



描述调速型电气传动系统稳态调速性能的两个重要指标是调速范围和静差率。
调速范围D的定义可以由图4-2说明。图中的直线1是电气传动系统在最高速度时的机械特性。假定机械特性在不同速度时硬度相同(这种假设与现代大多数电气传动系统的特性相一致)。当速度降低时机械特性将平行于直线1向下移动,直至与最大转矩Tmax相交,成为最低速度时的机械特性2。最大转矩Tmax和最小转矩Tmin的中间值TLP所对应的最高速度为ωmax,最低速度为ωmin。调速范围D为ωmax和ωmin之比,即
根据图4-2还可以得到
式中 β——机械特性硬度的绝对值。
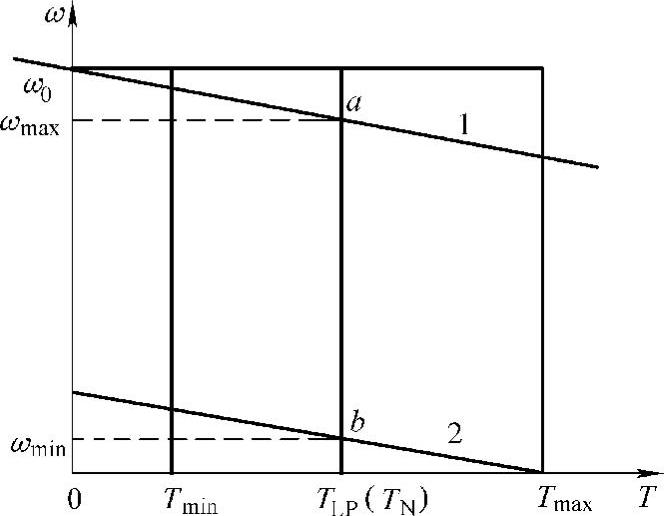
图4-2 调速范围的定义
式(4-2)表明,调速范围和机械特性的硬度有关,硬度越大,调速范围就越大。
在多数情况下电动机的额定转矩TN的值和中间转矩TLP的值很接近,有时为了方便起见,用TN代替TLP,上述调速范围的公式依然有效。
另一个重要的调速性能是调速精度,调速精度是用静差ΔωL和静差率S来表示的。静差表示传动系统在加上额定负载时的速度降落值。如果传动系统的机械特性是线性的,硬度的绝对值β就是常数(见图4-3),那么静差等于

在整个调速范围内,静差ΔωL恒定不变。
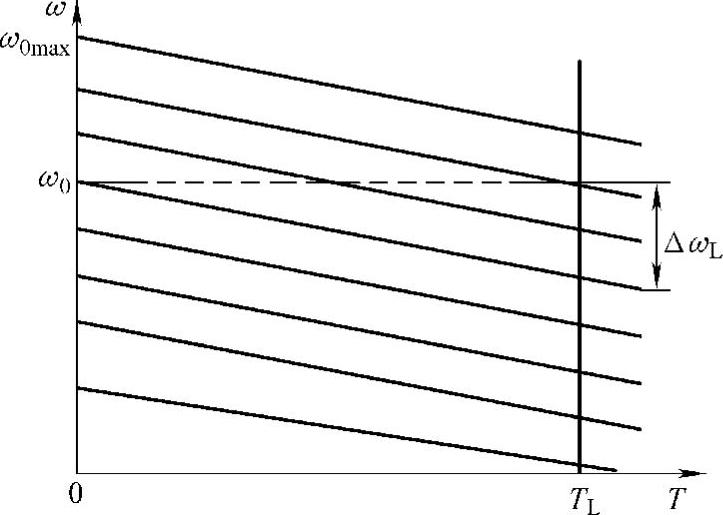
图4-3 静差和静差率的定义
静差的相对值是静差率,它是静差与理想空载转速之比。静差率是用来衡量调速系统在负载变化时转速的稳定程度的。静差率S的公式是

由式(4-3)和式(4-4)可知,静差率和机械特性的硬度成反比关系,特性越硬,静差率越小,转速的稳定度就高。对于同样硬度的机械特性,理想空载转速越低,静差率越大,转速的相对稳定度也就越差。
在设定的静差率Sset的条件下,考虑到ΔωL=(Tmax-Tmin)/2β,调速范围的公式为

调速范围D和静差率S这两项指标不是相互孤立的,必须同时提出才有意义。静差率主要指在最低速时的静差率;调速范围是指满足最低速时的静差率条件的速度变化范围。
开环控制的传动系统的机械特性硬度不够,导致调速范围和调速精度不能达到预期的要求,所以,可调速型电气传动最好采用闭环控制系统。
下面分析负反馈对于调速系统机械特性的影响。图4-4是开环调速控制系统和带有速度闭环的控制系统的结构框图。
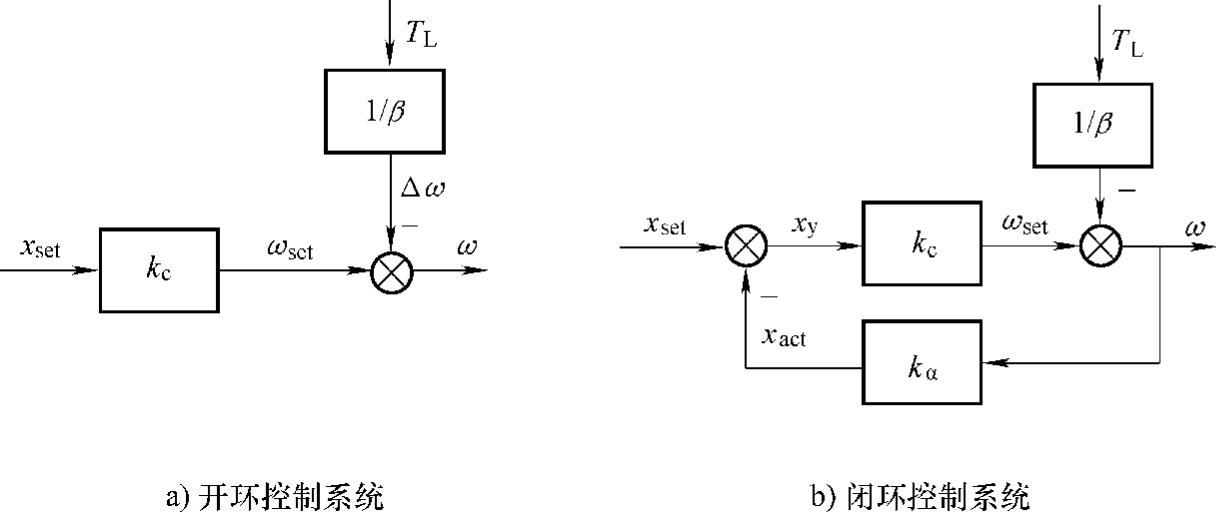
图4-4 开环调速控制系统和闭环调速控制系统结构框图(https://www.xing528.com)
在开环控制系统中,速度设定值为ωset=kcxset。当负载转矩为TL时,静差与机械特性的硬度有关。开环控制系统无法减小因负载变化引起的速度静差。
在闭环控制系统中,速度作为被控制量,通过速度传感器检测出速度值。经过速度反馈系数将检测出的速度值作为负反馈送到调节器的输入侧。这时有
xact=kαω (4-6)
速度调节器是针对速度设定值和速度实际值之间的偏差值进行调节的。速度设定值和实际值之间的偏差值为
xy=xset-xact (4-7)
现用图4-5说明负反馈的原理。直线1是开环控制传动系统的机械特性。如果负载转矩TL=0,并且速度设定值为ω0.set时,电动机的工作在速度设定点。当负载转矩增加到TL,工作点沿着直线ω0.set-c由ω0.set移至c点,电动机的速降为Δω,相当于图中的线段ac。此时的速降值为Δω=TL/β。
而在闭环控制的情况则完全不同,当电动机加上负载后,速度开始下降,速度反馈信号xact=kαω也随之减小。于是调节器输入端的偏差值xy=xset-xact增大,相当于控制系统的速度设定值ωset=kc(xset-xact)增大。在空载时增加的速度设定值为ω0.b,电动机机械特性自动移到直线ω0.b-b上。如果这时负载转矩为TL,在过渡过程结束时,工作点移到b点。虽然还存在闭环稳态的偏差ΔωC.L(相当于线段ab),但是已经比开环控制时的偏差Δω(相当于线段ac)小得多。
在闭环控制系统中,如果负载转矩为TLd,电动机的工作点在d点;如果负载转矩是TLf,电动机的工作点移到f点。由此可见,闭环控制系统将使传动系统的机械特性变硬,其特性如直线2所示。经过简单的推导可以得到闭环控制电气传动系统的机械特性硬度为
βCL=(1+K)β (4-8)
式中 K——闭环控制系统的开环比例增益,K=kc·kα。
这说明闭环控制使得电动机的机械特性硬度增大为(1+K)倍。稳态速度偏差值也减小为开环系统的1/(1+K)。即
相应图4-5中的线段之比也有
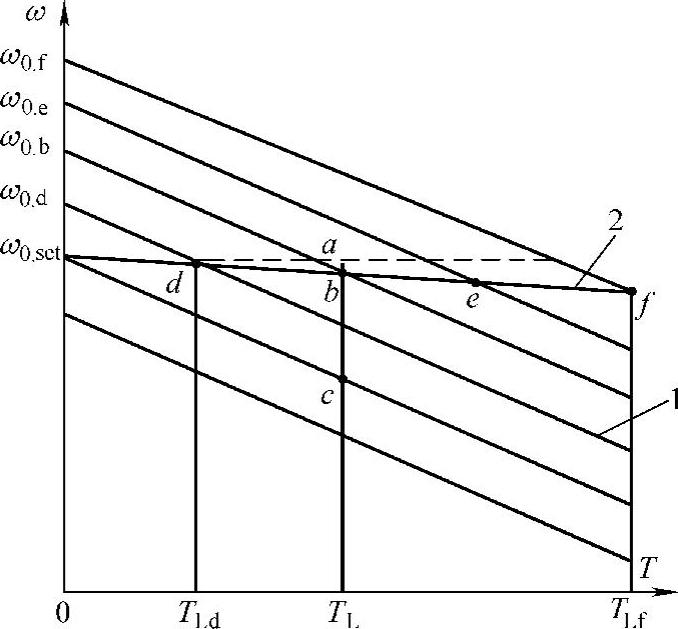
图4-5 速度闭环的调节原理
例题4.1一台电动机具有线性的机械特性,其机械特性硬度为β=10N·m·s。电动机的额定转矩为TN=50N·m,最高空载转速ω0=104.7rad/s(即1000r/min)。如果负载转矩的变化范围为0.15TN≤TN≤1.2TN,并要求静差率达到10%,求出该电动机的所能达到的调速范围。如果希望调速范围达到D=100,机械特性的硬度应当是多少?
解:1.静差率为10%时的调速范围,根据式(4-5)得到调速范围为


2.为了求出调速范围为D=100时的机械特性硬度,需要把式(4-5)稍加变化,即

由此例题可以看出,只有采用速度闭环控制的电气传动系统,并且有足够大的开环比例增益,才能提高机械特性的硬度,满足设定的调速范围。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。