



本节研究晶闸管—直流电动机电气传动系统的过渡过程。晶闸管整流器被视为一个放大倍数为常数的比例环节。由以下方程来描述恒定励磁的直流电动机的过渡过程(见5.1节)。
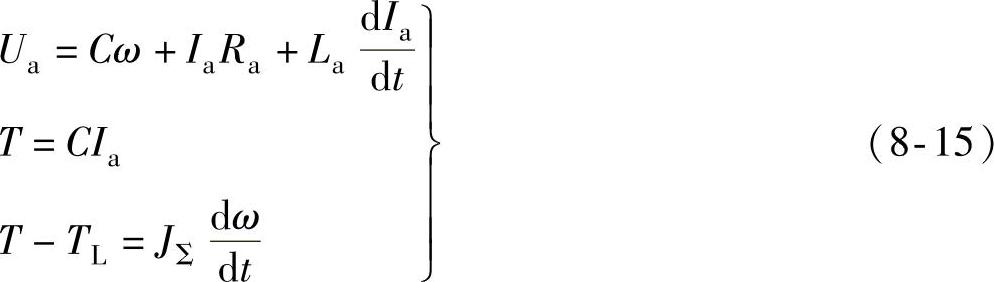
式中 C——磁通不变时的转矩系数,C=CTΦ。
研究直流电动机的过渡过程需要考虑两个惯性环节,即考虑两个时间常数:机电时间常数τm和电枢回路的电磁时间常数τa。

由式(8-15)、式(8-16)和式(8-17)得到

式中 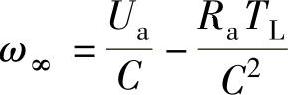 ——转速的稳态值。
——转速的稳态值。
二阶微分方程(8-18)是研究电动机过渡过程的通式。凡是机械特性为线性形式的电动机,都可以用此式描述,区别只在于机械特性的硬度β不同。
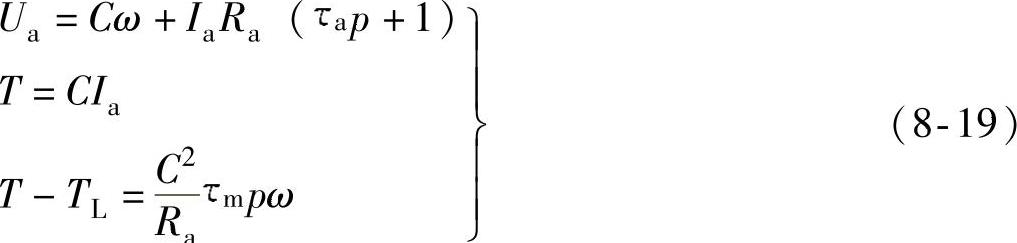
用微分算子p=d/dt代替式(8-15)中的微分项,得到如式(8-19)的形式,并可据此绘出电动机的结构框图。
恒定励磁情况下的直流电动机结构框图8-5中由4个典型环节构成:电枢回路——由电枢电压产生电枢电流,惯性环节的时间常数是τa;电磁耦合环节——电枢电流在气隙磁通作用下产生电磁转矩,电能转变为机械能,比例环节的系数为C;机械部分——反映了机械部分的转动惯量,惯性环节的时间常数是τm;内部反馈环节——电动机内部的旋转电动势,比例环节的系数为C。
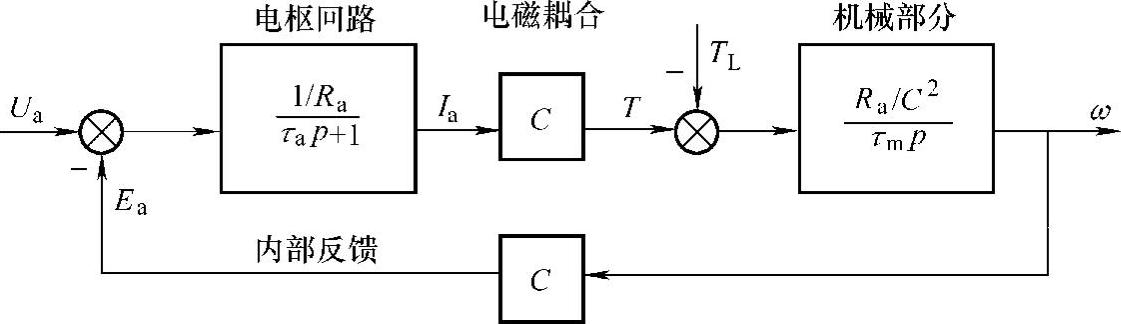
图8-5 恒定励磁的直流电动机的传递函数框图
以电枢电压Ua为输入量,电动机的转速ω为输出量,电动机的传递函数为

特征方程

的两个根 决定了过渡过程的特性。
决定了过渡过程的特性。
如果τm>4τa,两个特征根均为负的实数根,描述转速过渡过程的微分方程(8-18)的解为指数形式,即

在这种情况下,转速的过渡过程呈单调二阶惯性环节的特性(见图8-6)。
如果τm<4τe,两个特征根为负实部的共轭复数,p1,2=α±jΩ,

描述转速过渡过程的微分方程(8-18)的解为

常数C1和C2由过渡过程的初始条件和终了条件确定。
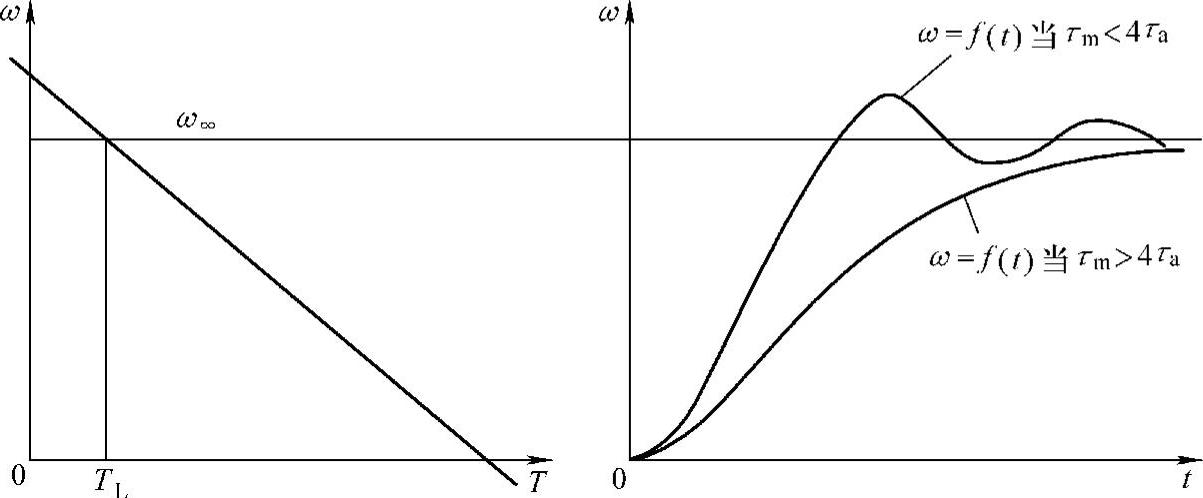
图8-6 具有线性机械特性的电动机在起动时的过渡过程曲线
在这种情况下,过渡过程为指数衰减振荡的形式(见图8-6)。振荡的频率是Ω,过渡过程持续的时间大约是(6~10)τa。振荡的本质是电磁能量与动能之间周期性的相互转换。指数衰减的过程只与电磁时间常数τa有关。
下面分析电枢电流的过渡过程Ia=f(t)。
由运动方程可以得到

此式说明电枢电流由静态电流和动态电流两部分组成。静态电流和负载成比例,即IL=TL/C;动态电流和转速的导数(加速度)成比例。
由结构框图8-5可以得到电动机在输入量为电枢电压Ua,输出量为电枢电流Ia的传递函数

式中 IL——对应于负载转矩的电枢电流。
图8-7所示为电动机起动并达到稳定速度 时的过渡过程曲线。电动机轴上加有负载转矩TL。图8-7a是τm>4τa情况下的过渡过程曲线;图8-7b是τm<4τa情况下的过渡过程曲线。前者的电流和转速都是按指数规律变化的,后者的电流和转速都是按指数振荡规律变化的。从图中还可以看出:在t0时刻之前,对应于电磁转矩的电枢电流小于负载转矩的电流。虽然电枢电流在增加,但是转速为零;在t0时刻之后,电磁转矩的电流大于负载转矩对应的电流,电动机开始起动。随着电枢电流增大,电动机开始加速,在旋转电动势的作用下,电枢电流逐渐减小,转速逐渐稳定在稳态值。
时的过渡过程曲线。电动机轴上加有负载转矩TL。图8-7a是τm>4τa情况下的过渡过程曲线;图8-7b是τm<4τa情况下的过渡过程曲线。前者的电流和转速都是按指数规律变化的,后者的电流和转速都是按指数振荡规律变化的。从图中还可以看出:在t0时刻之前,对应于电磁转矩的电枢电流小于负载转矩的电流。虽然电枢电流在增加,但是转速为零;在t0时刻之后,电磁转矩的电流大于负载转矩对应的电流,电动机开始起动。随着电枢电流增大,电动机开始加速,在旋转电动势的作用下,电枢电流逐渐减小,转速逐渐稳定在稳态值。
下面分析直流电动机在电枢电压不变的条件下,机械负载对过渡过程的影响。图8-5是直流电动机在改变电枢电压进行调速的传递函数框图。现在保持电枢电压不变,考虑负载转矩发生变化对转速的过渡过程带来影响。这种情况的传递函数框图就是把图8-5变换成为如图8-8所示的形式,这时输入量是负载转矩TL,输出量是转速ω。
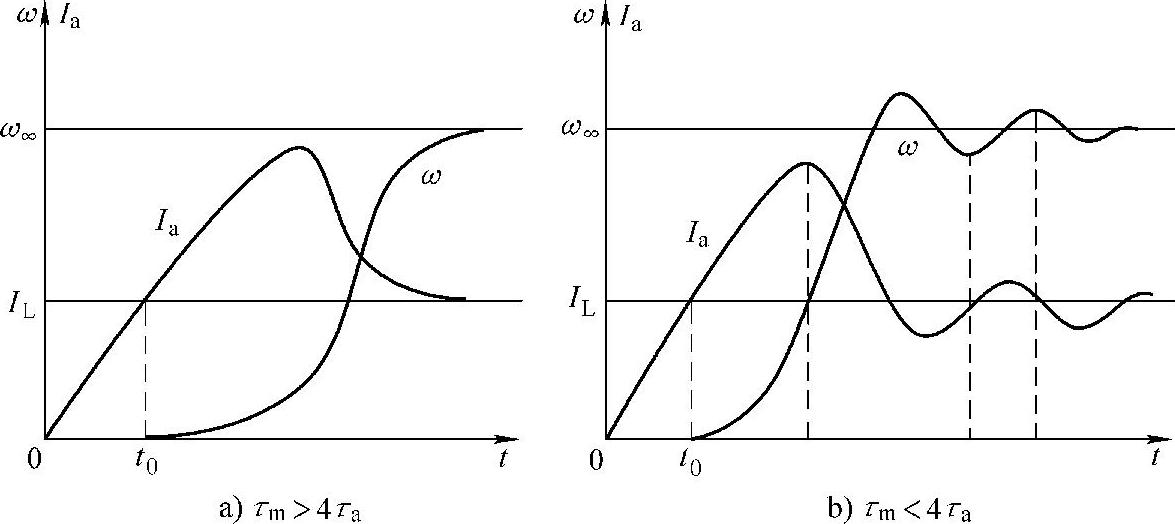
图8-7 电动机起动时电流和转速的过渡过程曲线
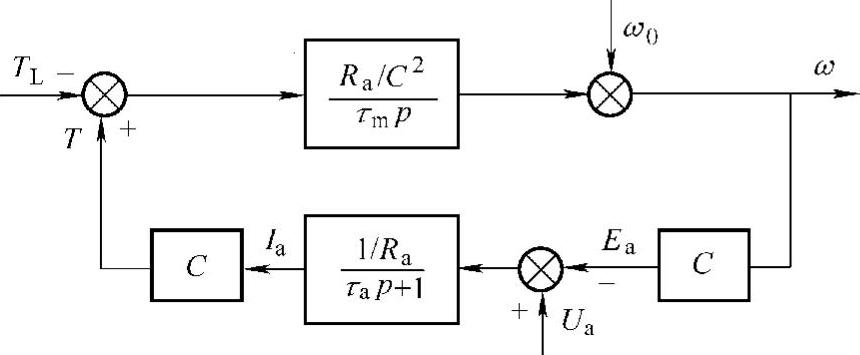
图8-8 恒定励磁的直流电动机在突加负载时的传递函数框图
假设电动机工作在空载状态TL=0,转速ω0=Ua/C,电枢电流Ia=0,根据电压平衡方程式有Ua=Ea。
如果在电动机轴上突加负载转矩TL=CIL,则电动机的转速开始下降,电动势也将减小,电枢电流则开始增加(见图8-9)。
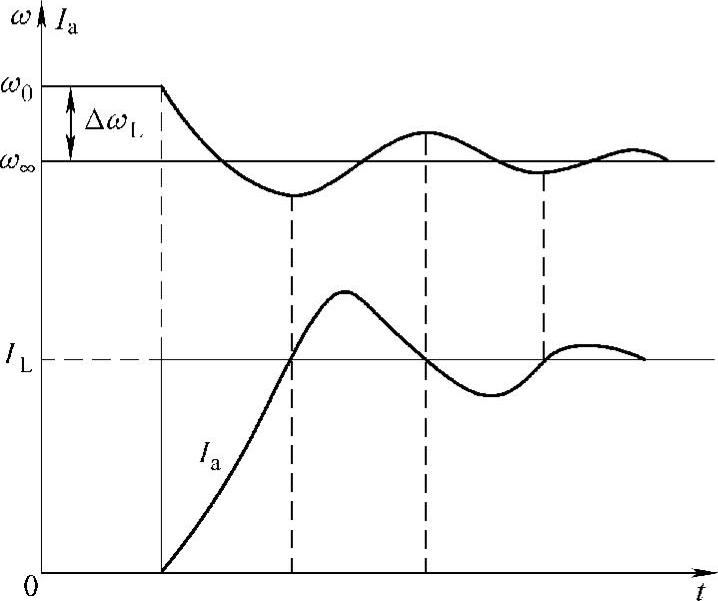
图8-9 突加负载时直流电动机的 电流和转速的过渡过程
如果电枢的电感足够大,满足条件τm<4τa,电枢电流上升的速率小于转速下降的速率。当转速开始小于新的稳态值ω∞=ω0-ΔωL=ω0-TL/β时,电流还没有达到对应于转矩TL的稳态值IL,所以转速将继续下降。当电枢电流继续增大到IL后,转速开始上升,经过几次振荡后,电流和转速达到稳定值。需要注意的是:曲线ω=f(t)和Ia=f(t)具有相关性,电流(或转矩)是转速的一阶导数,当转速ω在最大值和最小值的时刻,即dω/dt=0的时刻,正好对应着电流Ia穿过负载电流IL的时刻。
如果电枢的电感不满足条件τm<4τa,突加负载的过渡过程是一个单调变化的过程。当电枢电压恒定Ua时,把负载变化作为转速的扰动作用,其传递函数为(https://www.xing528.com)
经过化简后得到

式中 β——电动机机械特性的硬度,β=C2/Ra。
传递函数公式(8-28)表明,电动机轴上突然加上负载转矩TL,经过过渡过程之后将会产生稳态速降ΔωL,令微分算子p=0,可以得到
即稳态速降值与负载转矩成正比,与机械特性的硬度成反比。对于闭环控制的电气传动系统,β是指闭环后的机械特性硬度。
众所周知,采用速度闭环的控制系统可以提高速度调节的精度。带有速度闭环的晶闸管-直流电动机调速系统的传递函数框图如图8-10所示。速度调节器为放大倍数为ks的比例环节,晶闸管装置等效为放大倍数为kSCR的比例环节,速度反馈系数为kα。
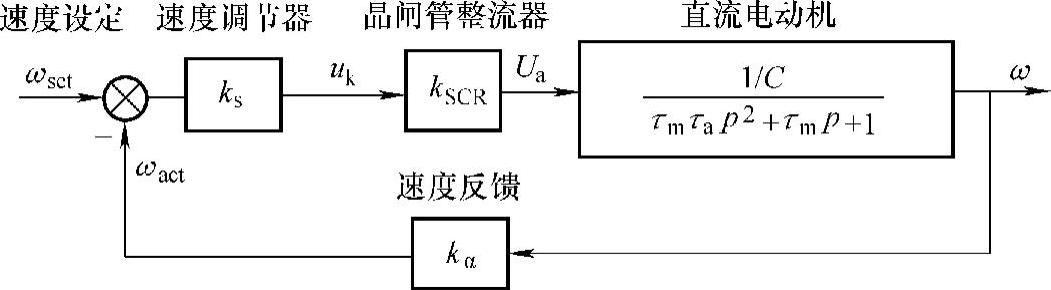
图8-10 晶闸管-直流电动机调速系统的传递函数
由图8-10可以得到速度闭环的传递函数
令闭环放大倍数K=(kskSCRkα)/C,上式可以简化为

式(8-29)的传递函数表明,在速度闭环的电气传动系统中,代表机械惯性大小的机电时间常数τm减小为原值的1/(K+1)。闭环控制后传动系统的机械特性硬度β增大为原来值的(K+1)倍(见式(4-8))。速度闭环控制的优点是提高了响应速度,而缺点是增强了过渡过程振荡特性。
通常电动机的机电时间常数τm>4τa,在开环控制的情况下过渡过程不会出现振荡现象。在实施速度闭环控制的情况下,等效的机电时间常数减小,而且很多时候闭环放大倍数K都很很大,等效时间常数往往小于4倍的τa,这就是过渡过程出现振荡的原因。为了抑制闭环控制所带来的振荡特性,需要在控制系统中加入校正环节,使过渡过程的指标达到要求。
如果描述系统的数学模型是线性(或者是经过线性化处理)的微分方程,一般采用如下的步骤分析其过渡过程:
(1)确认惯性环节的类型和数量;
(2)求出各个惯性环节的时间常数;在工程计算时可以把相差2个数量级以上的小时间常数忽略;
(3)惯性环节的数量就是描述过渡过程微分方程的阶数;
(4)列出特征方程(令微分方程的左侧部分等于零),并求出特征根;
(5)用单位阶跃给定函数或者单位阶跃扰动作为激励,求出响应的函数式y=f(t),y表示电气传动系统中的参数,一般指电流、转矩和速度。
例题8.2分析晶闸管—直流电动机调速系统的开环和闭环的过渡过程特性。
直流电动机的基本数据:额定电枢电压UN=220V,电枢电阻Ra=0.6Ω,电枢电感La=0.02H,电动机转矩常数C=1.9V·s,额定转速ωN=104.7rad/s(即nN=1000r/min),转动惯量JΣ=1.0kg·m2。系统的速度给定值ωset为0~10V,晶闸管整流器的控制电压uk为0~30V,整流器输出电压Ua为0~300V,速度反馈系数kα=0.09V·s。
解1.电枢回路的电磁时间常数
2.机电时间常数

3.开环时速度调节器的放大倍数

4.当晶闸管整流器的输出电压为220V时,其输入电压uk为

5.晶闸管整流器的放大倍数
6.闭环后晶闸管整流器的输入电压为

则闭环时速度调节器的放大倍数

7.总的闭环放大倍数

8.闭环时等效的机电时间常数

9.开环时
 即
即
这说明在开环控制时,过渡过程呈单调非振荡特性。
10.闭环时
 即
即
这说明在闭环控制时,过渡过程呈衰减振荡特性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。