



异步电动机的全称是交流三相异步电动机,其定子上分布着3相互差120°电角度的绕组。定子绕组的磁极对数pn=1(磁极数=2)的绕组分布示意图如图3-2a所示。如果磁极对数等于1,定子三相绕组在空间分布也是互差120°。如果磁极对数超过1,定子三相绕组数量相应增加,每相绕组在空间不是相差120°,而是相差120°/pn空间角度,但是每相绕组之间的电角度仍然是120°。
异步电动机的定子三相绕组可以接成星形接线方式(见图3-2b),也可以接成三角形接线方式(见图3-2c)。一般中小型异步电动机的额定电压多为380V/220V。如果电源电压是380V,定子绕组就可以接成星形联结( );如果电源电压是220V,定子绕组就可以接成三角形联结(△)。实际上在这二种接线方式中,相绕组所承受的电压都是220V。
);如果电源电压是220V,定子绕组就可以接成三角形联结(△)。实际上在这二种接线方式中,相绕组所承受的电压都是220V。
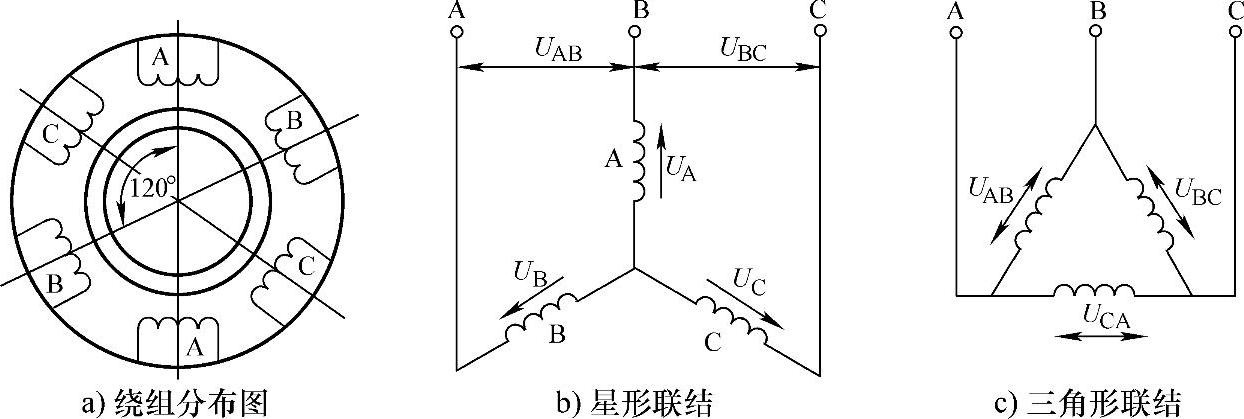
图3-2 异步电动机的定子绕组接线方式
三相电源电压是在时间互差120°(2π/3电角度)的正弦波,异步电动机定子绕组在空间上相差120°/pn。在二者共同的作用下,在电动机气隙中产生旋转磁场。旋转磁场作用于转子产生电磁转矩,这就是使异步电动机能够工作的力量之源。旋转磁场的角速度为

式中 f1——三相正弦电源电压的频率。
通常把ω0叫做同步角速度或同步角频率,它和电源频率成正比,和电动机的极对数成反比。与之相对应的是同步转速n0(r/min),它的公式为

本书不再赘述建立旋转磁场的原理,而只是复述其中有用的结论:时间上互差120°的三相正弦交流电流在空间互差120°的绕组中可以产生旋转磁场;改变电源的相序就可以改变旋转磁场的方向。顺便提及,电机制造厂在检验异步电动机定子绕组下线是否正确时,把定子绕组接到电压较低的三相电源上,然后把指南针在定子膛内移动,如果指南针随着旋转磁场转动,就说明下线正确。
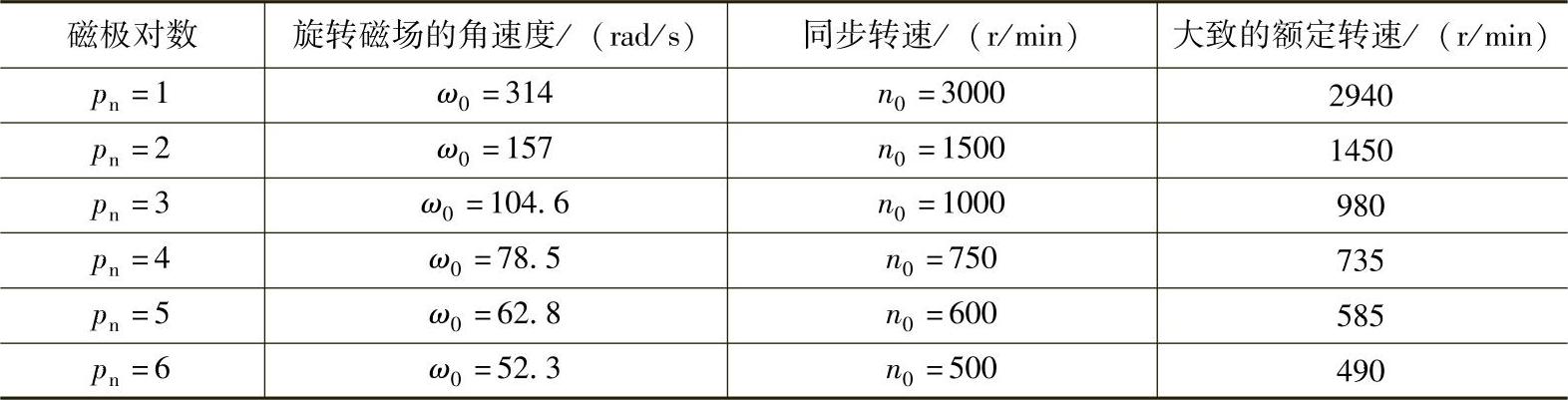
改变异步电动机的极对数,可以有级地改变同步转速。表3-1给出了异步电动机的同步转速、额定转速与极对数之间的关系,这是以交流电源频率f1=50Hz进行计算的。
表3-1异步电动机的同步转速、额定转速与极对数之间的关系
根据异步电动机转子的结构,可以分为绕线转子异步电动机和笼型异步电动机。所谓绕线转子异步电动机是在转子上绕有三相绕组,这个绕组通常是星形联结。绕组的端头连接到集电环上,通过碳刷引到端子盒。在起动时转子绕组串接电阻,随着转速升高,逐级切除电阻,最后将转子绕组串联电阻短接。
笼型异步电动机的转子是采用铸铝工艺,在转子铁心中铸出数条心柱,并在转子铁心的两个端部与短路环连接。因笼型转子的形状类似一个饲养松鼠的栅笼,故俗称为鼠笼转子,其作用等效于短接的三相绕组。
异步电动机旋转磁场的磁通Φ与转子电流的有功分量I2a相互作用产生电磁转矩T,写成公式为(https://www.xing528.com)

转子电流是由转子感应电动势产生的。在转子静止时,定子绕组如同变压器的一次绕组,转子绕组如同变压器的二次绕组。这时,转子绕组感应出的电动势叫作转子额定(相)电动势E2N。这个电动势在数值上近似等于定子相电压除以定子、转子之间的电压比kT:

转子旋转时,转子感应电动势E2的大小跟转速有关,转子电流的频率f2的值也与转速有关。这种现象的本质是:在不同的转速下,转子绕组切割旋转磁场的速度不同。若定子绕组在气隙中产生旋转磁场的角速度(或角频率)为ω0,转子的角速度为ω,则可以把二者之差定义为绝对转差sabs,即

如果异步电动机是由恒定频率(例如50Hz)的电源供电,在分析电动机工作特性时,最常用的是相对转差(简称滑差,即转差率)s

转差率是异步电动机最重要的参数。当转子静止时,s=1;当转子为同步转速ω0时,s=0;正常工作时,0<s<1。
当转子静止时,转子感应电动势E2取得最大值E2N;随着转速增加(s减小),E2与转差率成比例地减小
E2=E2Ns (3-8)
与此相似,当转子静止时,转子电动势和转子电流的频率f2取得最大值,等于定子频率f1;随着转速增加(s减小),f2与转差率成比例地减小,即
f2=f1s (3-9)
在电动机额定条件工作时,转子转速与旋转磁场的转速相差不大。对于功率在1.5~200kW的一般用途的异步电动机,额定转差率在2%~3%,而大型异步电动机的转差率约为1%。所以,在额定工作条件时,转子电动势E2大约是最大电动势E2N(即s=1时)的1%~3%,转子电流的频率约为0.5~1.5Hz。当转子转速等于旋转磁场的转速时(s=0),转子电动势E2=0,转子电流I2=0。这种工作状态叫做理想空载状态,这时ω=ω0叫做理想空载转速,也叫做同步转速。
E2和I2决定电动机的机械特性,它们都和转差率s有关,所以说转差率s决定异步电动机的机械特性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。