



异步电动机的磁通量正比于定子电压U1。转子电动势、转子电流I2也跟随磁通变化,也和定子电压成正比。因此,异步电动机的转矩以及临界转矩Tk都与定子电压的二次方成正比(见式(3-21)和式(3-24))。这种情况表明,异步电动机在起动和工作时不允许降低电源电压。假如定子电源电压降低30%,那么临界转矩将减小到正常值的一半左右。如果负载转矩较大,尽管有很大的起动电流,电动机也将被堵转。这种情况对于电动机来说是很危险的,将导致烧毁电动机的绕组。同样的情况也可能发生在笼型异步电动机带着重载起动,而电网能力较弱的场合。为了避免烧毁电动机,在电动机的起动电路中要设计必要的保护措施,以防止电动机长时间工作于较大起动电流的工况。
与此相反,有时还有意降低加到定子绕组的电压,这是为了平稳起动异步电动机或者是为了调节异步电动机的转速。
这种调速方式属于变转差率调速,在转速低、转差率大时,电动机的效率低、温升高。因此,改变定子电压的调速方式只能在特定条件下应用:
-相对于额定转速,调速范围较小;
-相对于额定转矩,负载的转矩较小;
-尽量使用高转差率电动机。
改变异步电动机定子电压的机械特性如图3-12所示。改变定子电压U1并不会改变理想空载转速ω0和临界转差率sk。但是临界转矩Tk减小的程度近似与电压降低程度的二次方成比例。相应的机械特性中工作区段的硬度也随之下降。可能的调速范围在ω0~ω0(1-sk)之间。
对于普通的恒转矩负载,且负载转矩为TN,工作点在a、b、c之处,因转速变化太小,无实用价值(见图3-12a)。并且由异步电动机能流公式(3-36)可知,对应转差率为sp之处的工作点c,该点的转差功率为Ps=TNω0sp,正比于图中阴影矩形0pcsp的面积。输出轴上的机械功率为PM=TNω0(1-sp),正比于图中矩形spcq1的面积。(https://www.xing528.com)
额定转差功率正比于矩形0pasN的面积,大约是工作点c的转差功率(矩形0pcsp的面积)的2/5。这说明降低定子电压将使转子损耗大为增加,这将导致电动机过热。应对的办法只有加大电动机的额定功率或者使用特殊散热结构的电动机。所以说,对于恒转矩的负载机械而言,改变定子电压调速没有实用价值。
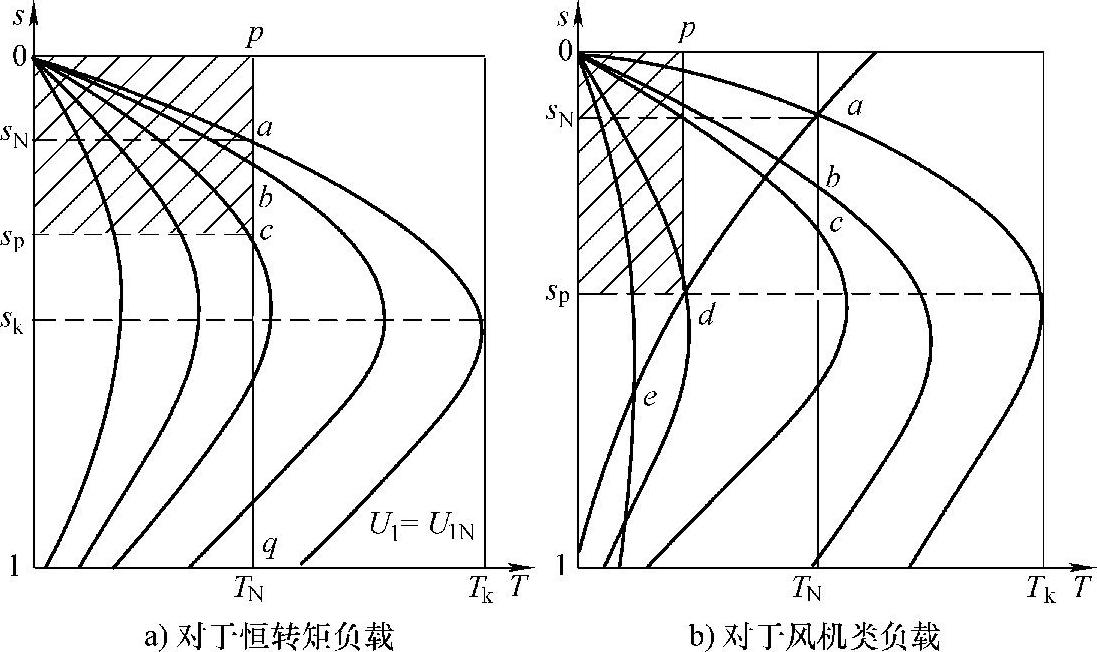
图3-12 异步电动机改变定子电压调速的机械特性
对于风机水泵类负载,改变定子调压调速方法就比较合理。这是因为风机、水泵类的负载转矩随着转速降低而减小(见图3-12b),对应于转差率sp的工作点位于点d之处。因为这类机械的负载转矩与转速的二次方成正比,所以随着转速降低负载转矩按二次方数量级减小,功率按3次方数量级减小。这样就可以达到节电的目的。资料显示,定子调压调速的平均节电率接近25%。这时转差功率Ps并没有显著的变化。分析表明,这类负载无论转速高低,转差功率Ps是额定电磁功率PeN的18%~20%。
有时把降低异步电动机定子电压的方法用于减小起动电流。但是这种方法只能用于起动时负载转矩只是(0.3~0.4)TN的场合,例如风机、水泵或空载起动的机械设备。现在多采用由晶闸管相控原理构成的软起动器实现异步电动机的减压起动,然后逐渐升高电压直至额定电压。这样做不但减小了起动电流,而且还减小了起动时的机械冲击。
需要注意的是,晶闸管相控的软起动器产生大量的谐波电流。用于改善功率因数的电容器组会对谐波电流起到放大作用,所以在起动过程中,不可投入补偿电容器组。起动结束后,方可投入补偿电容器组。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。