



根据使用场合、原理结构、功能特点、自动化程度等原则,电气传动可以有不同的分类方式。表1-1是按照不同原则对电气传动进行分类的结果。
表1-1 电气传动的分类表
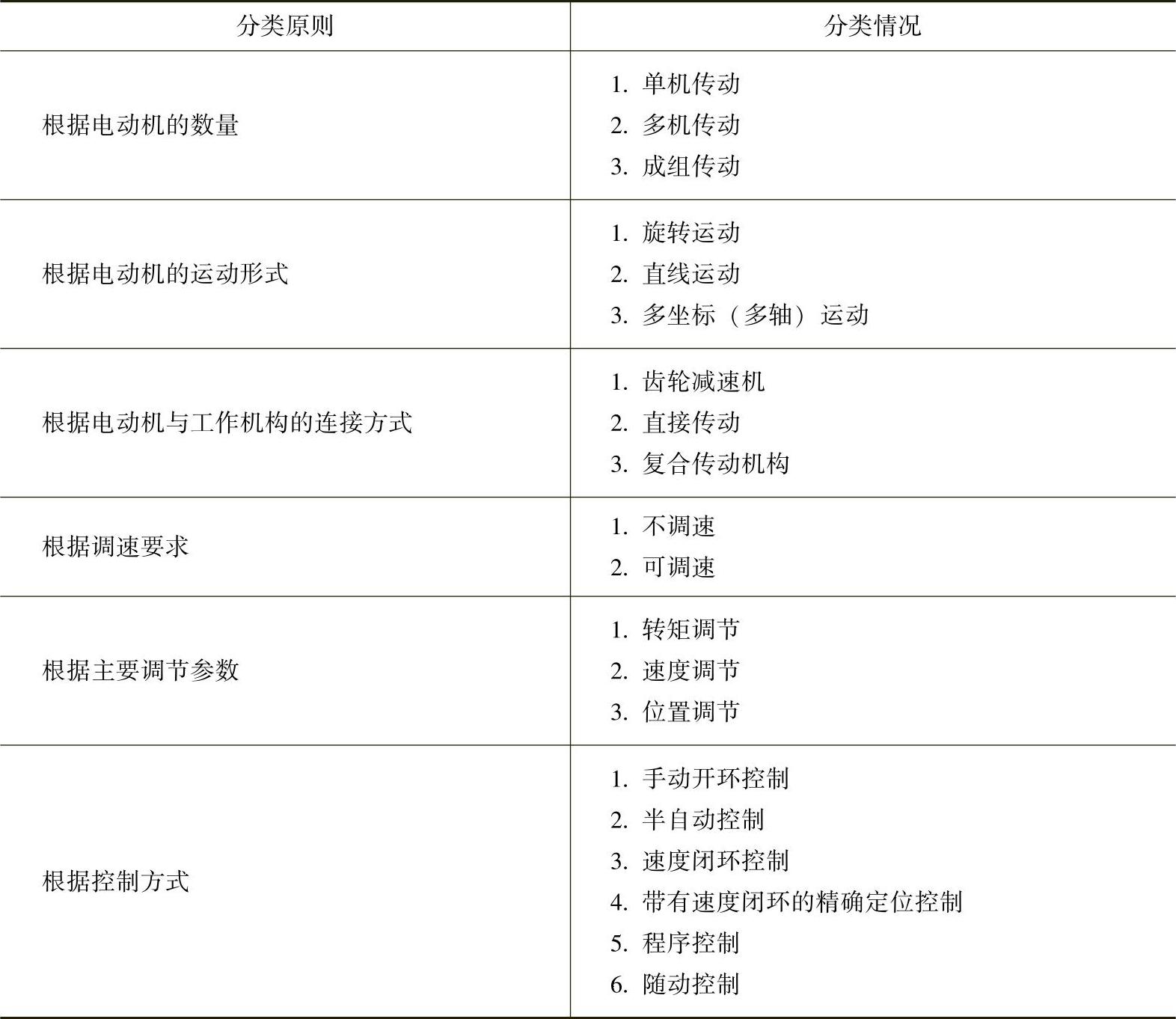
根据电动机的数量可以把电气传动分为单机传动、多机传动和成组传动。如果工作机械是由一台电动机驱动的为单机传动。如果一套工作机械由两台或更多电动机驱动的为多机传动。由于使用数台电动机驱动一套工作机构,必须使电动机的速度同步。最常见的技术手段是主从控制方式,主电动机采用速度控制,从电动机采用转矩控制。成组传动是由数台电动机驱动同一机械的几个工作机构,轧钢机左右压下机构的电气传动就是成组传动典型的例子。因为每个工作机构之间安装有离合器、变速器、制动器等机械传动机构,所以在对每个工作机构分别控制之时,还要对这些机械传动机构进行控制。所以说这是一种比较复杂的传动方式。
如果根据电动机的运动形式分类,大多数电气传动系统中都是使用旋转电动机。但是最近直线电动机越来越受到重视。因为很多工作机构属于平移运动或者往复直线运动,所以在这些工作机构上使用直线电动机就比使用诸如蜗轮-蜗杆、曲柄-连杆、滚珠丝杠等复杂的机械传动机构要方便得多。由于直线电动机的能量转换效率较低,重量和外形尺寸受限,所以在大型设备上还没有得到应用。功率半导体器件和变频器的发展,为直线电动机的应用开辟了新的机遇。直线电动机已经在机床领域得到广泛的应用。
多坐标(多轴)电气传动系统在数控机床和机器人方面的应用发展迅速。这种电气传动系统主要是由步进电动机或伺服电动机组成。多坐标电气传动系统能够使工作机构沿着几个坐标方向实现复杂的空间曲线运动。
电动机与工作机械的连接有直接连接方式和通过齿轮减速机的连接方式。此外还有通过其他复杂的机械传动机构实现连接的方式。直接连接方式的特点是工作机械要求的转速高,可以和电动机的额定转速相匹配,典型的例子是风机和水泵。采用齿轮减速机方式的主要原因是工作机械的转速低于电动机的额定转速,在实现减速的同时,传递到工作机械轴上的转矩也相应增大。一些对精度和动态性能要求很高的工作机械,为了消除减速机中齿轮间隙的影响,力求取消电动机轴与工作机械之间的机械传动机构。这被称为无减速机的直接传动。在这种方式中,需要降低电动机的额定转速,这样就增大了电动机的重量和外形尺寸。其原因是在相同功率的情况下,电动机的重量和外形尺寸大致与发动机额定转速成反比。
为了得到更高精度的电气传动系统,可将电动机与工作机械结合为一体,形成结构上一体化的电气传动系统。例如,磨床的主轴电气传动系统、电动汽车的电动车轮等。最近,出现了一个新的技术动向,就是采用机电模块的电气传动系统。所谓机电模块是指将一个工作机构与一个机电设备(电动机及其控制系统)构成一个具有整体功能的模块。这种模块多用于机器人和数控机床中。
从电气传动的发展历史来看,早期的电气传动设备都是由工频电源供电的笼型异步电动机(曾被形象地称为鼠笼式异步电动机)所驱动,这种电气传动设备无法调节转速和转矩。为了调速只能通过改变普通异步电动机的绕组结构,改变异步电动机的磁极数,制造出双速或三速异步电动机。这种调速方法被称为变极调速。这种异步电动机变极调速只能提供两种或三种固定的速度,无法实现平滑调速。与变极调速相类似的还有绕线转子串电阻调速,这种方法多用于绕线转子异步电动机的起动。这两种调速方法无法实现随时调节转矩和加速度,不属于本书所说的可调速电气传动的类型。
本书所采用的现代可调速电气传动的概念,应当包括如下功能:
(1)在指定的调速范围内可以根据需要改变速度;
(2)在负载扰动的情况下,也能够在指定的精度范围内稳定运行于速度设定值;(https://www.xing528.com)
(3)无论在电动工况还是在发电工况,都可以通过调节电动机的输出转矩实现加速和减速;
(4)在指定的精度范围内,可以按照ω=f(t)的函数关系实时地调节速度。
越来越多地使用可调速的电气传动,是当前电气传动的发展的大趋势。
根据不同的工艺要求,电气传动主要的调节参数是电动机的转矩、速度和位置。转矩(加速度)、速度、位置三个物理量之间存在着积分的数学关系。欲调节速度,必须从调节转矩入手;欲调节位置,必须从调节速度入手。这是电气传动调节的基本规律。
转矩是电气传动中重要的调节量,轧钢厂、造纸厂中使用的开卷机和卷取机是典型的采用转矩控制的生产机械。因为需要卷取(开卷)的金属带材或纸张需要恒张力控制,所以必须根据卷径的变化随时调节电动机的输出转矩。
电气传动中最常见的调节量是电动机的转速。需要调速的生产机械很多,其中常见的有机床、轧钢机、传送带、上料机等,风机和水泵出于节能的需要也要求调节转速。部分计算机外围设备和家用电器中的电动机也有调速的要求。
有的工作机械需要精确定位或者运动轨迹控制,这就是电气传动的位置控制。
可以将电气传动调速范围分为低调速范围(不超过2∶1)的电气传动;中调速范围(不超过100∶1)的电气传动;宽调速范围(1000∶1数量级)的电气传动;高调速范围(10000∶1或更高)的电气传动。根据工作机械的要求选择适当的调速范围,这样可以降低电气传动设备的成本。
根据生产机械的功能和复杂性,电气传动的控制系统可以有多种操作方式。手动开环控制是最简单的控制方式。这是由继电器-接触器构成控制系统,完成起动、停止、保护和联锁等功能。像前文所提到的排风机的控制,就属于这种类型。半自动控制系统是根据操作者通过操作按钮或其他操控器控制机械运转。这类控制系统中包含着自动控制的内容,以保证电气参数的自动变化。例如,工厂中的起重机采用绕线转子异步电动机转子绕组串电阻起动,操作者按下起动按钮,自动控制电路根据电流或时间逐级切换起动电阻,保证起动过程平稳。通常电气传动的控制系统对电流和速度进行闭环控制。在这种情况下,操作者只须根据工艺的状况设定给出速度的设定值,不必考虑闭环内部的调节情况。例如,矿山用电铲、轧钢机等生产机械属于这种类型。设定值也可以是电流或转矩,这时设定值可以由自动化控制系统给出。位置控制系统需要对位置闭环控制,以确保工作机构准确停止在指定的位置。位置闭环通常是速度闭环的外环,并用位置检测值作为闭环的反馈量。
如果由事先编制的程序控制工作机构的运动参数(速度或位置),这就是程序控制。程序控制需要用数字控制装置实现,数控机床中就是典型的程序控制的设备。
如果事先不知道工作机构运动规律,需要根据跟踪目标的参数向电气传动的控制系统下达设定值。在这种情况下,电气传动系统的功能是准确跟踪目标,这就是随动控制系统的概念。火炮自动瞄准系统要随时根据目标修正运动参数,轧钢机的电控压下机构要跟随轧材的厚度实时调节辊缝,这些都是典型的随动控制系统的例子。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。