



先来研究绕线转子异步电动机转子短接的工作情况。式(3-4)表明,异步电动机的电磁转矩同磁通Φ、转子有功电流分量I2′a成比例(撇号表示把转子侧的电流值折算到定子侧)。磁通Φ是电源电压通过定子绕组产生的,它的值同电源电压的有效值U1和频率ω0有关,即

转子电流I2为

式中 Z2——转子相绕组的全部阻抗。
转子绕组的感抗x2的值随转子电流频率变化,也可以说x2随转差率s变化,即

在转子静止时(s=1),转子绕组的感抗x2最大;随着转速升高(s减小),x2逐渐变小;当转速达到额定值,x2约为s=1时的最大值的1%~3%。把s=1时的x2定义为额定值,表示为x2·s=1=x2N,于是有
x2=x2N·s(3-12)然后得到转子电流为

转子电流的有功分量为

式中
根据功率不变性原理,可以把转子回路的参数折算到定子侧,并考虑到电动机的电压比kT=U1/E2N,则折算公式为

继而由式(3-16)得到
 和
和 (3-17)
(3-17)
把式(3-17)的分子、分母同除以s,得到

这种分子分母同时除以s只是一种数学运算,并不影响公式(3-18)的有效性。实际上在最初的公式(3-13)中已经清楚地表明,转子感抗x2与转差率有关,转子电阻r2是个常数,与转差率无关。根据式(3-18)可以绘出异步电动机的一相的等效电路,如图3-3a所示。异步电动机的矢量图如图3-4所示。
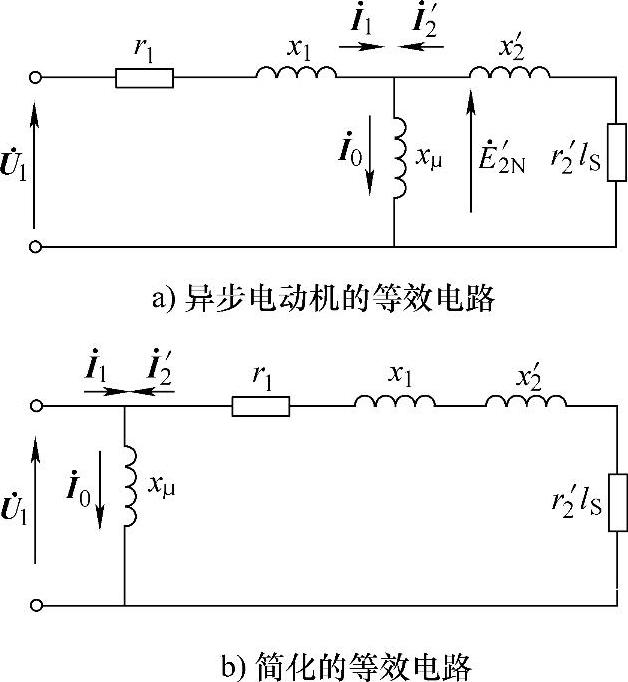
图3-3 异步电动机的等效电路图

图3-4 异步电动机的矢量图
为了简化分析,可以把等效电路中的励磁支路移到进线侧。简化的等效电路如图3-3b所示。由简化的等效电路可以得到转子电流

式中 xk——定子回路和转子回路的总感抗,xk=x1+x′2N。转子电流的有功分量为

把式(3-10)和式(3-20)代入式(3-4),就可以得到异步电动机转矩的公式
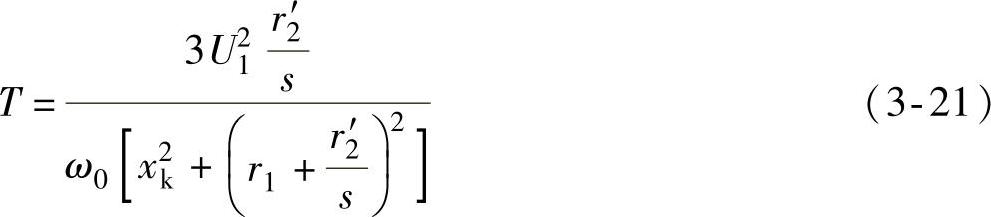
这个公式也可以表示为异步电动机的机械特性s=f(T)。异步电动机的机械特性如图3-5所示。图中还绘有反映异步电动机的机电特性s=f(I1)的曲线。(https://www.xing528.com)

图3-5 异步电动机的机械特性和机电特性
把励磁电流视为电流的无功分量,并由相量图3-4可得到

式中

在图3-5机械特性中转矩拐点的值叫做临界转矩Tk,它是机械特性中转矩的最大值,负载转矩不可超过该值。如果负载转矩超过临界转矩值,将导致电动机堵转。临界转矩相对应的转差率叫作临界转差率sk。在式(3-21)中对s求导,并令dT/ds=0,可以得到临界转矩和临界转差率:


临界转差率sk的符号取正号,表示电动机工作在电动工况;取负号,表示电动机工作在发电工况。临界转矩和额定转矩的比值叫做异步电动机的过载倍数λ

根据式(3-24)和式(3-25)可以把机械特性公式(3-21)转换为更便于使用的形式

如果异步电动机的功率大于15kW,并且工作电源的频率是50Hz,那么定子电阻r1远小于定子回路的总电抗xk,因此可以忽略r1,可以把式(3-24)、式(3-25)简化,得到
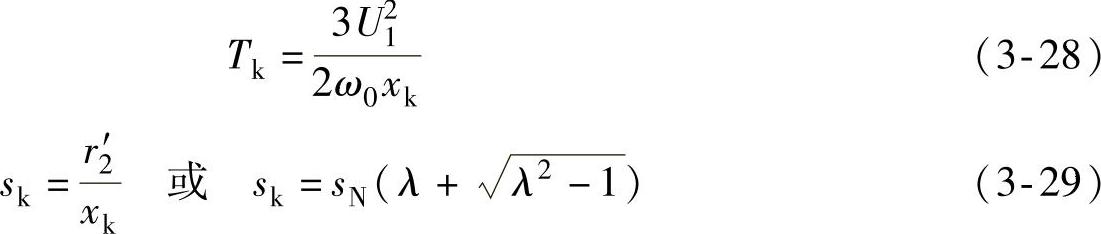
于是机械特性公式(3-27)可以简化成为实用机械特性表达式

有了式(3-27)和式(3-30),就可以根据电动机的铭牌数据及其导出数据——额定转差率sN、额定转矩TN和过载倍数λ计算出该电动机的机械特性。
异步电动机机械特性(图3-5)是非线性的,由两个区段组成。第一个区段是对应于转差率从0到sk的区间,这个区段是工作区段。第二个区段是在转差率大于临界转差率(s>sk)的曲线,这个区段的特性适用于电动机的起动,所以叫做起动区段。
因为在工作区段的转差率很小,几乎没有趋肤效应的影响,计算的结果相当准确。而计算起动区段的机械特性是一个复杂的过程,而我们更关心的是具有代表性的几个特征点。可以用四个具有代表性的特征点近似描述异步电动机的机械特性:同步转速点(s=0),最大转矩点(T=Tk),起动转矩点(s=1)和最小转矩点(T=Tmin)。在电动机的产品样本和电动机手册中可以查到这些特征点的数据。
工作区段机械特性近似线性,斜率基本恒定并且为负值。转矩同定子电流I1和转子电流I2成正比。由于在工作区段中总是有s<sk,式(3-30)中分母的第二项很小,可以忽略不计。于是工作区段的机械特性可以写成线性形式

起动区段的硬度β为正值。尽管电动机的电流增加,转速却降低(转差率增加),转矩也减小。如果将绕线转子异步电动机的转子绕组短接,起动时(ω=0,s=1)电流就会很大,甚至达到额定电流的10~12倍,而起动转矩却只有额定转矩的0.4~0.5倍;笼型异步电动机的起动电流是额定电流的5~7倍,起动转矩是额定转矩的0.9~1.3倍。
为了解释起动电流和起动转矩不协调的现象,可利用转子回路的相量图(图3-6)予以解释。这里分为两种情况:转差率较大的起动区段(见图3-6a)和转差率较小的工作区段(见图3-6b)。
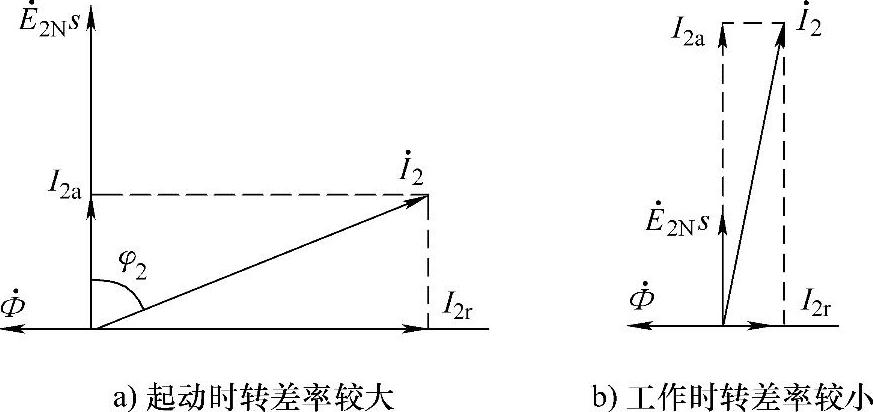
图3-6 异步电动机转子回路的相量图
起动时s=1,转子电流的频率等于电源频率f2=50Hz。转子绕组的感抗x2很大(见式(3-12)),大大超过转子绕组的电阻r2,转子电流滞后电动势的角度φ2很大,即转子电流主要是无功分量。由于这时的电动势E2.s=1=E2N是最大值,起动电流自然会很大;而转子回路的功率因数cosφ2却很小,即转子电流的有功分量很小,发出的电磁转矩自然也很小。
随着电动机加速,转差率减小,转子的电动势、频率、感抗都成比例减小,相应地转子电流和定子电流也会减小。尽管如此,由于这时cosφ2增大,即转子电流和定子电流的有功分量增大,电磁转矩自然就会增大。
随着电动机继续加速,转差率变成小于sk,进入机械特性的工作区段。这时转子电流的频率相当低,致使转子绕组的感抗也非常小,转子电流几乎都是有功分量(见图3-6b),电磁转矩和正比于转子电流。如果电动机的额定转差率sN=2%,相当于起动时转差率的1/50。所以在额定工作状态,转子感抗、转子电动势都是起动时的1/50。当电动机带有额定负载时,足以使转子电流达到额定值,转矩也达到额定值。严格说来,异步电动机的机械特性取决于转子绕组的感抗值,而这个感抗值与转差率成正比。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。