



变极调速是通过改变电动机定子绕组的极对数pn来改变转速。只有改变定子绕组结构,才能改变极对数。改变极对数的电动机必须采用笼型转子,因为笼型转子的极对数能够自动地与定子极对数相对应。绕线转子异步电动机和同步电动机不能采用变极调速。这种调速是有级的,通常选用两种工作转速,特殊情况可以选用三种或四种工作转速。改变极对数的方法有:
-定子上设置单一绕组,改变其不同的接线组合,可以得到2∶1、3∶1或4∶3的双速电动机;
-定子上设置二套不同极对数的独立绕组,可以得到4∶3、6∶5的双速电动机;
-定子上设置二套不同极对数的独立绕组,而且每个独立绕组又有不同的接线组合,以得到不同的极对数。这种方法用于三速或四速电动机。
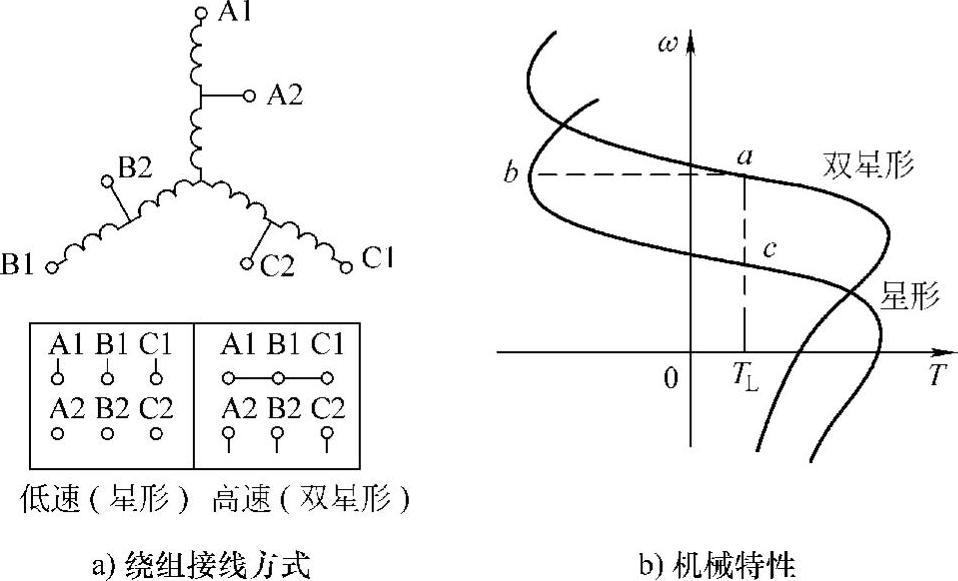
单一绕组双速电动机有星形/双星联结和三角形/双星联结。
星形/双星形联结的每相定子绕组都是由两段绕组构成,这两段绕组可以串联使用,也可以并联使用(见图3-20)。并联使用时,电源电压加到两段绕组的中间点,而绕组的端部短接,构成两个星形联结的绕组。这种接线方式对应于极对数少、转速高的情况。在串联使用时极对数增加一倍,额定转速降为一半。例如一台电动机在双星形联结时pn=2,额定转速为1470r/min(同步转速n0=1500r/min);转换为星形联结时pn=4,额定转速735r/min(同步转速n0=750r/min)。
因为绕组长期通电的电流是额定电流值,在这两种情况下电动机的功率分别为
双星形联结时(高速)P=3U1·2I1Ncosφ1·ηN
星形联结时(低速)P=3U1·I1Ncosφ1·ηN也就是说双速电动机在高速时的额定功率大约是低速时额定功率的2倍。但是长期的额定转矩不变。这是因为TN=PN/ωN。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-20 双速变极调速星形/双星形的绕组联结方式和机械特性
三角形/双星联结方式和机械特性如图3-21所示,双星形联结方式属于两段绕组并联使用,对应于极对数少、转速高的情况。两段绕组串联使用为三角形联结方式,极对数增加一倍,转速降低一倍。两种接线方式的电动机的功率都是

式中 U1——电源相电压。
而三角形联结时的转矩是双星形联结时转矩的3倍。因此两种接线方式的功率基本相等。
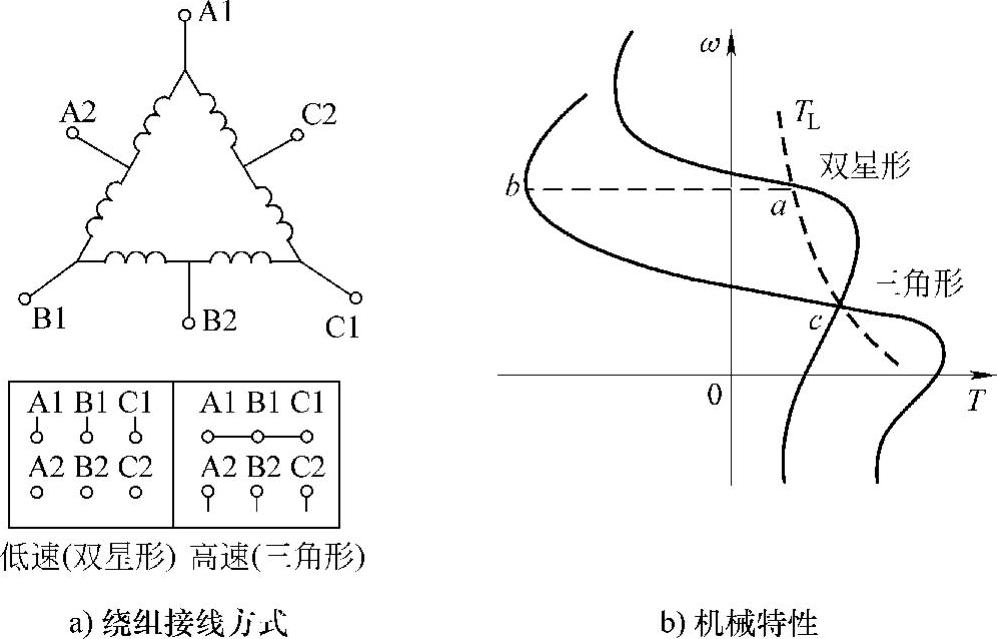
图3-21 双速变极调速三角形/双星形的绕组联结方式和机械特性
变极调速的优点是线路简单,价格低廉,对电网没有污染。适用于只需要几种固定转速的工作机械,例如起重机可以利用变极调速实现不同的提升速度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。