



串级调速的中电动机的转差能量只能单方向地由转子绕组流向电网。而绕线转子异步电动机的双馈调速是在转子回路使用交-交变频器(图6-33)。图中所示的是自控式的双馈调速原理,其主要特点是安装了转子位置检测器,根据转子位置来调节加到转子绕组上转子侧附加电压 电压的相位角。他控式的双馈调速不需要转子位置检测器。因为交-交变频器可以双方向传输能量,所以双馈调速中电动机的转差能量是双向流动的,既可以从转子绕组流向电网,也可以从电网流向转子绕组。而且双馈调速中的加到转子绕组的附加电压
电压的相位角。他控式的双馈调速不需要转子位置检测器。因为交-交变频器可以双方向传输能量,所以双馈调速中电动机的转差能量是双向流动的,既可以从转子绕组流向电网,也可以从电网流向转子绕组。而且双馈调速中的加到转子绕组的附加电压 既可以与转子电动势相位一致,也可以相差一个角度(π-δ)。在大多数情况下,通过交-交变频器加到转子绕组的电压为
既可以与转子电动势相位一致,也可以相差一个角度(π-δ)。在大多数情况下,通过交-交变频器加到转子绕组的电压为

电流由转子回路的电压方程确定

式中 E20——转子开路感应电动势;
E2=E20s——转差率为s时的感应电动势;


图6-33 绕线转子异步电动机的双馈调速原理图
将 展开成为转子的有功分量I2a和无功分量I2r(相对于转子感应电动势):
展开成为转子的有功分量I2a和无功分量I2r(相对于转子感应电动势):


转子电流的有功分量决定了电动机的电磁转矩和机械功率:
PM=Tω0(1-s) (6-29)
转子电流的无功分量决定了流动于转子和定子之间的无功功率。
双馈调速的异步电动机的空载转速(或空载转差率s0)与加到转子绕组的电压的幅值和相位有关,即

公式(6-28)表明:独立地调节转子侧附加电压 的幅值和相位角δ,就可以控制双馈调速电动机的有功功率和无功功率。或者说,在转差率不变的情况下,如果负载(即I2a)发生变化,只要按照适当的规律调节
的幅值和相位角δ,就可以控制双馈调速电动机的有功功率和无功功率。或者说,在转差率不变的情况下,如果负载(即I2a)发生变化,只要按照适当的规律调节 和δ,就可以保持无功电流I2r不变。由式(6-28)还可以知道:若
和δ,就可以保持无功电流I2r不变。由式(6-28)还可以知道:若 和δ取适当的值,当转差为正值(0≤s≤1)时,转子电流的有功分量可能出现负值;当转差为负值时,转子电流的有功分量可能出现正值。这说明双馈调速的异步电动机在亚同步速度时,可以工作在发电工况;在超同步转速时,可以工作在电动工况。这一点和普通的异步电动机不同,也和串级调速的特性不同。
和δ取适当的值,当转差为正值(0≤s≤1)时,转子电流的有功分量可能出现负值;当转差为负值时,转子电流的有功分量可能出现正值。这说明双馈调速的异步电动机在亚同步速度时,可以工作在发电工况;在超同步转速时,可以工作在电动工况。这一点和普通的异步电动机不同,也和串级调速的特性不同。
双馈调速的异步电动机在亚同步速度电动工况时的能流图和串级调速的能流图相同。亚同步速度发电工况的能流图如图6-34a所示;超同步电动工况的能流图如图6-34b所示。现对这两种工况的能流图做简单的解释。(https://www.xing528.com)
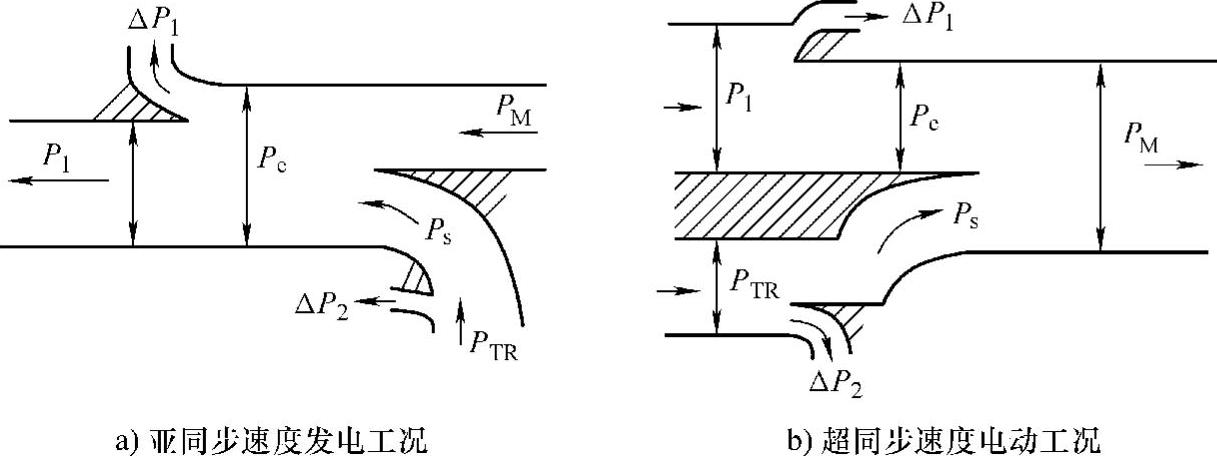
图6-34 双馈调速的能流图
亚同步速度发电工况时,制动的机械功率PM不足以建立电磁功率Pe,因此,电网通过转子侧的交-交变频器向转子馈入其余部分的功率,这部分功率比正比于转差率,即Ps=Tω0s。机械功率和转差功率之和是电磁功率,即PM+Ps=Tωs=Pe。从定子侧回馈到电网的功率是P1,考虑到转子侧还有通过变压器和变频器由电网馈入的功率PTR,真正回馈到电网的功率是P1-PTR。
超同步速度电动工况时,电磁功率由定子侧的输入功率P1建立。转差功率Ps通过变压器和变频器由电网馈入到转子侧。机械功率是电磁功率和转差功率之和,即PM=Pe+Ps。因为机械功率大于电磁功率,转子侧馈入的转差功率保证了电动机在超同步速度时的功率需求。当负载转矩为T时,超同步速度电动工况的能量关系式为
P1+PTR-(ΔP1+ΔP2)=Tω0(1+s)=PM应当注意,这种工况下转差率是负值,电动机发出的转矩是电动转矩。
转子电动势和电流的频率总是等于转差频率,即f2=f1s,因此转子附加电压 的频率也要与等于转差频率。根据变频电源频率控制方法不同,可以把双馈调速分为他控式和自控式两种频率控制方式。
的频率也要与等于转差频率。根据变频电源频率控制方法不同,可以把双馈调速分为他控式和自控式两种频率控制方式。
在他控式工作方式中,变频器的频率是独立控制的。变频器的每一个确定的频率都对应着电动机的一个确定的转速。他控式工作方式具有同步电动机的特点,与同步电动机不同之处在于转速可以调节。f2=0是他控式双馈调速的特殊频率点,即是传统意义上的同步电动机特性。
在自控式工作方式中,变频器的频率是根据电动机的转速状态自动控制的。这个频率要随时跟踪电动机的转差频率,需要在电动机轴上安装转子位置检测器(也称为差频信号检测器),实现频率和相位控制。自控式工作方式具有异步电动机的特性,与异步电动机的不同之处在于定子侧的无功功率是可以调节的,甚至对于电网呈现容性。
双馈调速可以在电动机的同步转速ω0上下调节转速。最大调速范围是由转子侧变频器的两个参数确定:f2·max和U2·max,即
最大转差率的绝对值等于

由于双馈调速多采用交-交变频器为转子供电,而交-交变频器最大的输出频率为20Hz,所以最大转差率s0·max=0.4,最大调速范围为Dmax=(1+0.4)/(1-0.4)≈2.3∶1。
自控式双馈调速异步电动机的机械特性如图6-35所示,图中的ε=U2/E2N是转子附加电压的相对值。双馈调速的异步电动机起动方式和串级调速的电动机起动方式相同。
串级调速和双馈调速的主要优点是效率高。因为通常调速范围不大于2∶1,所以转子侧变频器和变压器的功率只相当于电动机功率的一半,性能价格比很好。
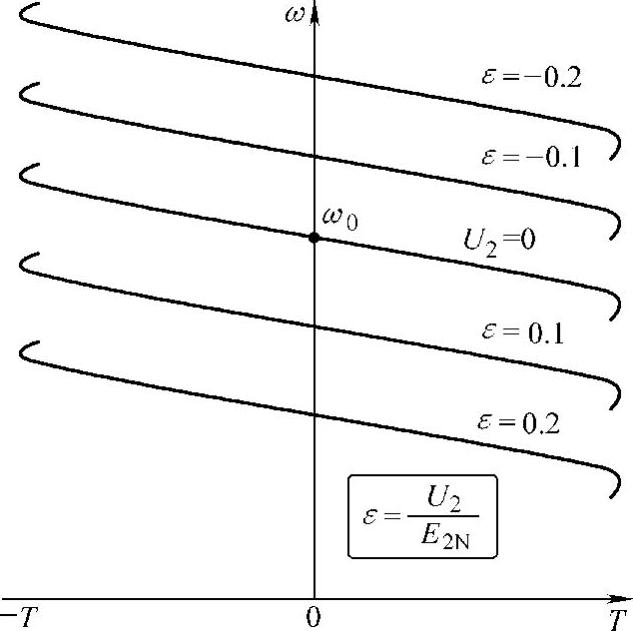
图6-35 自控式双馈调速异步电动机的机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。