



当电动机转速大于空载转速(ω>ω0)时进入回馈制动工况。这时电动机的电动势大于电枢供电电压(Ea>Ua),电枢电流Ia的方向和电动势Ea的方向相同,和电枢电压Ua的方向相反。这意味着制动能量流向为电枢供电的直流电源。只有满足下述的三个条件时,直流电动机才能进入到回馈制动工况。
(1)为电枢供电的直流电源必须是能够流入电流的电压源。这对于半导体整流电源来说,是非常重要的,因为有些半导体整流电源只能单方向流出电流。在这种情况下,回馈制动就不能实现。
(2)为电枢供电的直流电源必须能把来自电动机的制动能量回馈到电网或蓄电池。如果这个直流电源是由一台柴油机驱动的直流发电机,回馈制动也无法实现。
(3)改变电枢的供电电压,就可以改变空载转速ω0。这样就可以在宽调速范围内实现回馈制动。
回馈制动的主要优点是能量效率高,机械特性硬度高,电动工况和制动工况间可以平滑过渡。
因为在回馈制动工况时电枢电流Ia和转矩T的符号为负号,考虑到式(5-1)和(5-5),直流电动机回馈制动工况的电压平衡方程和机械特性方程可以写成如下形式(https://www.xing528.com)
电压平衡方程Ea=Ua+RaIa机械特性方程
直流电动机回馈制动的机械特性如图5-7所示。假定恒定负载转矩为TL,电动机起动后工作在点1之处。如果想要减小速度,就应当把电枢电源电压由Ua1减小到Ua2。因为电动机转子具有惯性,所以转速不会立即改变。电动机的工作点由点1跳到点2,进入到回馈制动工况。在制动转矩和负载转矩的共同作用下,电动机的转速逐渐降低到ω02,重新进入到电动工况。在负载转矩的作用下,电动机的转速进一步降低,最终稳定运行于工作点3之处。
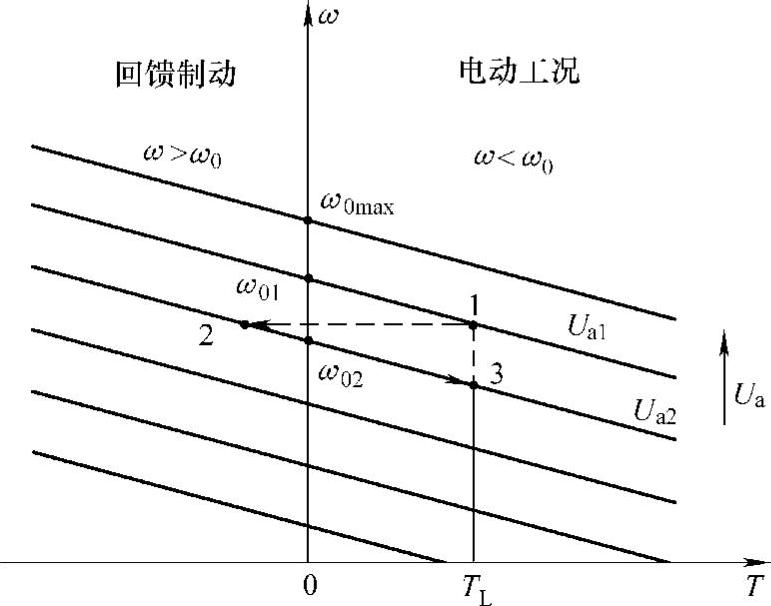
图5-7 直流电动机回馈制动的机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。