



功率半导体技术的发展,特别是绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)的发展,为直流电动机开辟了新的调速方向。直流电动机脉宽调制(Pulse Width Modulation,PWM)调速技术就是其中的一种。脉宽调制调速技术适用于城市电车、地铁、电动汽车和电瓶车等采用公共直流电源或由蓄电池供电的直流电动机。
IGBT的主要优点是功率参数高,耐压高达1500V,工作电流可达500A,易于并联使用;控制功能好,驱动功率低,开关频率可达数十千赫兹;IGBT具有模块化结构,由一个晶体管、一个快速续流二极管和驱动保护电路构成。这种理想的开关元件适用于高频开关电路。
直流电动机电压型脉宽调制电气传动的原理图如图5-25所示。电源侧一般采用二极管不可控整流,这对改善电网功率因数和减少谐波都是有利的。
这种调速方式中整流器输出固定电压Ud,电动机的电枢周期性地接到整流电源上。晶体管VT作为开关周期性接通/切断电枢的电源,当开关管VT导通时,电源电压Ud直接加在电枢两端,Ua=Ud;当开关管VT关闭时,当电流连续时,二极管续流,Ua=0。当电流为零时,Ua等于电动势Ea。开关的频率等于fk=1/tk。
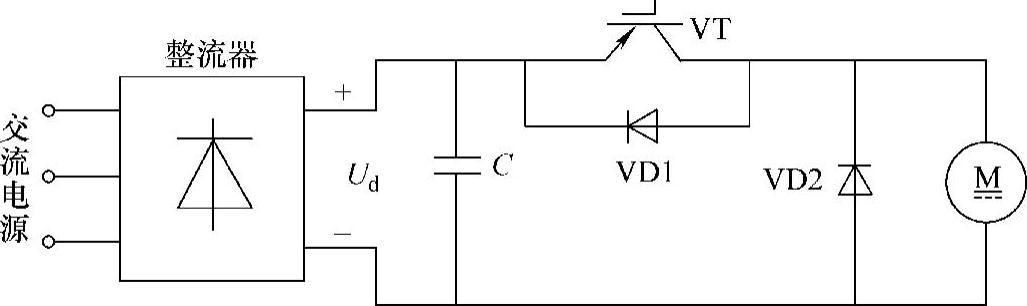
图5-25 直流电动机电压型脉宽调制电气传动的原理图
加到电枢上的电压平均值UA和晶体管导通的占空比γ有关。由图5-27可以看出,脉冲的开关周期为tk=t1+t0,占空比为γ=t1/tk。晶体管导通的占空比越大,电枢上的平均电压就越高,即

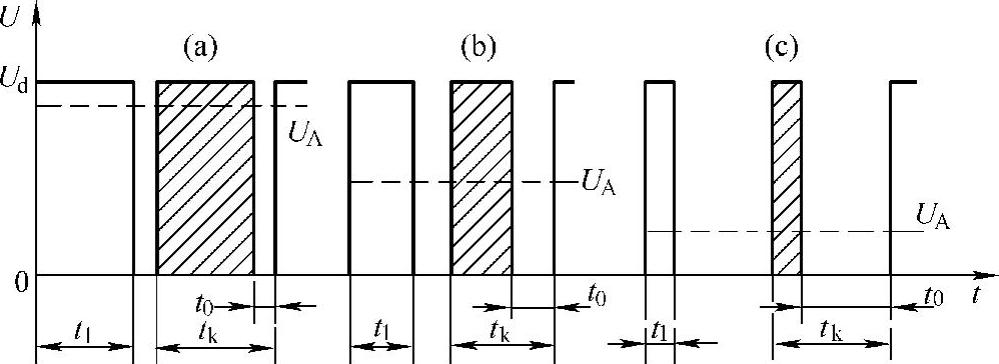
图5-26 脉宽调制的平均电压和占空比的关系
当晶体管开关VT断开时,因为电枢回路具有较大的电感,电流不会马上中断。在电枢自感电动势的作用下,电流流过续流二极管VD2。电枢电流在由三极管VT过渡到二极管VD2的过程如图5-27所示。电流的纹波的大小值与开关动作的频率fk有关,fk越高,电流的纹波就越小。目前脉宽调制的频率多为2~10kHz。在开关频率较高的场合,电流的纹波比晶闸管相控整流器的纹波小的多,可以忽略不计。
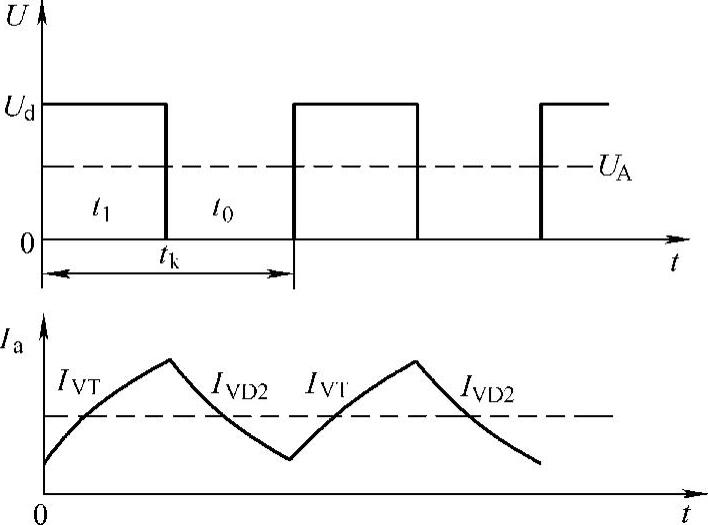
图5-27 脉宽调制的电压和电流
因为加到电枢绕组上的平均电压UA=γUd,所以直流电动机脉宽调制调速系统的机械特性为

需要注意的是占空比γ的变化范围是0~0.95。整流电压Ud的值与整流方式有关,通常这种整流器都带有足够大滤波电容器,这将使整流电压值接近交流电源电压的幅值。
直流电动机不可逆脉宽调制调速系统的机械特性如图5-28所示。这种机械特性类似于不可逆的晶闸管-直流电动机调速系统的机械特性。
为了提高功率因数,电压脉宽调制方式中的直流电源最好采用不可控整流器。因为不可控整流器基波的功率因数接近0.95。
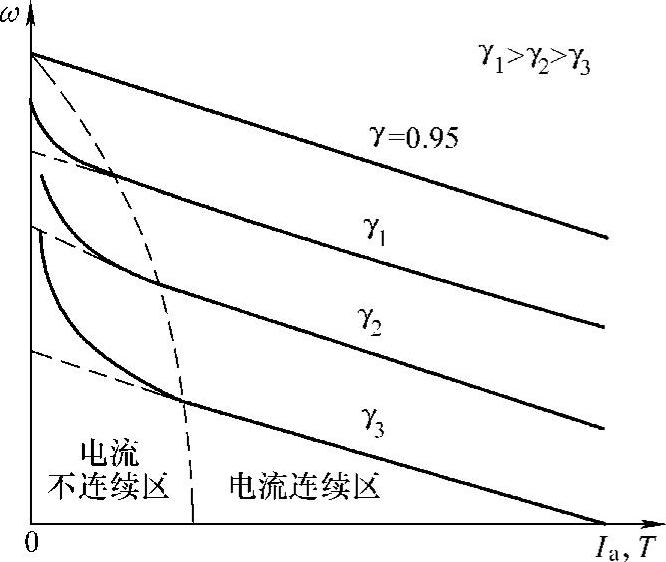
图5-28 直流电动机不可逆脉宽调制调速系统的机械特性(https://www.xing528.com)
为了实现直流电动机脉宽调制的可逆调速,可以采用H型桥式晶体管逆变电路(见图5-29)。在这个方案中,当晶体管VT1和VT4导通时,电流正向流过电枢,电动机正转;当VT2和VT3导通时,电流反向流过电枢,电动机反转。每个晶体管都带有续流二极管VD,它们的作用是保证电枢电流连续。
单极型和双极型
根据各晶体管控制方法的不同,这种H型桥式可逆调速电路可以分为单极性脉宽调制和双极性脉宽调制两种控制方式。
单极型脉宽调制的输出波形如图5-27所示。加到电枢绕组上的平均电压UA的极性是可控的,当VT1与VT2交替导通,VT4一直导通,VT3关断,此时,B点总是为正,A点总是为负。当VT3与VT4交替导通,VT2一直导通,VT1关断,此时,B点总是为负,A点总是为正。虽然电动机可以正反两个方向旋转,但是在同一旋转方向时,加到电枢绕组的电压极性不变。
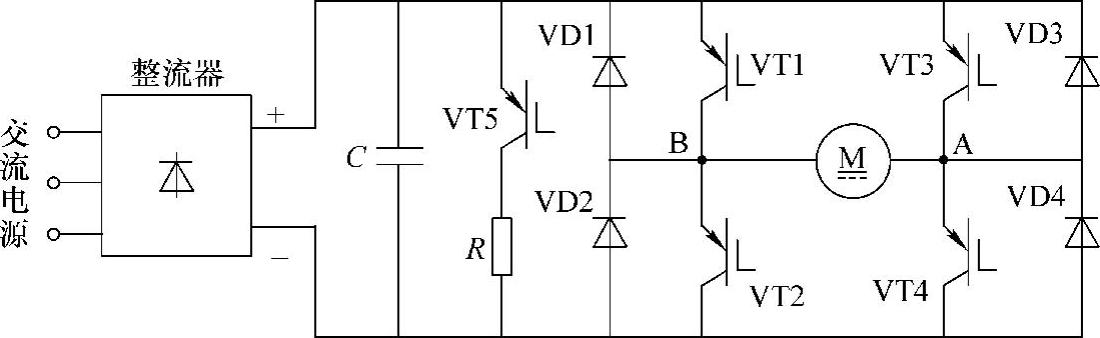
图5-29 H型桥式晶体管可逆调速的主回路原理图
双极型脉宽调制的输出波形如图5-30所示。把四个晶体管分为两组:一组为VT1和VT4,另一组为VT2和VT3,同组中两个晶体管同时通断,不同组晶体管相互交替通断。在一个开关周期中的t1时间段内,VT1、VT4导通,VT2、VT3关断,B为正,A为负,电枢电流经VT1、VT4从B流到A,电机处在电动工况。在(tk-t1)时间段内,VT1、VT4关断,二极管VD2、VD3续流,A为正,B为负,但是电枢电流方向不变,电机仍处在电动工况。如果电流连续,则电机始终处于电动状态。
若在在(tk-t1)时间段内的某一时刻,电枢电流衰减到零,在电枢电压和电枢电动势的共同作用下,使晶体管VT2、VT3导通,电枢电流反向,并经过晶体管VT2、VT3从A流到B,电机进入反接制动状态。
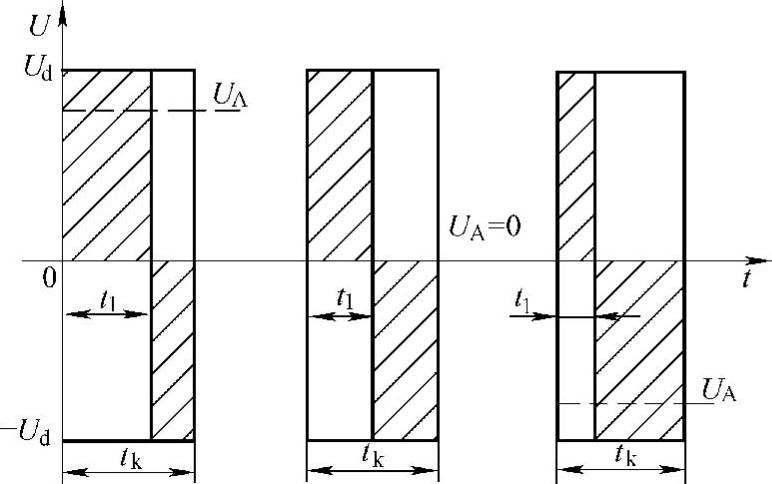
图5-30 双极型脉宽调制的输出波形
在VT1、VT4再次导通之前,必须关断VT2、VT3,电枢电流由极管VD1、VD4续流,电机进入再生回馈制动。制动能量为电容C充电。为了防止电容电压过高,当电容电压达到限制值时,使晶体管VT5导通,把制动能量通过电阻R释放掉。
如果需要电动机反向,应将上述两组晶体管的通断关系互换。
加到电枢绕组上的平均电压UA与图5-30中上下阴影面积之差成比例。如果t1>0.5tk,平均电压UA为正;如果t1=0.5tk,则平均电压UA=0;如果t1<0.5tk,则平均电压UA为负。
双极型脉宽调制的平均电压波形为
UA=Ud(2γ-1) (5-32)
式中 γ=t1/tk开关组VT1~VT4导通时间与开关周期tk之比,即占空比。
单极型和双极型的调制方式各有优缺点,单极型方式控制简单,但是性能不如双极型方式优良。双极型调制方式在输出平均电压等于零时,电枢回路中存在的交变电流增加了电机的损耗,但它所产生的高频微振能起到动力润滑的作用,有利于克服机械静摩擦。而单极型调制方式在输出电压平均值为零时电枢回路中没有电流,不产生损耗,也没有动力润滑作用。双极型调制方式开管损耗较大。
还有采用复合算法的脉宽调制方式,即当UA<0.5Ud时,采用双极型算法;当UA>0.5Ud时,采用单极型算法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。