



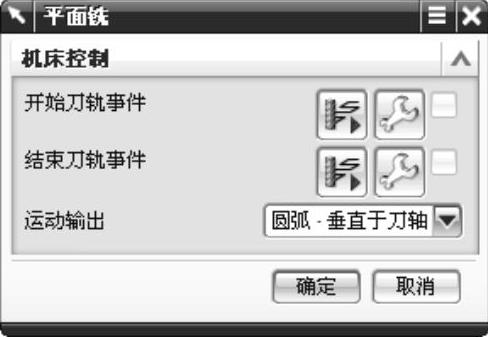
图2-69 “机床控制”选项
“机床控制”用于指定机床事件,例如刀具更改、开始和结束事件(为用户定义的)或者特殊的后处理命令,以及控制运动输出的类型,如图2-69所示。
1.开始刀轨事件和结束刀轨事件
用于用户定义开始和结束刀轨时输入后处理的命令。
2.运动输出
用于控制刀具路径的生成方式,包括以下选项:
(1)仅线性 生成的刀具路径全部由直线走刀组成,在刀具路径中不存在圆弧走刀,在圆角处的圆弧走刀则由多条直线走刀逼近。因此,在刀具位置源文件(CLSF)中只有GOTO语句,没有Circle语句。在后置处理程序中也只能见到G01语句,而没有G02和G03语句。
(2)圆弧—垂直于刀轴 在垂直于刀轴平面内,刀具运动尽可能由圆弧走刀组成,系统可将一系列直线走刀用一个圆弧走刀近似替代。刀具路径段为直线或不垂直于刀轴的曲线时,刀具运动是直线走刀;刀具路径段为曲线且垂直于刀轴时,刀具运动由圆弧走刀近似替代。因此,在刀具位置源文件(CLSF)和后置处理程序中既可能有直线走刀语句,也可能有圆弧走刀语句。
(3)圆弧—垂直/平行于刀轴 在垂直于或平行于刀轴平面内,刀具运动尽可能由圆弧走刀组成,系统可将一系列直线走刀用一个圆弧走刀近似替代。因此,在刀具位置源文件(CLSF)和后置处理程序中既可能有直线走刀语句,也可能有圆弧走刀语句。
(4)Nurbs系统使刀具尽可能沿着B样条曲线移动,而不是沿近似的直线圆弧移动。刀具路径段为直线时,刀具运动是直线走刀;刀具路径段为曲线时,刀具运动由B样条走刀近似替代。因此,在刀具位置源文件(CLSF)和后置处理程序中既可能有直线走刀语句,也可能有B样条走刀语句,但是无圆弧走刀语句。当用五坐标高速加工光顺精度要求高的表面时,应该选择该方式。
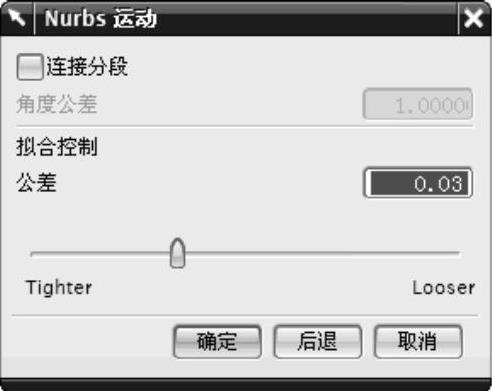
在UGNX7.0中如果选择Nurbs选项后,系统弹出“Nurbs运动”对话框,如图2-70所示。该选项用于设置分段的Nurbs曲线是否连接成一条曲线,以及是否用角度公差和拟合公差控制曲线连接的光滑程度。
1)【连接分段】:连接分段可决定单独的曲线段是否合并在一起形成一条曲线,以便构成每个切削刀路的单个Nurbs,如图2-71所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-70 “Nurbs运动”对话框
2)【角度公差】:当选中“连接分段”时,“角度公差”可用。该选项允许决定在构成Nurbs的连接曲线之间所形成的哪些角度将被光顺。小于或等于指定“角度公差”的角度将被光顺处理;大于指定“角度公差”的角度将不进行光顺处理。要获得可靠的结果,应使用小于等于5°的角度公差,如图2-72所示。
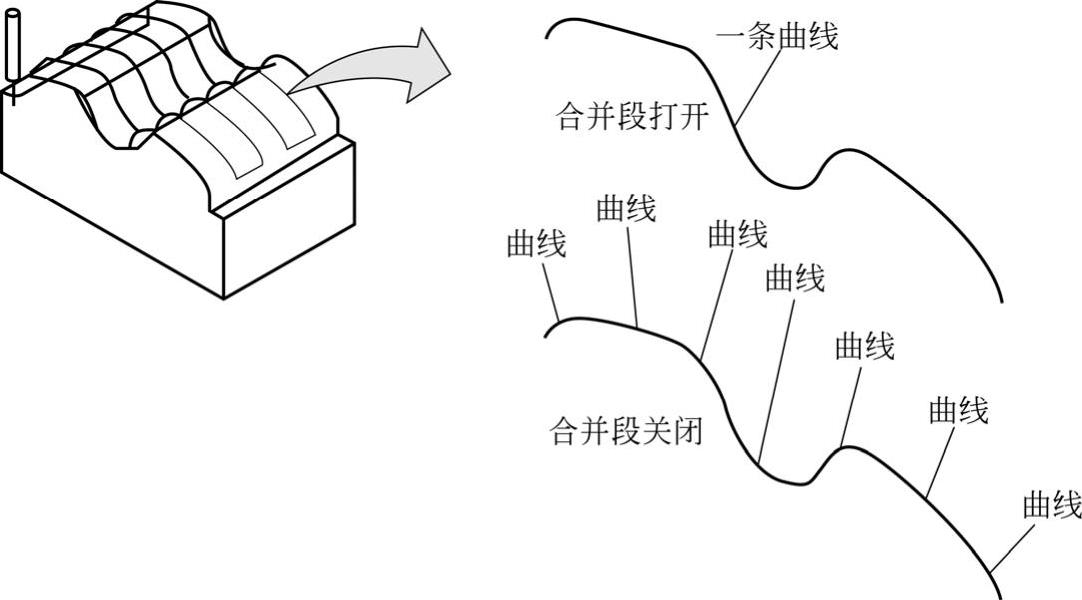
图2-71 连接分段
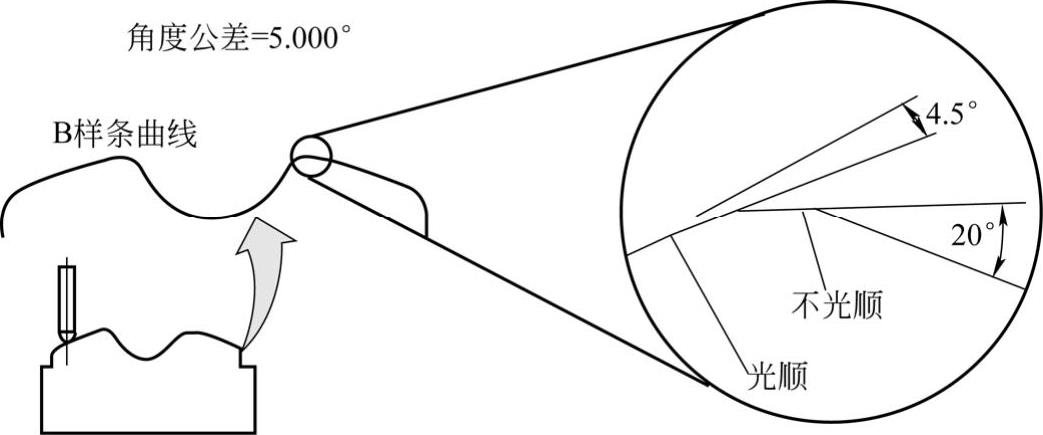
图2-72 小于指定角度公差的角度将被光顺处理
3)【拟合控制公差】:“拟合控制公差”与“角度公差”结合使用,指定的拟合控制公差决定了应用到角度的光顺程度。拟合控制公差越大,曲线之间的圆角就越光顺,如图2-73所示。
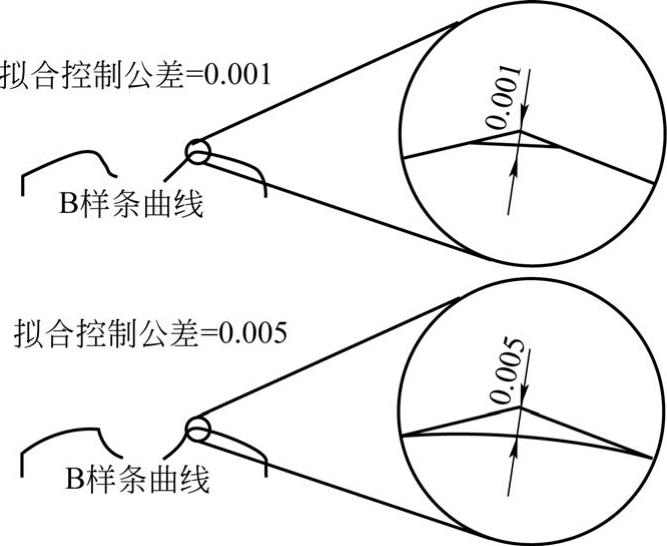
图2-73 更大的拟合控制公差可形成更光顺的圆角
除了决定应用到角度的光顺程度之外,拟合控制公差还可决定刀轨跟随Nurbs的准确程度。更严格的公差(通过更小的值定义)会使刀轨更准确地跟随Nurbs,如图2-74所示。
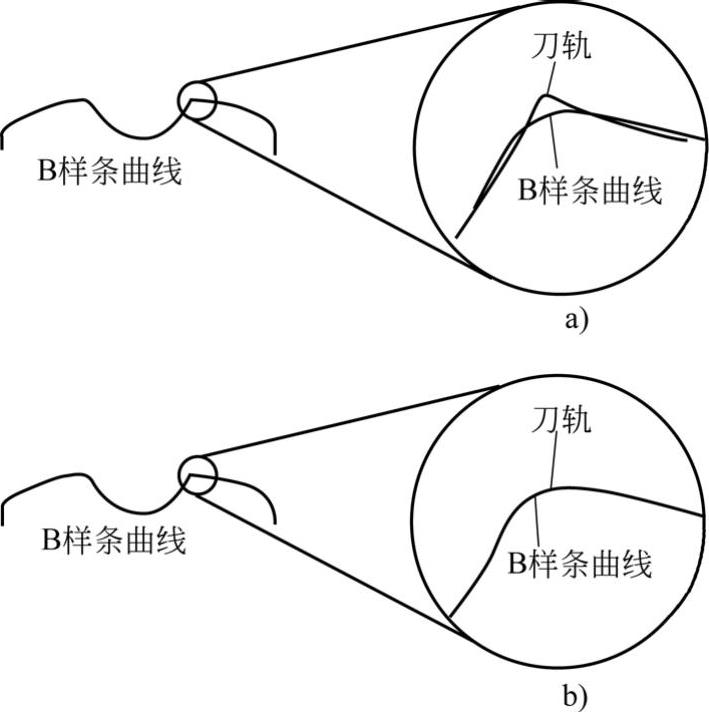
图2-74 松拟合控制公差和紧拟合控制公差
a)松拟合控制公差 b)紧拟合控制公差
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。