



在电气传动系统中,旋转的电动机轴上作用着两个转矩:电动机发出的电磁转矩T和工作机械的阻碍运动的负载转矩TL(见图2-7)。如果电动机的电磁转矩等于负载转矩,即
T=TL或者T-TL=0 (2-2)
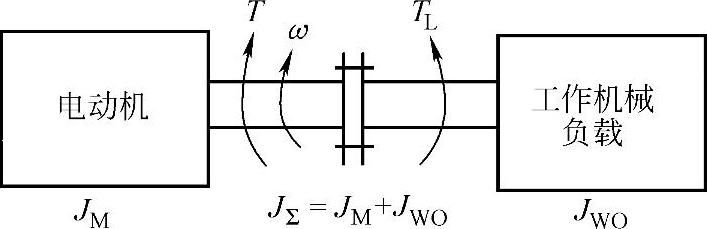
图2-7 作用在旋转机构上的转矩和转动惯量
这时旋转轴将以恒定的角速度ω转动,或者是ω=0保持静止。这种情况相当于牛顿第一运动定律。对于平移运动物体的稳定条件是 ,或者
,或者 ,即加到物体上的合力为零,物体将保持匀速运动或者静止。
,即加到物体上的合力为零,物体将保持匀速运动或者静止。
对于绕着一个固定的轴线做旋转运动的物体,如果所受到的转矩之代数和为零,物体将保持原来的运动状态——匀角速度运动或者相对静止,即
如果 ,则
,则 (2-3)
(2-3)
如果已知电动机和负载机械的机械特性,用图形法确定稳态的工作点就十分方便。有些机械的负载转矩与转速有关,例如图2-8a所示的风机的机械特性和驱动风机的异步电动机的机械特性。两条机械特性的交点A满足条件式(2-3),是风机稳定运行的工作点,转速稳定在ωA。
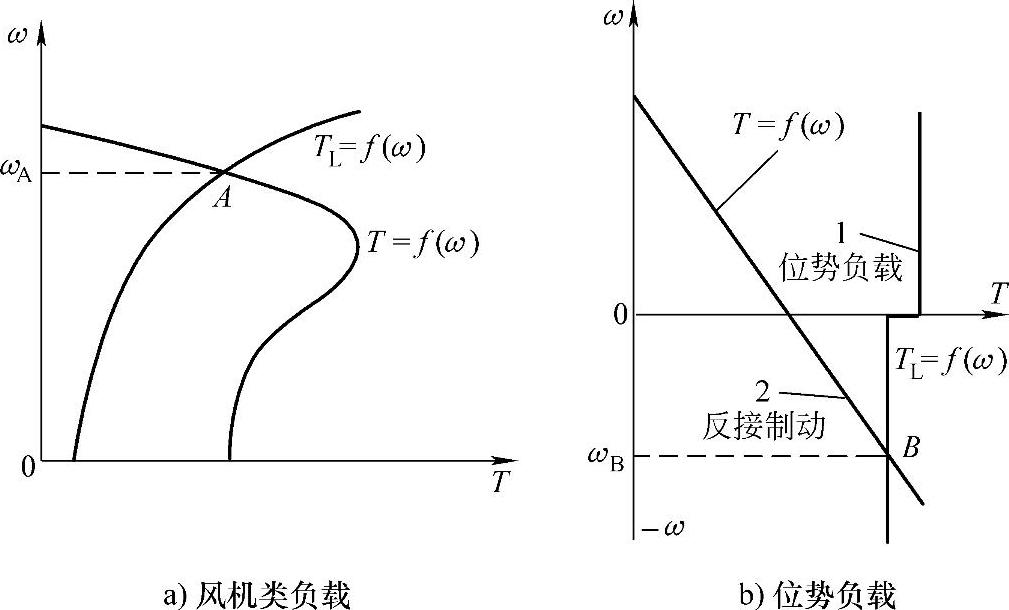
图2-8 用图形法确定电气传动稳定运行速度
图2-8b中的直线1表示带有位势负载的卷扬机在下放重物时(速度为负值)的机械特性。为了保证稳定的下放速度,电动机工作在反接制动工况,这时相应的机械特性为直线2。卷扬机的机械特性和电动机的机械特性的交点B满足稳定运行条件式(2-3)。转速稳定于ωB。
负载转矩分为主动型转矩TLa和被动型转矩TLp。主动型负载转矩是指由重力或风力产生的转矩(例如起重机、卷扬机、电梯或风力发电设备等机械)。主动型转矩可能阻碍运动,也可能促进运动。如果主动型转矩的方向和转速方向一致,则TLa的符号为正;如果主动型转矩的方向和转速的方向相反,则TLa的符号为负。被动型负载转矩是指工作机械的反作用力或摩擦力产生的转矩(例如机床和水泵类机械)。被动型转矩总是阻碍运动的。TLp的符号总是负的,当ω=0时,TLp=0。
全部负载转矩是由主动型转矩和被动型转矩构成,即
TL=TLa+TLp (2-4)
而各个转矩的符号要根据转速方向来确定。与转速方向相同,促进运动的转矩,其符号为正;反之则为负。
加到工作机械上的转矩是电动机发出的转矩T和负载转矩的代数和,即

怎样确定式(2-6)的符号呢?对于电动机发出的转矩,如果电动机工作在电动工况,T取正号;如果工作在发电工况,T取负号。对于主动型负载转矩,如果这个转矩是促进运动的(例如起重机在下放重物),TLa取正号;如果是阻碍运动的(例如起重机在提升重物),TLa取负号。
平移运动时的牛顿第二运动定律为 。旋转运动也遵循牛顿第二运动定律,这时转矩T代替力F,转动惯量J代替质量m。这时有
。旋转运动也遵循牛顿第二运动定律,这时转矩T代替力F,转动惯量J代替质量m。这时有
 (https://www.xing528.com)
(https://www.xing528.com)
转动惯量J是描述刚体绕轴转动的惯性的参数,单位是kg·m2。一个质量为mi的质点的转动惯量是该质点的质量与该质点到旋转轴距离ri二次方的乘积,一个刚体的转动惯量是构成该刚体的全部质点的转动惯量之和,即

转动惯量只取决定于刚体的形状、质量分布和转轴的位置,而与转动状态(如角速度的大小)无关。计算各种形状物体的转动惯量公式可以从手册或样本中查出。有时手册给出计算圆柱形物体的飞轮力矩GD2的公式。G是指转动物体的质量,单位为kg,D是指物体的直径,单位为m。转动惯量和飞轮力矩的关系为

与质量相比,直径对于转动惯量的影响更大些。因此低惯量的电动机往往被设计成转子的直径较小而长度较大的形状。反之,如果工作机械需要大的转动惯量,有时还需要在转动部分增加大惯量的飞轮。飞轮的直径较大,轴向长度较小,呈扁饼状。这样做的目的是使用相同重量的材料,可以得到较大的转动惯量。
如果转动惯量是常数,式(2-7)可以写成

基于这一事实,T∑决定了转动的角加速度,影响了旋转体的动态运动过程。因此,有时也把T∑叫做动态转矩。
由式(2-10)可以得到

式中 J∑——转动系上全部的转动惯量。
这个方程反映了牛顿第二运动定律,被称为电气传动的运动方程。
直线电动机做平移运动的电气传动的运动方程为

式中 F——直线电动机发出的力;
FL——作用在直线电动机动子上的负载力;
m——连接在直线电动机动子上全部运动部分的质量;
V——直线电动机动子的线速度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。