



开关磁阻电动机(Switched Reluctance Drive,SRD)是继变频调速系统、无刷直流电动机调速系统之后发展起来的新一代无级调速电气传动系统。开关磁阻电动机兼有异步电动机和直流电动机的优点,应用在工业、牵引运输和家用电器等领域。这种系统是由磁阻电动机、功率变换器、转子位置检测器和控制装置四大部分所组成。图7-1所示为磁阻电动机的结构图。
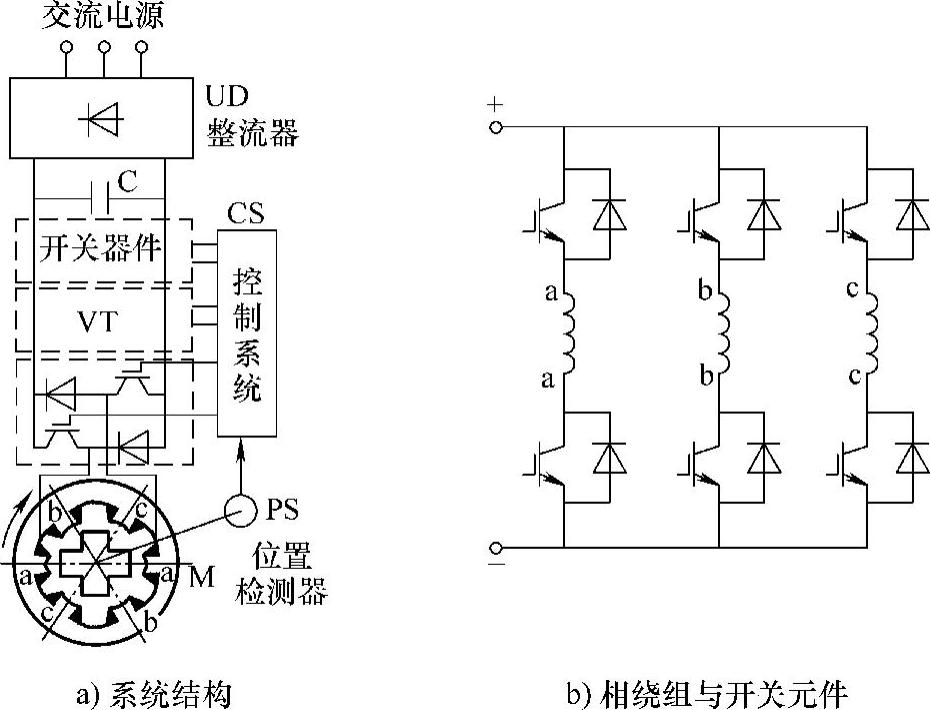
图7-1 磁阻电动机的结构图
磁阻电动机是利用磁阻最小原理,即磁通总是沿着磁阻最小的路径闭合,并由磁力带动转子转动。磁阻电动机的定、转子的凸极均由普通硅钢片叠压而成。定子极上绕有类似感应电动机的集中绕组,定子径向相对的两个绕组相连,成为“一相”。各相绕组依次通过直流电流形成旋转磁场。转子制成齿状,既无绕组也无永久磁体,只是被动地随着旋转磁场转动。磁阻电动机的定子齿数和转子齿数不相等,而且可以设计成多种不同齿数结构。如果齿数多、步距角小,有利于减少转矩脉动,但结构复杂,且主开关器件多,成本高。图7-1中示例的磁阻电动机的定子为6齿(3个相绕组),转子为4齿。
常用的相数、齿数、步进角的关系见表7-1。
表7-1 磁阻电动机相数、齿数和步进角之间的关系

磁阻电动机的功率变换器为电动机的定子相绕组供电,并且要根据转子的位置进行换流,因此转子上面必须装有位置检测器(PS)。
磁阻电动机的工作时轮流使定子绕组a-a,b-b,c-c通电,绕组产生的磁通力图通过磁阻较小的相邻齿隙形成闭合磁路。在电磁力的作用下,转子齿向定子齿靠拢而产生转矩,使电动机转动。随后再根据转子的位置改变定子绕组的导电通路,由于定子和转子的齿数不同,总会形成新的较小磁路的齿隙。于是像这样接连不断地改变导电绕组,形成连续的转矩。(https://www.xing528.com)
磁阻电动机的定子齿数和转子齿数不相等并且应为偶数,以避免可逆运行时产生不对称的电磁力。磁阻电动机的转矩方向与电流极性无关,只需要单方向的励磁电流。功率变换器中每相中的开关元件与绕组串联,不会出现普通PWM逆变器有同一桥臂短路的危险,线路简单,可靠性高。改变绕组通电的顺序,可以改变旋转方向,实现四象限运行,适于频繁起制动和正反向运行。
磁阻电动机的转速为

式中 fph——相绕组通电的频率;
Zr——转子齿数。
因为电磁转矩只和相绕组的电流的平均值有关,因此通过改变加到相绕组上的电压就可以调节转矩。图7-1所示的电路中,是通过加到相绕组的脉冲电压的占空比实现调压。磁阻电动机的可控参数多,调速性能好。控制开关磁阻电动机的主要运行参数和常用方法至少有四种:相导通角、相关断角、相电流幅值、相绕组电压。可控参数多,意味着控制灵活方便。可以根据对电动机的运行要求和电动机的情况,采取不同控制方法和参数值,即可使之运行于最佳状态(如输出功率最大、效率最高等),还可使之实现各种不同的功能的特定曲线。
开关磁阻电动机的本质是很容易实现无速度传感器控制的。特别是在低速时,由于凸极特性使绕组的电感发生很大的变化,很容易根据这一变化推算出转子的位置。开关磁阻电动机还可以利用逆变器进行弱磁运行。开关磁阻电动机的功率范围从数瓦到数百千瓦,转速可以达到6000r/min。适用于电动车辆、家用电器、以及各种恶劣环境的工业设备,是一种很有前途的电气传动方式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。