



异步电动机常用的制动工况属于发电工况。常用的制动方式有3种:回馈制动、能耗制动和反接制动。还有一种特殊的制动方式——电容制动。为了说明这几种制动方式,图3-13所示为异步电动机全象限的T-s机械特性。
回馈制动(又称再生发电制动)
当异步电动机转子速度超过同步转速时,进入再生发电制动工况。这时ω>ω0,s<0。进入这种工况的原因是电动机轴上的负载转矩与转速方向一致,或者说工作机械使电动机加速至超同步转速。在卷扬机下放重物时经常出现这种再生发电制动工况。
异步电动机在回馈制动工况的机械特性和电动工况的机械特性是相似的(呈角对称)。计算机械特性的公式仍然用式(3-27)。回馈制动工况的临界转矩略大于电动工况的临界转矩(见式(3-24),分母中根号前用减号)。发生这种现象的物理解释是:在电动工况时,定子回路的电阻r1上的损耗使电磁转矩减小;在发电工况时,r1上的损耗不影响电磁转矩。
回馈制动的能流图如图3-14所示。加到电动机轴上的机械功率PM变换成为电磁功率Pe和转差功率Ps。电磁功率Pe扣除定子损失ΔP1的部分回馈到电网。转差功率消耗在转子回路中。
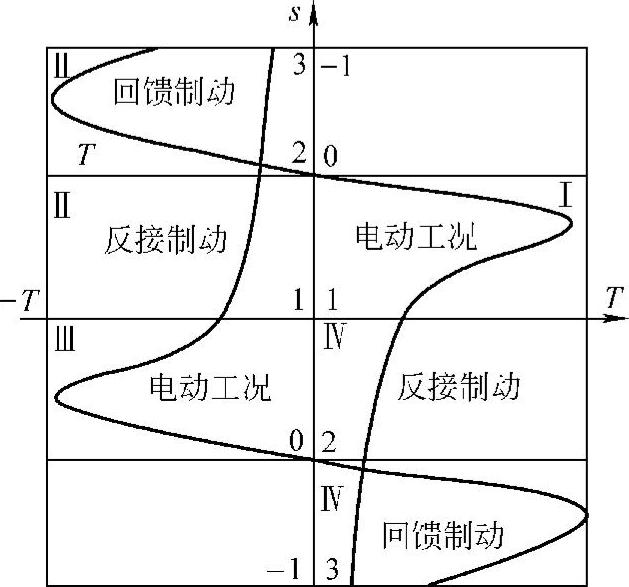
图3-13 异步电动机全象限的T-s机械特性
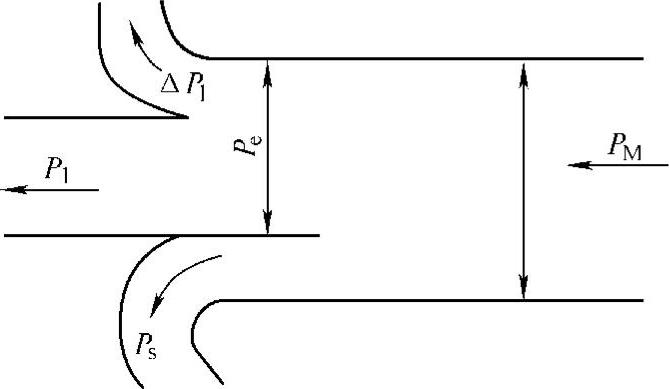
图3-14 回馈制动的能流图
由能流图可以得到Pe+Ps=Tω0-Tω0s,这时转差率s的符号为负。
需要指出,在回馈制动的工况下,回馈到电网的功率是有功功率。而在异步电动机中建立磁场所需要的无功功率必须从电网得到。因此作为异步发电机的定子绕组不能脱离电网发电。但是可以把电容器组接到异步发电机的定子绕组,用电容器组作为无功功率源(见图3-18)。
能耗制动(又称动力制动)
是把异步电动机的定子绕组从交流电源上切断,另外接入一个直流电源和制动电阻RDC(见图3-15)。直流电源在定子绕组中产生一个在空间静止的磁场,这个磁场的转速ω0·DC=0。转差率等于sDC=-ω/ω0·N,式中ω0·N是定子旋转磁场的额定角速度。
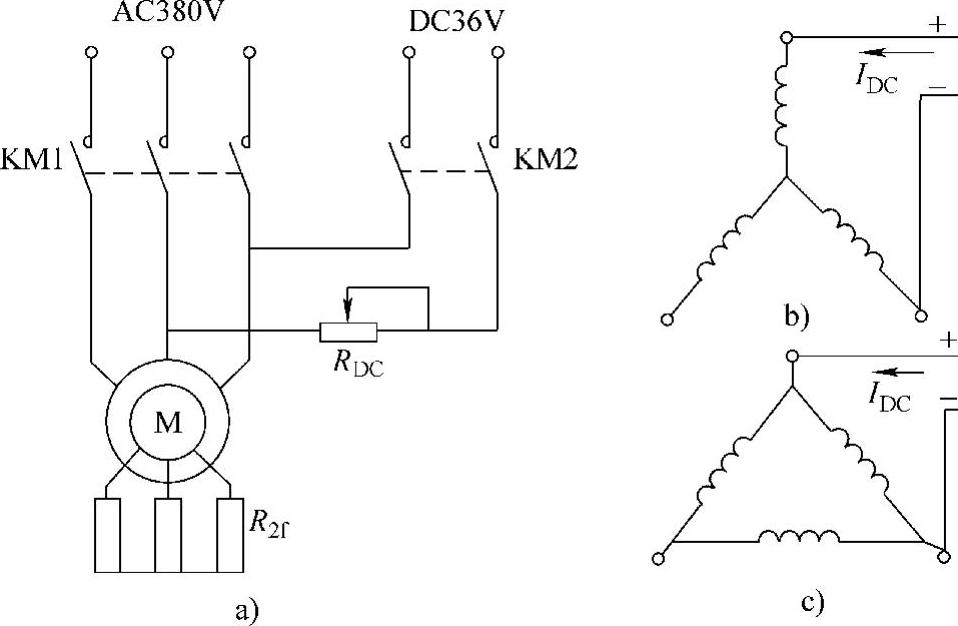
图3-15 异步电动机能耗制动的接线图
笼型异步电动机的能耗制动的机械特性画在第Ⅱ象限,如图3-16中曲线1、2所示。机械特性的起始点是坐标原点。改变定子绕组中直流励磁电流IDC的值,就可以改变能耗制动的强弱。电流越大,制动力矩就越大。但是IDC的值不可大于定子的额定电流I1N,否则将引起电动机磁路饱和。
对于绕线转子异步电动机还可以在转子回路增设附加电阻R2f增强能耗制动的力度。这种方法类似于转子串电阻起动,由于改善了cosφ2,使得临界转差率上移,在高转速时得到较大的制动力矩(见图3-16的曲线3、4)。
异步电动机在能耗制动时相当于定子三相绕组供电的频率是f1=0。另外,这个直流电源应当是电流源特性,即在制动过程中保持制动电流不变。
为了计算能耗制动的特性,需要用等效电流Iequ代替实际电流IDC。在产生相同的磁通的情况下,等效电流Iequ是流过定子三相绕组的电流。
对于图3-15b的接线方式,等效电流Iequ=0.816IDC
对于图3-15c的接线方式,等效电流Iequ=0.471IDC
异步电动机在能耗制动时的矢量图如图3-17所示。图中给出能耗制动的电流关系:
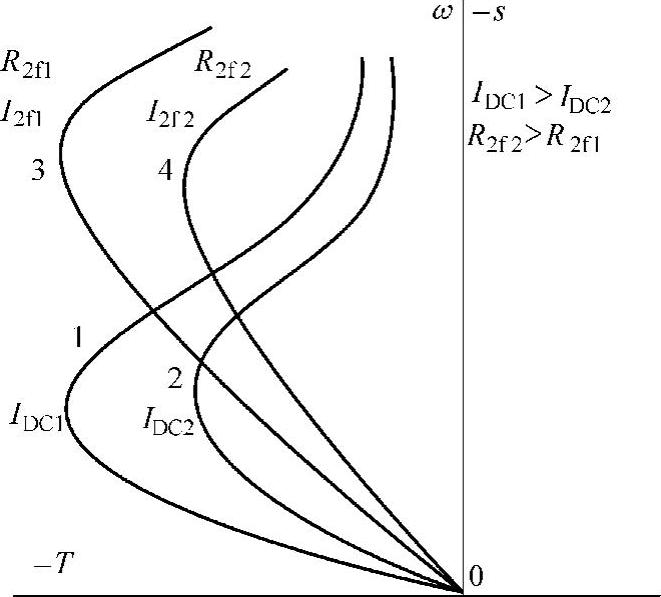
图3-16 异步电动机能耗制动的机械特性
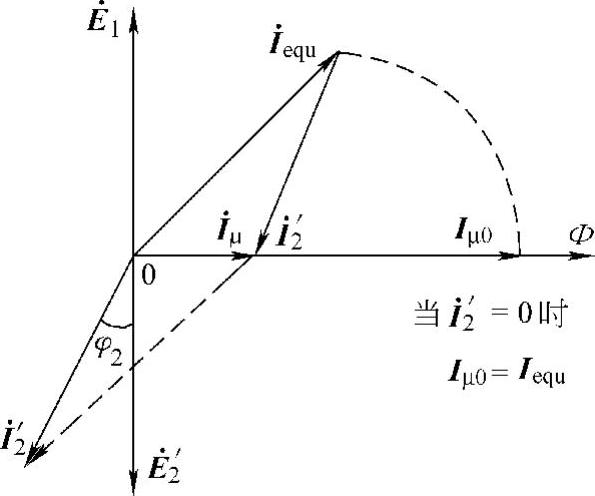
图3-17 异步电动机在能耗制动时的矢量图(https://www.xing528.com)
I·μ=I·equ+I·2′
当I·equ不变时,磁化电流同转子电流有关。随着转差率值增大,在转子电流无功分量的作用下,磁化电流减小。在电动工况时(忽略磁路饱和)机械特性的近似公式为

式中
应当指出,在能耗制动时的临界转差率小于电动工况时的临界转差率,即xμ>>xk。为了得到相当于电动工况时的最大的制动转矩,等效电流Iequ应当是额定空载电流I0的2~4倍。能耗制动所用的直流电源电压要显著低于额定电压,一般情况下应当是UDC≈(2~4)Iequ·r1。
能耗制动的异步电动机很像一台同步发电机,加有直流电源的定子绕组相当于同步发电机的励磁绕组,转子回路的电阻(以及附加电阻)就相当于是发电机的负载。加到电动机轴上的全部机械功率转变成电功率,并消耗在转子回路的电阻上。
能耗制动的异步电动机还可以采用电容励磁的方法(见图3-18)。这种方法是利用电容器和定子绕组构成回路产生励磁电流。这种方式本质上也属于能耗制动,有些资料中称之为电容制动。
利用电容进行能耗制动的原理如下:当异步电动机电子绕组的交流电源被切断后,转子铁心上残存剩磁。在剩磁的作用下,定子绕组中产生感应电动势。感应电动势在定子绕组和电容构成的回路中产生励磁电流。这个励磁电流加强了气隙磁通,使转子绕组中产生制动电流。通常电容制动用于小功率(5kW以下)的异步电动机。这是因为制动转矩与电容量有关,电动机功率越大,所需要的电容量就越大。
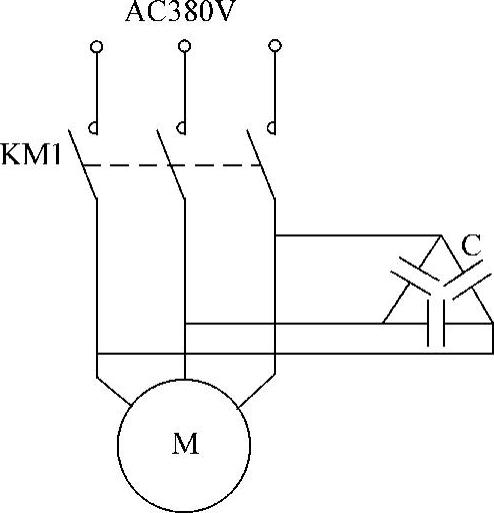
图3-18 利用电容励磁的能耗制动
反接制动
笼型电动机的反接制动用于下列二种情况:
-为了紧急制动,改变异步电动机定子电源的相序,这种方式称为相序反接制动;
-在位势负载的情况下,将绕线转子异步电动机的转子串入附加电阻,机械特性变软,转矩方向向上,转速方向向下,二者相反,限制下放重物的速度。这种方式称为速度反接制动。
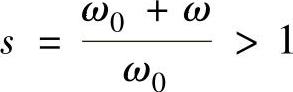
反接制动时,定子产生的旋转磁场和转子旋转的方向相反。反接制动时转差率始终大于1。
反接制动的机械特性如图3-19所示。曲线1是电动工况时的自然机械特性,a点是这时的工作点。
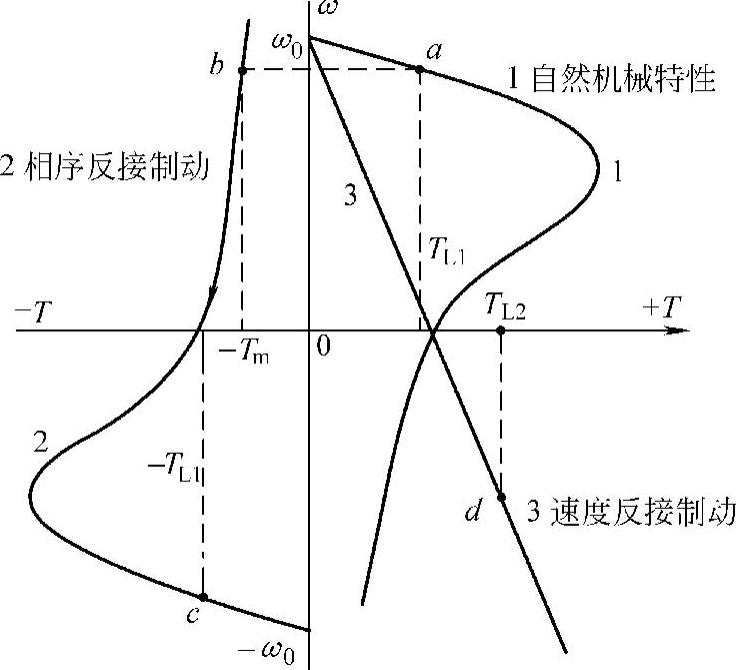
图3-19 反接制动的机械特性
曲线2是定子电源相序反接后的机械特性,工作点由点a跳变到点b。在制动转矩-Tm的作用下电动机的转速沿着曲线2迅速下降,当转速接近零时应当及时切断电源,否则电动机将反方向起动直至到达工作点c。
机械特性曲线3对应于速度反接制动,这时工作点位于点d。电动机向上的转矩小于重物的负载转矩,在重物的重力作用下,迫使电动机向转矩的反方向旋转,直至在d点平衡。这时工作点位于第Ⅳ象限。
无论相序反接制动还是速度反接制动,能量指标都很差。消耗在转子回路的功率损失是定子输入的电磁功率与转子轴上功率之和,即
ΔPs=Tmω0+Tmω
对于笼型异步电动机的相序反接制动,定子电流值将达到额定电流的10倍以上。相序反接制动的过程只有几秒钟,制动准确度差,需要自动控制电路切断电源。使用绕线转子异步电动机反接制动时,必须在转子回路串入附加电阻。这时转子回路的能量损失主要消耗在附加电阻上。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。