



可调速的电气传动装置的主电路由电动机和半导体变换器组成。通过改变这个变换器的输出电流和电压来改变电动机的转矩和转速。在第5章和第6章已经分别对基本的直流和交流调速系统做了介绍。为了达到稳态和动态控制精度,需要实行闭环控制,控制系统中应当有相应的电流、速度或者位置调节器。
调节器可分为模拟式调节器和数字式调节器。早期的控制装置使用的都是模拟式调节器,随着集成电路技术的发展,功能强大的单片微处理器芯片问世,数字式调节器逐渐取代了模拟式调节器。数字式调节器的优点是精度高、算法灵活,易于功能扩展、稳定性好、可靠性高。数字式调节器的理论基础和控制思想都源于模拟式调节器,只有掌握了模拟式调节器的原理,才能用好数字式调节器。
模拟式调节器的硬件主体是集成电路的运算放大器,运算放大器的开环放大倍数很大,加上适当的反馈元件和输入元件就构成各种调节器。
常用的调节器有:比例(P)调节器、积分(I)调节器、比例积分(PI)调节器、比例积分微分(PID)调节器等不同类型。PID调节器之所以经久不衰是因为这种调节器原理简单,调节效果好,技术成熟;无需复杂的数学模型,易于掌握。
PID调节器的微分方程和传递函数是

式中 e(t)、E(p)——调节器输入电压和输出电压之间的偏差值及其拉式变换;
uo(t)、Uo(p)——调节器的输出电压及其拉式变换;
Kp、Ti、Td——调节器的比例系数、积分时间常数、微分时间常数。
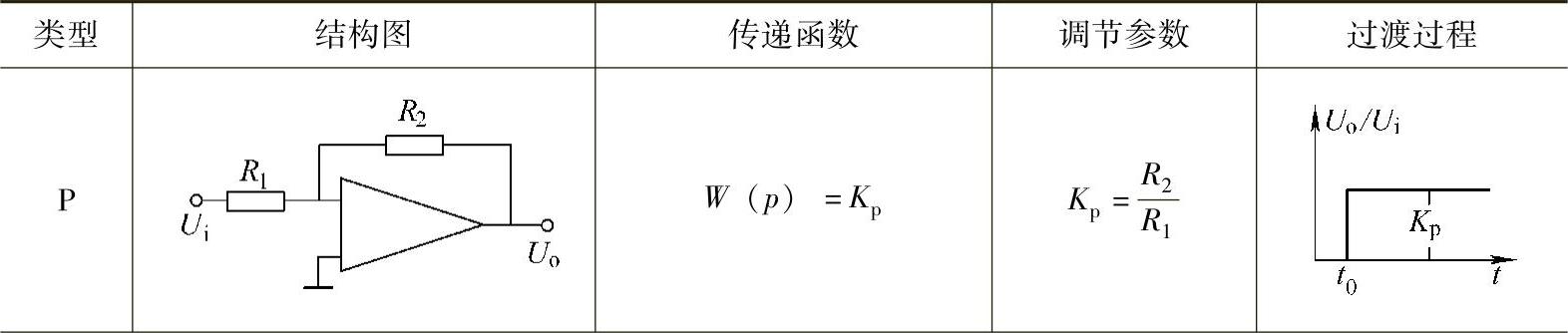
表10-1中描述了各类调节器的框图、传递函数、调节参数以及过渡过程。
在电气传动控制系统中,调节器的稳压电源为直流±15V电压,考虑到电流控制最大应当有2.5倍的过载能力,电流信号的标准值是0~±5V,速度信号的标准值是0~±10V。
表10-1 各类调节器的结构图、传递函数、调节参数以及过渡过程
(续)

比例调节器最简单,它的输出与输入的偏差信号成比例关系。当偏差出现时,在比例控制的作用下,使偏差减小,但是不能消除偏差。积分调节器是对偏差信号进行积分,它的主要作用是消除静差,提高调节的精度。微分调节器的作用是对偏差信号的变化率进行调节,提前控制,使偏差消灭在萌芽状态,加快响应速度,减小超调量。简单概括为:比例作用保证调节过程的“稳”,积分作用是保证调节过程的“准”,微分作用是促进调节过程的“快”。比例作用的强弱取决于比例系数的大小,增大可以增强比例作用,减小静差,但是该值过大,会引起振荡。积分作用的强弱取决于积分时间常数,该值越小,积分作用越强,响应越快,越容易引起振荡。微分作用的强弱取决于微分时间常数,该值越大,微分作用越强,响应越快,越容易引起振荡。
电气传动控制系统中的调节器多做成PI调节器,微分用得较少。调整时可以先调比例部分,置积分作用为零。比例值由小到大改变,满意后再加入积分作用,逐渐增大积分作用,同时可以减小比例的作用,直至满意为止。
现代的数字式传动控制系统中具有自动优化功能:利用向电动机通电和带动电动机转动的方法,测量电动机的电气时间常数和机电时间常数。根据最佳控制原理计算出调节器的参数,并直接配置到数字式调节器,确实给使用者带来极大的便利。
数字式调节器的基本数学原理同模拟式调节器,只是采用了离散数学的算法。数字式调节器的优点是:
(1)运行速度快:现在的芯片制造技术已经可以做到执行一条指令的指令周期在10纳秒的数量级,完全满足传动控制的毫秒级要求。对于简单的传动装置,现在已经出现由一个CPU单元控制多台设备的情况。对于复杂的传动装置,可以采用多个CPU并行总线工作的方式。
(2)控制算法灵活:数字式调节器不但可以实现传统的PID算法,而且还可以采用等多种复杂的算法。有许多很多先进的控制理论只能在数字式控制器中实现,因为在模拟时控制器中无法用运算放大器构建如此复杂、灵活的电路。(https://www.xing528.com)
(3)可靠性高:因为控制算法是用软件书写的程序,比硬件组成的控制电路具有更高的可靠性,并且维护简单。
(4)可以通过调节的品质,提高产品的产量和质量:针对设备不同工艺情况开发出适应多种要求的程序,在外界条件变化时自动切换控制程序,不因人为的因素造成失调,因而使调节品质保持最优状态,提高产品的产量和质量。
(5)便于实现电气传动控制和自动化系统的通信功能:通过串行接口实现电气传动装置和基础自动化系统的通信,减少大量的接线电缆,提高了整体自动化水平。
(6)提高生产安全性:利用数字控制的优点,可以在控制程序中加入故障报警和故障保护功能,更好地保护设备和人身安全。
数字式调节器的做法是用采样的方法对模拟信号进行离散化成为数字信号。采样后的离散信号经过保持器后得到阶梯信号。根据香农采样定理,只要采样频率高于信号最高频率的2倍,或者采样周期小于信号最小的周期的一半,即T<π/ωmax,那么,原来的连续信号可以从采样的样本中完全重建出来。电气传动系统中PID调节器信号的采样周期在1~4ms。
描述PID调节过程的微分方程经过离散化之后成为差分方程,式(10-2)对应的差分方程为

式中 uk——调节器第k次采样的输出;
T——采样周期;
u0——积分常数;
ek、ek-1——第k次、第k-1次采样周期内的偏差信号。
数字PID的算法很多,目前比较流行的算法有四种:全量式算法、增量式算法、微分先行算法、积分分离算法。这四种算法虽然简单,但是各有特点,基本能够满足电气传动的控制要求。
(1)全量式算法是根据式(10-4),直接计算当前的全部输出量uk,在某些控制系统中uk对应着阀门的控制位置,所以又叫做位置式算法。因为全量式算法每次采样周期计算的输出值uk和控制的偏差值ek都包含全部的过去值累加项∑ei,所以与全部的过去变化过程有关,很容易产生较大的积累误差,出现超调现象。
(2)增量式算法计算的是相邻两次采样周期中输出量的增量Δuk,需要以前k-2、k-1、k三次偏差值。即

由于增量式算法中消掉了累加项,计算量较小。输出增量Δuk对应着输出电压的变化部分,计算误差对于控制的影响较小。增量式算法中不含初始值u0,对于一些特殊的场合,易于实现手动到自动的切换。
(3)微分先行算法相当于微分反馈的作用,只对反馈值进行微分计算,不对给定值进行微分计算。这是因为给定值中有会可能出现阶跃性的变化,经过微分作用之后导致输出量大幅度变化,不利于系统的稳定性。而反馈量变化总是比较缓和的,通过微分作用可以起到超前控制的作用,既避免了系统振荡,又改善了系统的动态响应特性。
(4)积分分离算法的思想是:当被控量和目标值相差较小时,引入积分项以减小静差;当被控量和目标值相差较大时,取消积分项以提高调节速度。通常人为设定一个阈值e>0,当ek>e时,取消积分项;当ek<e时,引入积分项。实际应用时还可有所改进,采用分段分离的方法:选取多个阈值,各段采用不同的积分强度。
在电动机控制领域中,数字控制技术并不是简单地把模拟控制技术转化为数字控制方式,而是利用数字控制技术实现模拟控制技术所无法实现的控制算法和方案,例如实现模糊控制、神经元网络理论、遗传算法等电动机控制的新理论。最近对于模糊控制和神经元网络理论的期望值有些减低,而对于遗传算法的期望值正在增强。今后的电动机控制理论更加倾向于把非线性控制方法和能够生成指令的人工智能等课题作为研究的热点,作为这种数字控制技术的硬件基础就是微处理器。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。