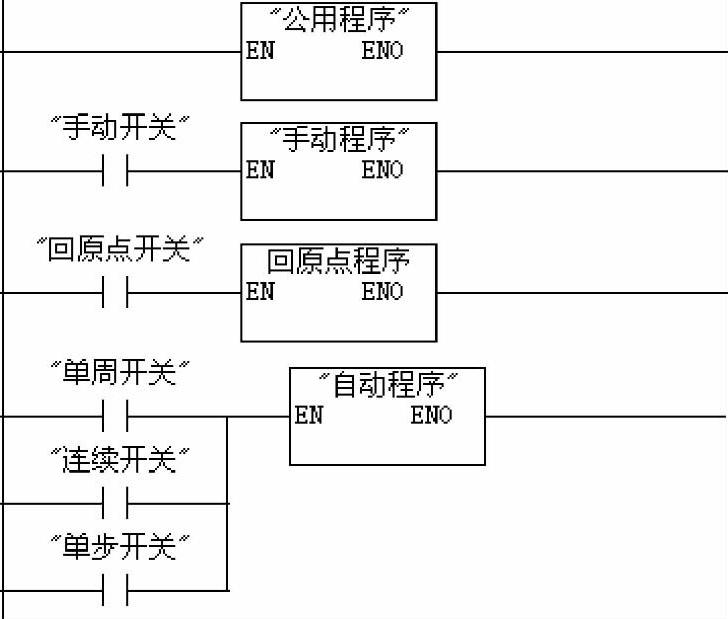
图5-31 主程序OB1
方式选择开关在手动位置时调用手动程序FC2,选择回原点工作方式时调用回原点程序FC4。可以为连续、单周期和单步工作方式分别设计一个单独的子程序。考虑到这些工作方式使用相同的顺序功能图,程序有很多共同之处,为了简化程序,减少程序设计的工作量,将单步、单周期和连续这3种工作方式的程序合并为自动程序FC3。在自动程序中,应考虑用什么方法区分这3种工作方式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。