



绕线转子异步电动机的串级调速和双馈调速的原理是在旋转磁场转速不变的情况下,改变转差的调速方式。在这两种调速方式中,电动机的定子绕组直接接到电网,为了把转子侧的转差功率有效地利用起来,需要在转子回路中引进一个附加的电动势。
利用转差能量的难点在于转子电动势E2和转子电流I2的频率是转差频率,这个频率随着转速变化。如图6-28所示,在串级调速方式中,在绕线转子异步电动机的转子回路接入不可控的整流器UD1和逆变器UD2,并通过逆变器UD2引进直流的附加电动势。变压器TR负责协调电网电压和转子电压。在控制系统的控制下,感应到转子回路的转差能量整流成为直流电流并通过逆变器回馈电网。由于整流器和逆变器是以级联方式串联在转子回路中,所以称之为串级调速。描述串级调速的能量关系的能流图如图6-29所示。
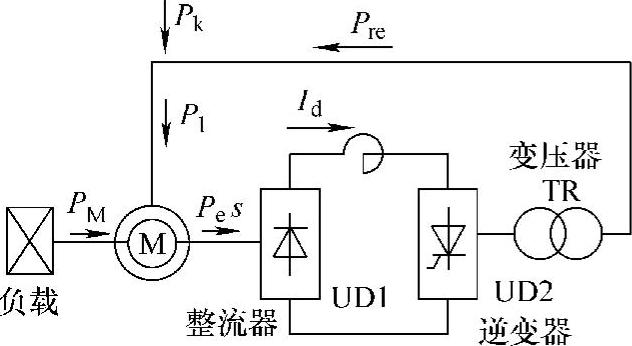
图6-28 绕线转子异步电动机串级调速的原理图
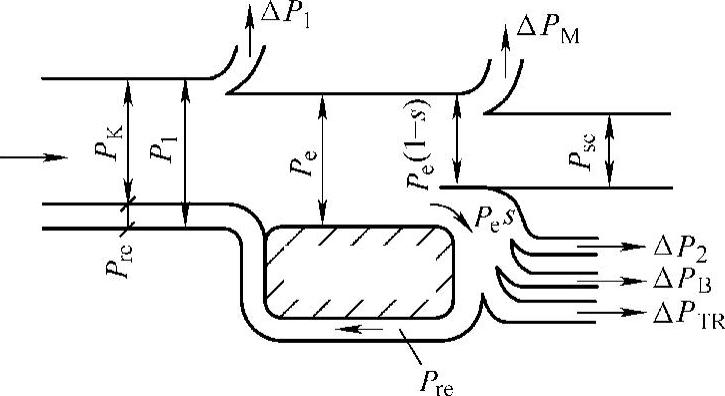
图6-29 绕线转子异步电动机串级调速的能流图
由能流图可以看出,电网提供的有功功率PK与逆变器返送到电网的功率Pre共同构成定子的输入功率P1。从P1中扣除定子回路的损失ΔP1(包括定子的铜损和铁损)之后,剩余部分转换成为旋转磁场的电磁功率Pe。电磁功率Pe分为两部分:作用在电动机轴上的机械功率PM和以变压器形式传送到转子绕组的转差功率Ps。转差功率扣除转子回路的损失,其中包括转子绕组、整流器、逆变器和变压器的损失,剩余的部分Pre回馈到电网。而从机械功率PM减去机械损失ΔPM后,剩余的部分就是电动机轴上输出的功率Psc。整个电气传动系统消耗的功率为P1-Pre。由此可见串级调速的效率很高。
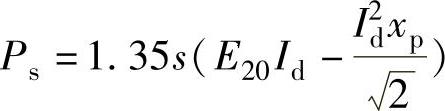
整流后的转差功率为
Ps=(1.35sE20-ΔUγ)Id (6-19)
式中 E20——转子额定线电动势(s=1时);
Id——转子侧整流器的整流电流;
ΔUγ——整流器中晶闸管换相的电压降。

式中 xp=xk/k2T折算到转子侧的绕组漏抗。
把式(6-20)代入式(6-19)得到
因为异步电动机的转矩为

在转矩小于额定转矩时,可以近似认为电磁转矩和整流电流Id成正比。当转矩增大乃至超过额定转矩时,考虑到式(6-21)中的第二项,转矩和Id就不成正比关系了。
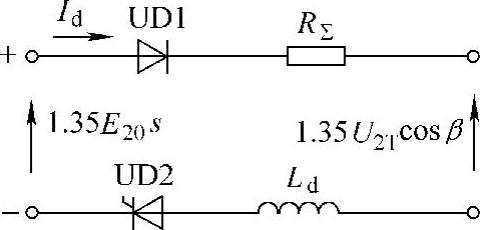
图6-30 绕线转子异步电动机串级调速时转子回路的等效电路图
由串级调速时转子等效电路图6-30可知,转子整流电流Id的值取决于整流的电动势Edr和逆变器电动势Edi的差值,还和转子回路的等效电阻RΣ有关,其表达式为

式中 U2T——变压器二次侧线电压;
β——逆变器中晶闸管的触发角,β=π-α(α≥π/2); 2r2+2r′1s+rd+2x2T,
2r2+2r′1s+rd+2x2T, 和
和 分别是整流器和逆变器中晶闸管换相的等效电阻。
分别是整流器和逆变器中晶闸管换相的等效电阻。
由式(6-22)可知,调节逆变器的触发角,就调节了转子电流Id的值,也就是调节了电动机的转矩值。
如果sE20=U2Tcosβ,则转子电流和转矩将等于0。这时的转差率就是串级调速的空载转差率s0,其值为 (https://www.xing528.com)
(https://www.xing528.com)
这个公式说明只要改变逆变器的触发角β,就能调节电动机的空载转差率s0。
最大空载转差率的值取决于最大的逆变电动势的值,而最大逆变电动势的值由最小逆变触发角βmin所决定,一般βmin=15°。所以

把式(6-22)稍加变换并考虑到式(6-23),可以得到

通过联立求解式(6-21)和式(6-25),并且忽略电子电阻r1,就可以得到串级调速的机械特性表达式。

式中 r2∗=RΣ/xp,转子回路等效电阻的相对值。
异步电动机在自然特性时的临界转矩为
所以机械特性公式(6-26)可以写成相对值的形式:
T∗=3.82λAs(1-As) (6-27)
式中 。
。
串级调速的机械特性如图6-31所示。
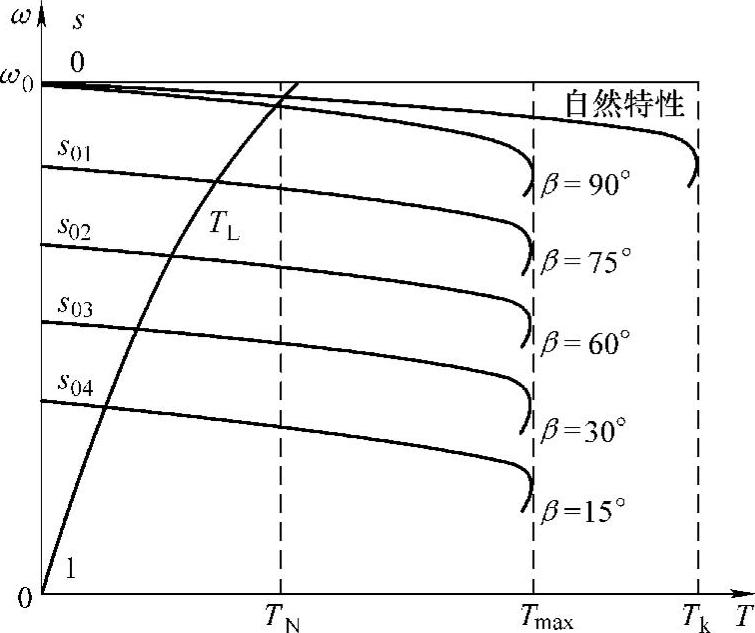
图6-31 异步电动机串级调速的机械特性
串级调速的机械特性是一族随着逆变器的反电势增加而平行下移的曲线,具有很高的硬度,略比自然特性稍微软些。式(6-26)和式(6-27)的适用范围是在转矩小于0.72Tk的区间,这是因为转子电流的波形是非正弦波,所以串级调速的过载能力比自然特性时减小17%,即Tmax=0.83Tk。
速度调节的原理说明如下。如果逆变器的触发角β=90°,逆变器的反电动势Edi=0,相应的机械特性在最上方。如果这时电动机轴上加有负载转矩TL,就应当减小逆变器的触发角β(例如减小到60°)增大反电动势,并使之大于整流侧的电动势Edr。这样就使转子逐渐电流减小直至为零(因为使用的是不可控整流器,电流不能为负),电动机的转矩也变为零。在负载转矩的作用下,电动机的转速下降,转差率增大。随着转差率增大,转子的电动势也增大。当这个电动势开始大于s02时,转子回路开始流过电流,电动机工作在s02的机械特性曲线上。这时的转差率值由负载负载特性曲线和机械特性曲线的交点处确定。为了进一步降低转速,就应当进一步增加逆变器的反电动势,即进一步减小逆变器触发角β。
为了提高速度,就应当减小逆变器的反电势Edi,转子电流和转矩随之增加,电动机的速度增加。由于电动机速度增加,使得转子电动势、转子电流和转矩都逐渐减小,直至电动机的转矩与负载转矩相平衡时,加速过程结束。
调速的深度由变压器电压U2T与最大转差率s0·max之比值决定(见式(6-24))。这种特性决定了串级调速最适合用于调速深度低于50%的机械,例如某些高速线材的精轧机或者风机、水泵类机械的传动。这样做的好处是使逆变器和变压器的容量只是电动机容量的一半左右,降低了设备的成本。
可以用下式估算逆变变压器的容量
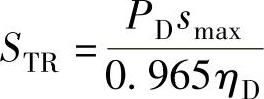
式中的下标TR和D分别表示变压器和电动机。
串级调速需要解决起动到最低工作速度的问题,最常用的方法是采用起动电阻。具体的起动电路如图6-32所示。合闸接触器KM1(这时KM2分断),接通起动电阻使电动机起动并加速。当电动机的转速略高于ω0(1-s0·max)时,接通KM2,然后断开KM1,电动机切换到串级调速工作方式。
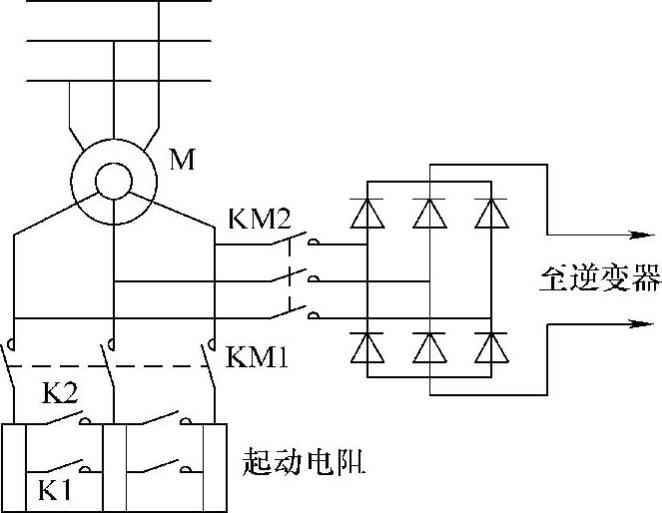
图6-32 串级调速的起动电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。