



交-直-交变频器是带有中间直流环节的变频器,其框图见图6-15。
交-直-交变频器中逆变回路中开关元件可以采用GTR、IGBT、IGCT、IEGT等具有关断能力的半导体元件,也可以使用无自关断能力的晶闸管,二者的电路原理、控制方式均有所不同,故分别叙述。这一节讲述具有关断能力的交-直-交变频器驱动笼型异步电动机的原理和应用。
整流回路把工频电压通过可控或不可控整流变成直流电压,再通过逆变单元把直流电压变换成为频率、电压(或电流)均可调节的电源。中间的直流回路可以采用电容器滤波或电感滤波,前者称为电压型变频器,后者称为电流型变频器。电压型变频器应用的较普遍。
脉宽调制变频器(PWM变频器)是最为通用的变频器。这种变频器多采用不可控整流器,直流环节的电压值是不可调节的,逆变单元利用脉宽调制的原理实现同时实现电压和频率调节。

图6-15 交-直-交变频器的框图
当电动机工作在发电工况时,逆变电路工作在整流状态,把电动机的能量送到直流回路。如果是可控的整流电路可以把直流回路的能量送回电网;如果是不可控的整流回路,需要在直流回路加设制动单元和制动电阻。
按照逆变回路电平数不同,可分为:两电平、三电平、多电平变频器。
(1)两电平变频器:两电平变频器的典型电路和输出的线电压波形如图6-16。假设整流器输出的直流电压为E,直流母线的中点为参考电位,由于逆变侧同一桥臂上的晶体管不能同时导通。因此每个桥臂的输出电压只有两个状态,+E/2和-E/2。但是对于变频器的线电压而言,存在着+E、-E、0三个电平状态。
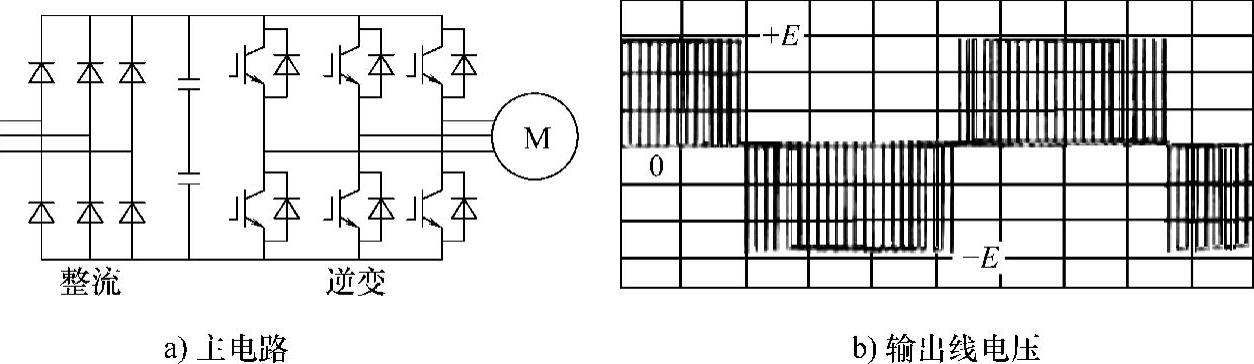
图6-16 两电平变频器的主回路和输出线电压的波形
两电平变频器产品大量应用于通用异步电动机,电压等级为380V和690V为主。国外的产品如西门子公司的6SE70、MM440、S120等系列,ABB公司的ASC600、ASC800等系列占有高端控制方式的主要市场。国产的两电平变频器开始替代进口的变频器。
(2)三电平变频器:三电平PWM电压型变频器的逆变桥中采用12只IGBT晶体管和6只钳位二极管构成带有中性点的逆变电路(见图6-17)。在同一个桥臂中,开关元件的开关状态如表6-3所示。由开关表可知,同一时刻总是有两个元件导通,V1和V3开关状态互补,V2和V4的开关状态互补。假设每个整流桥输出的直流电压为E,直流母线的中点为参考电位,则每相对中点Z的输出的相电压有+E、-E、0三个电平状态,故称为三电平变频器。与两电平变频器相比,因输出的电平数增加,波形更加接近正弦波。而三电平变频器输出的线电压是两个相电压之差,具有+2E、+E、0、-E、-2E五个电平状态(见图6-18)。
表6-3 三电平逆变器的开关表


图6-17 三电平变频器的主电路
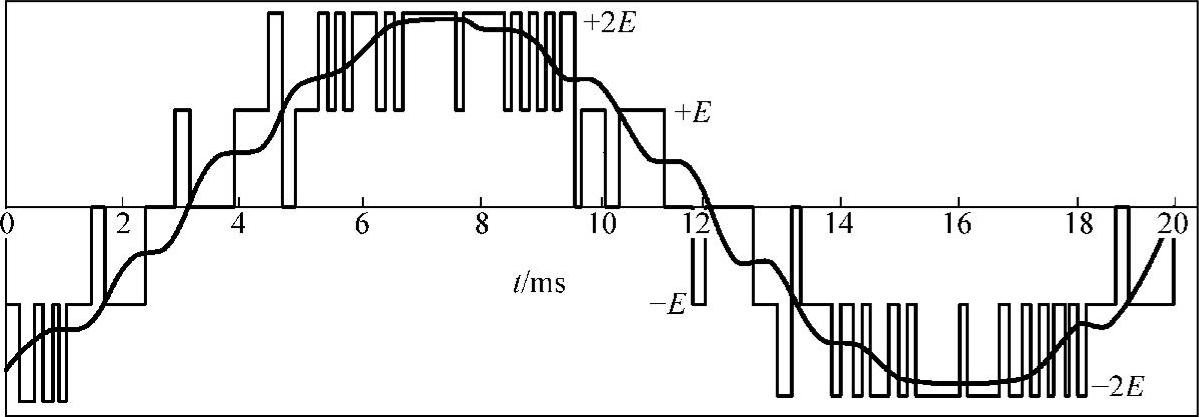
图6-18 三电平变频器输出线电压的波形
因为输出的线电压为5个电平的跳变,跳变的台阶为E,dv/dt较大,谐波失真率达到29%,电流失真率可以达到17%。为了减小谐波的影响,不使过大的dv/dt影响电动机的绝缘,在逆变器输出侧加装了电感-电容滤波器。
为了实现能量回馈和改善电网侧能量指标,有些三电平变频器输入侧采用可控PWM整流,其优点是输入谐波低、输入功率因数可调、电动机调速动态性能提高,缺点是装置成本增加。
三电平变频器输出电压和现有的电动机标准电压不甚匹配,主要应用范围在一些特种领域,如轧钢机、轮船驱动、机车牵引、提升机等,以为这些领域的电动机都是特殊定制的,电压可以不是标准电压。
西门子公司的SIMOVERT MV系列变频器和ABB公司的ASC1000、ASC6000是典型的三电平变频器。国产的类似产品也正在相继问世。
(3)多电平变频器:当交流电动机的端电压在6~10kV范围时,变频器常常采用多电平的形式。变频器由多个低压的功率单元串联而成,每个功率单元做到最大限度利用半导体开关元件的电压能力(IGBT元件为690V)。每个功率单元为三相独立变压器输入,变压器采用移相方式,减少对电网侧的谐波污染。多个功率单元的输出相串联,成为的单相输出电源。三个这样的单相电源构成三相变频电源(见图6-19)。在输出高电压的同时,输出电压具有更多的电平,波形更加接近正弦波(见图6-20)。
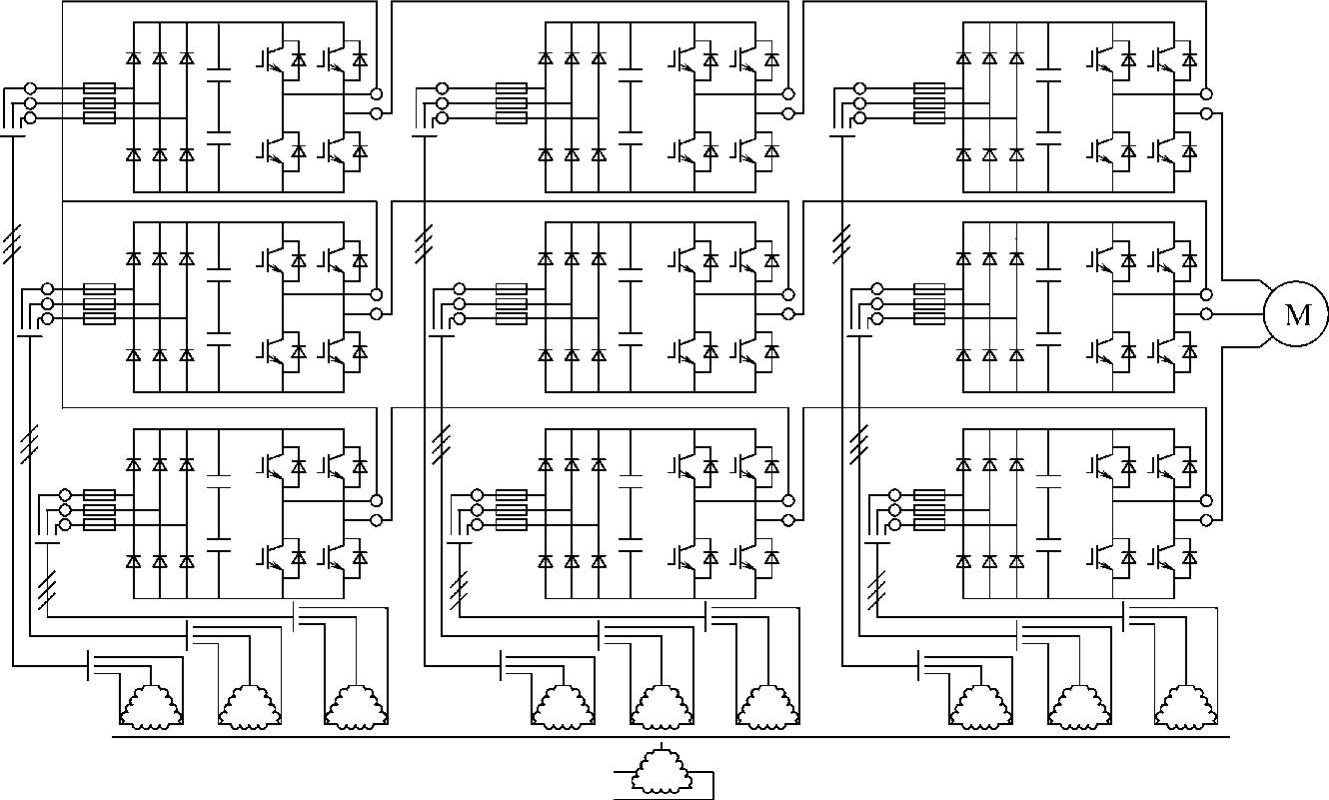
图6-19 多电平变频器的主电路
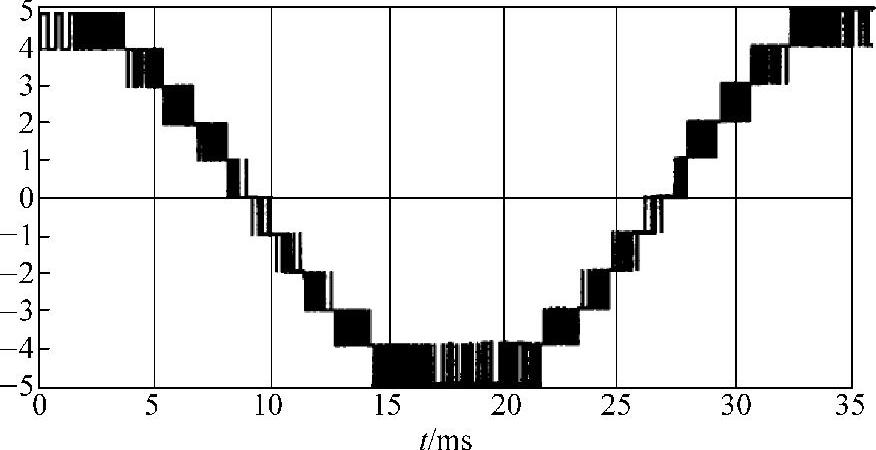
图6-20 多电平变频器的输出电压波形
多电平变频器对于电网来说可以做到几乎无谐波影响,输出电压可适用于各种高电压等级的电动机。另外在可靠性方面,也具有优势,如果某个功率单元出现故障时,可使其退出工作,利用其余的功率单元继续工作。多电平变频器本质上是把普通两电平变频器做成功率单元,根据电压等级串联使用,把高压变频器的技术难点通过干式进线变压器化解,同时带来谐波小、电平多、可靠性高等正面效果。目前国产的高压多电平变频器已经占据了大部分高压异步电动机调速的市场,主要是针对风机水泵类负载节能的应用,在可靠性、操作性等方面,已经超过进口产品。
按照控制方式不同,变频器可分为:V/F控制、矢量控制、无速度传感器的矢量控制、直接转矩控制等。
(1)V/F控制(压频比控制):交流电动机的电磁关系为
E=4.44fwΦ
式中 E——电动机电动势;
f——电源频率;(https://www.xing528.com)
w——绕组匝数;
Φ——气隙主磁通。
对异步电动机调速时,希望气隙主磁通Φ恒定。对于特定的电动机,绕组的匝数w是不变的。所以从公式E=4.44fwΦ可以看出,只要保持E/f为常数,Φ就基本恒定,就可以实现恒转矩调速。由于E不易直接检测,常用定子电压U代替。U和E之间相差定子漏抗电压降,在频率较高时定子漏抗电压降的影响不大;在频率较低时,影响不可忽略。在低频时要适当提升定子电压,以保证气隙磁通恒定。
如果频率超过电动机的额定频率,电压降达到最大值,所以在基频以上无法保证压频比恒定。随着频率f增加,气隙磁通逐渐减弱,在同样电流的条件下,输出转矩与频率成比例减小,速度和转矩的乘积不变,这就和直流电动机弱磁调速一样,成为恒功率调速。
V/F控制属于标量控制,只控制电流的大小,不控制其方向,性能一般,适用于对动态性能要求不高的场合。但V/F控制不依赖电动机参数,适合于多电动机传动,比如多台电动机并联运行或对台电动机切换运行方式。
(2)矢量控制:直流电动机具有电枢绕组和励磁绕组,二者可以单独控制。电枢电流是通过换向器和流入电枢绕组,在空间上保证了电枢电流与气隙磁通相互正交,产生的电磁转矩最大。直流电动机的结构使得电枢电流和励磁电流天然解耦,具有良好的转矩控制特性。
三相异步电动机和直流电动机不同,它没有专门的励磁绕组。转矩电流和励磁电流都是由定子电流提供的,二者耦合在一起构成总的定子电流。如果只是简单地控制定子电流的大小,电动机的磁场和转矩总在改变,无法实现良好的转矩控制特性,调速性能也不理想。
在交流电动机控制上引进直流电动机的控制思想,把定子电流分解成为与气隙磁通相一致的励磁分量以及与之正交的转矩分量,实施单独进行闭环控制。这样交流电动机的调速性能就能达到直流机的水平。当然,最终控制的结果终归要落实到电动机的三相电压上,而这个电压的幅值、频率、相位都跟随转矩分量和励磁分量的调节。也就是说,实施矢量控制的结果,使得最终输入到定子上的三相电压能够产生希望的定子电流,这个定子电流的转矩分量和励磁分量是我们预期的结果。
矢量变换的数学运算的核心是坐标变换把静止坐标轴系上的物理量变换到转速为ω0的转子磁通坐标轴系上,以及相反的坐标变换。从数学意义上来说,就是坐标轴系的旋转变换;从物理意义上来说,就是在转速为ω0的坐标轴系上来看,交流量变成了直流量,对直流量实施闭环调节后,再反变换成为静止坐标轴系上的交流量,经变频器功率放大后加到异步电动机的定子绕组。
矢量控制技术实现了对交流电动机转矩和磁通的单独控制,调速精度高,动态响应快,在高速和低速的情况下,都有良好的控制性能。
由于矢量控制需要检测电动机的电压、电流,然后通过电动机的数学模型计算转子磁通。而异步电动机的参数随着频率变化,必须实时知道电动机的参数,因此其控制精度受电动机的参数影响较大。多数情况下,调速系统和电动机采用一对一的方式。不宜用一台变频器控制多台电动机。另外,需要增加电压、电流的检测装置。在速度闭环的情况下,一般需要使用测速装置(测速机或编码器),才能达到较好的速度控制特性。图6-21所示为典型的异步电动机矢量控制原理框图。
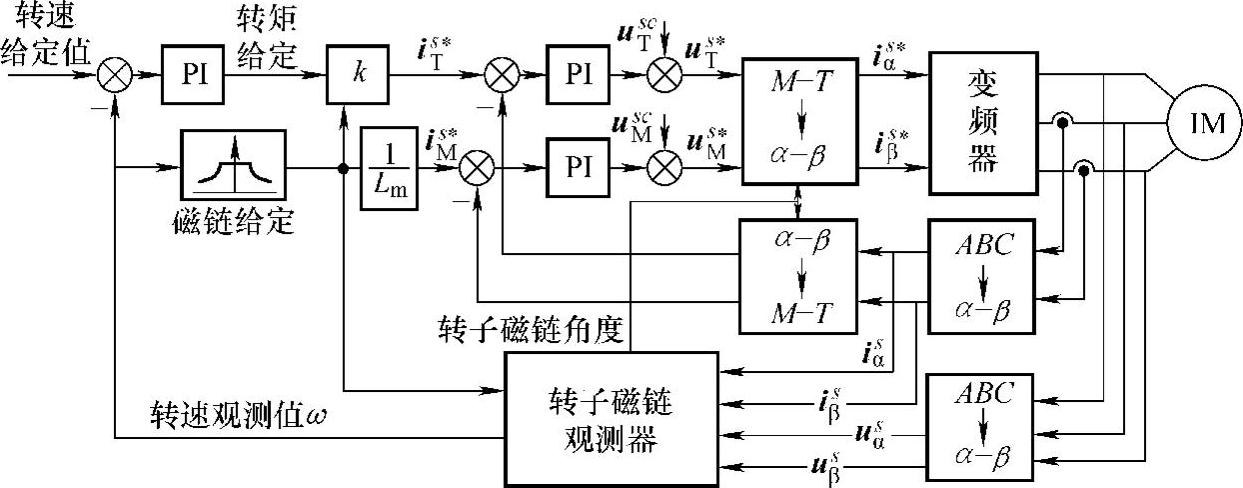
图6-21 典型的异步电动机矢量控制原理框图
(3)无速度传感器的矢量控制:严格说来,无速度传感器的矢量控制方法属于速度控制的范畴,而矢量控制的本质是控制定子电流的转矩分量和励磁分量,而速度环是转矩电流的外环,有无测速传感器并不影响电流的矢量控制。高性能的交流矢量控制系统需要安装速度传感器(测速机或编码器),才能保证良好的调速性能。有的场合对调速性能要求不高,或者无法安装测速装置,可以仿照直流调速系统中的利用电枢电动势代替速度反馈值,可以省去测速装置,简化系统结构。
异步电动机的定子电动势es不能直接作为转速反馈的替代量,必须把es在φ2轴(见图6-22)上的分量esφ2作为速度反馈的替代量。电动机空载时, 与φ2轴重合;电动机加载时,在动态过程中es偏离φ2轴;当加载后速度稳定下来,
与φ2轴重合;电动机加载时,在动态过程中es偏离φ2轴;当加载后速度稳定下来, 再度和φ2轴重合。当
再度和φ2轴重合。当 和φ2轴不想重合时,
和φ2轴不想重合时, 在φ1轴上的分量
在φ1轴上的分量 ,把
,把 的积分值用来校正
的积分值用来校正 ,准确计算动态过程中的转速反馈值。值得注意的是在低速时积分的误差较大,切除校正环节,直接采用
,准确计算动态过程中的转速反馈值。值得注意的是在低速时积分的误差较大,切除校正环节,直接采用 作为速度反馈值。
作为速度反馈值。

图6-22 异步电动机加载过程
现在的学术界提出很多估算电动机速度辨识方法,主要有利用电动机方程直接计算法、模型参考自适应法、扩展卡尔曼滤波法、定子侧快速傅里叶分析法、非线性法等。这些方法基本上都要估算同步速度和转差速度,以此求出电动机的转速。由于依赖于电动机的参数,当工作频率变化、温度变化时,电动机的参数随之变化导致速度估算值失准。于是又需要在此基础之上对电动机参数实施辨识,使速度估算系统过于复杂,失去实用价值。对于普通的设备,工程上的做法是:在调速精度要求较高的情况下,采用编码器作为速度反馈,在调速精度要求不高的情况下,可以采用简单的定子电动势esφ2分量作为速度反馈。利用定子电动势作为速度反馈值的方法不能用于弱磁调速控制,这是因为弱磁后的定子电动势不随速度而改变的缘故。
(4)直接转矩控制:直接转矩控制不是通过间接控制电流、磁通链等变量来控制转矩,而是把转矩直接作为被控量来控制的。直接转矩控制的特点是以定子磁通链为定向矢量,把定子电流分解为转矩分量和励磁分量。定子磁通链ψ 的大小和旋转角度受定子电压控制,并且受电流影响。
的大小和旋转角度受定子电压控制,并且受电流影响。
在直接转矩控制系统中,也分为转矩通道和励磁通道,转矩、磁通链的检测也和矢量控制系统的检测方式类似。直接转矩控制和矢量控制所不同之处主要有两点:一是直接转矩控制是以定子磁通链作为定向矢量,不像矢量控制那样以转子磁通链作为定向矢量,这样就避开转子参数随频率变化对计算磁通链的影响;二是直接转矩控制根据转矩调节器和磁通链调节器的输出量,直接计算出与定子电压相关的逆变器的开关空间矢量状态(开关函数),而不像矢量控制那样经过旋转变换成为三相交流量,经过电流调节后与三角波比较后生成PWM开关状态,这样就简化了控制系统。
这里所说的开关空间矢量是指逆变器中六个半导体开关元件的导通/关断的状态。在普通的180°两电平的逆变器中,同一桥臂上下两个开关管的动作是互补的,所以桥臂的中点对地电压只能取两个值:Ed/2和-Ed/2。可以用开关函数的形式表示加到电动机的空间电压矢量:

式中的e指数因子表示直流脉冲电压加到不同相的绕组上所产生的空间磁场的效应。
式中 sa、sb、sc开关元件的状态,它们具有两种状态:sa=1,表示A桥臂的
上开关元件导通;sa=0,表示A桥臂的下开关元件导通,其
余依次类推。
所以us有23=8个状态值,即(0,0,0)~(1,1,1,)。其中(0,0,1)~(1,1,0)为非零矢量,而(0,0,0)和(1,1,1,)分别表示A、B、C三相下桥臂或上桥臂同时导通,相当于把开关元件把电动机的三相绕组短接,电动机端子相当于加上了零电压,故称之为零矢量。在以α轴为实轴、β轴为虚轴的平面上,以开关函数表示的电压矢量如图6-23所示。
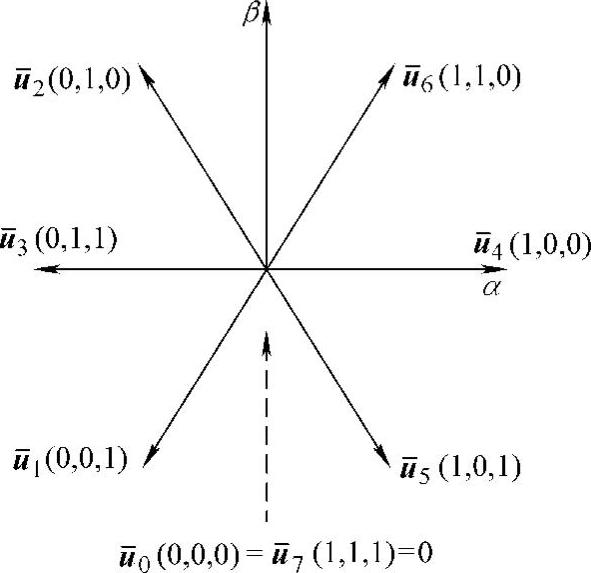
图6-23 用开关函数表示的电压矢量图
根据计算得到的电压矢量推算出开关元件的导通状态和导通时间,据此驱动开关元件。这就是直接转矩控制的第二个要点。
图6-24是直接转矩控制的原理框图,与矢量控制的框图6-21相比较,可以看出二者的差别。
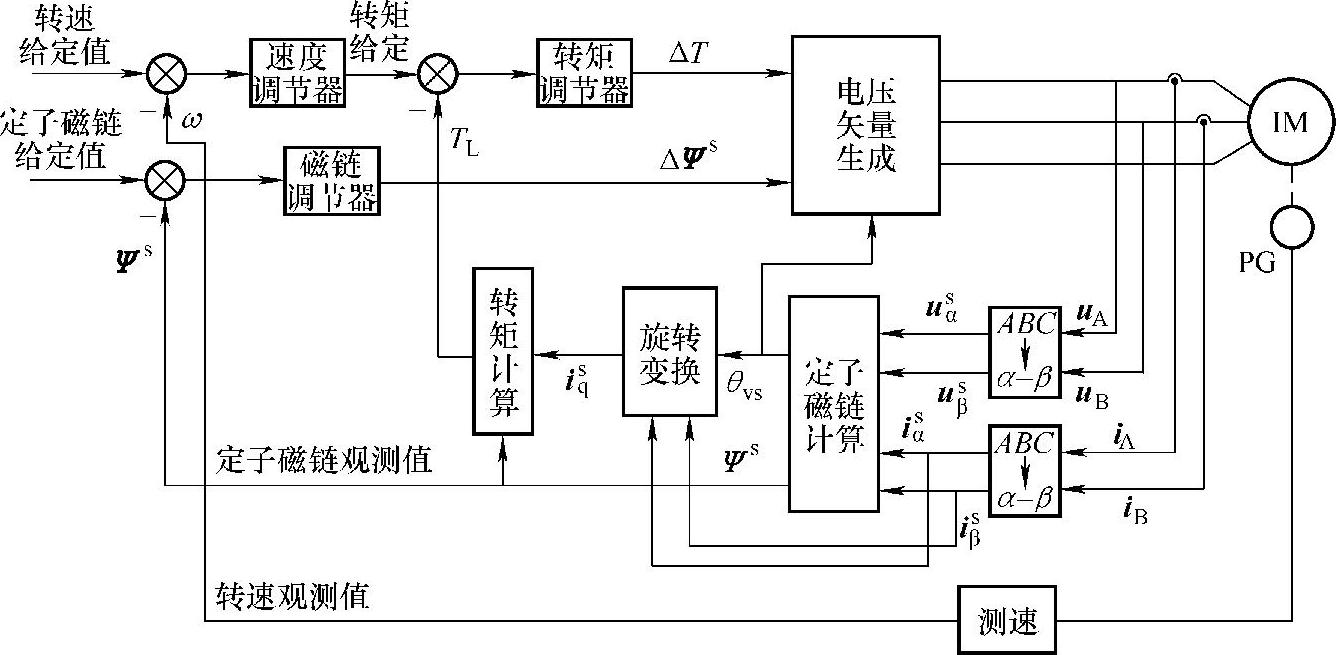
图6-24 异步电动机直接转矩控制原理框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。