



1.分选过程简介
为分选不同大小的盒子,可采用分选器。它从高的盒子中区别小盒子,将前者送到右面,后者送到左面。从结构观点看,它是由两个集成的基本单元:传送带机和旋转平台组成,如图6-96所示。
传送带机由电动机带动运行,它带动盒子向前,进入旋转平台。该电动机停止将保持直到旋转平台准备接受新的盒子。旋转平台由两个电动机相互操作,一个旋转电动机旋转平台,用于接收盒子和选择出口的方向;另一个传送电动机移动一些滚辊来确定送入的盒子在平台的中央位置,在旋转平台合适地旋转后推动盒子到它的出口方向。当没有盒子在平台上时,或跨越平台给料的边界时,这两个电动机停止,平台的方向保持在中央,准备接收新的盒子。
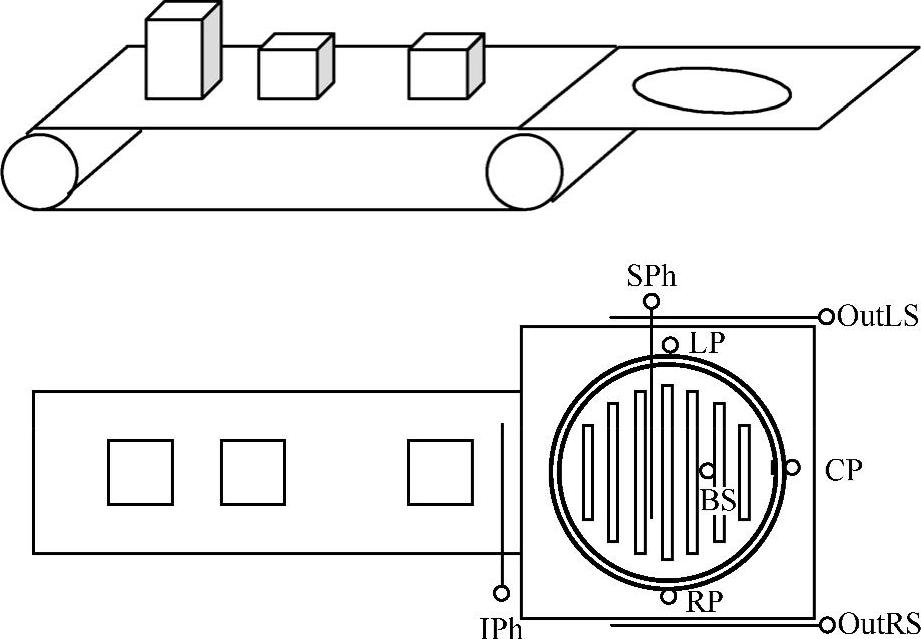
图6-96 分选器工艺过程示意图
盒子的大小和位置由合适的光电管来识别,供应到每个出口方向的盒子根据标志信号的状态从另一个盒子约定的出口送出。
注意一旦盒子从传送带进入到平台边界,一个光电检测元件IPh检测到该事件和盒子开始从加载阶段(Loading Phase),进入旋转平台。这表示平台传送电动机闭合,盒子移动到平台的中央,一个合适的传感器BS检测到已经到了中央位置。然后,平台传送电动机再次停止。
来自另一个光电检测元件SPh的信号提供盒子高度的信息,并选择出口的方向。当平台旋转电动机动作时,根据被选择的方向可以正转或反转,直到所选的方向达到,并被合适的传感器(LP或RP)检测到。然后,旋转电动机停止,传送电动机运转,盒子被推动到达它的出口(即处于非加载阶段Unloading Phase),提供有关的出口标志(OutLS或OutRS)变为绿色(TRUE)。当盒子最后离开平台后,平台的传送电动机停止,而旋转电动机再次用于旋转平台到中央位置,由CP传感器检测。
2.程序设计和优化
(1)定义输入、输出变量和数据类型
表6-18列出分选器控制系统的变量和数据类型。
表6-18 分选器控制系统的变量和数据类型

表中,输出变量PlatRM假设有3个值,即-1、0和1,分别表示电动机向左转(逆时针)、停止和向右转(顺时针)。实际应用时,采用两个布尔变量PlatRML、PlatRMR,为1表示左转和右转,该两个变量同时为0表示停转。
对出口标志,可采用两个后续的传送单元,用于接收和传送高和小的盒子,并用TRUE和FALSE命名,表示准备和忙碌,它们对于分选器是输入信号。
(2)控制系统设计
1)状态图。分选器的行为可表示为下列两个阶段的交替:
①向前的阶段:当盒子跨越传送带与旋转平台的边界,它的高度被检测和被推向合适的出口方向。
②向后的阶段:旋转平台返回到中央位置和传送带再次运行。
图6-97用状态图描述分选器的各状态和两个阶段。其中,实线表示向前的阶段,虚线表示向后的阶段。
状态图确定7个有意义的系统状态,用圆表示。其主要意义如下:
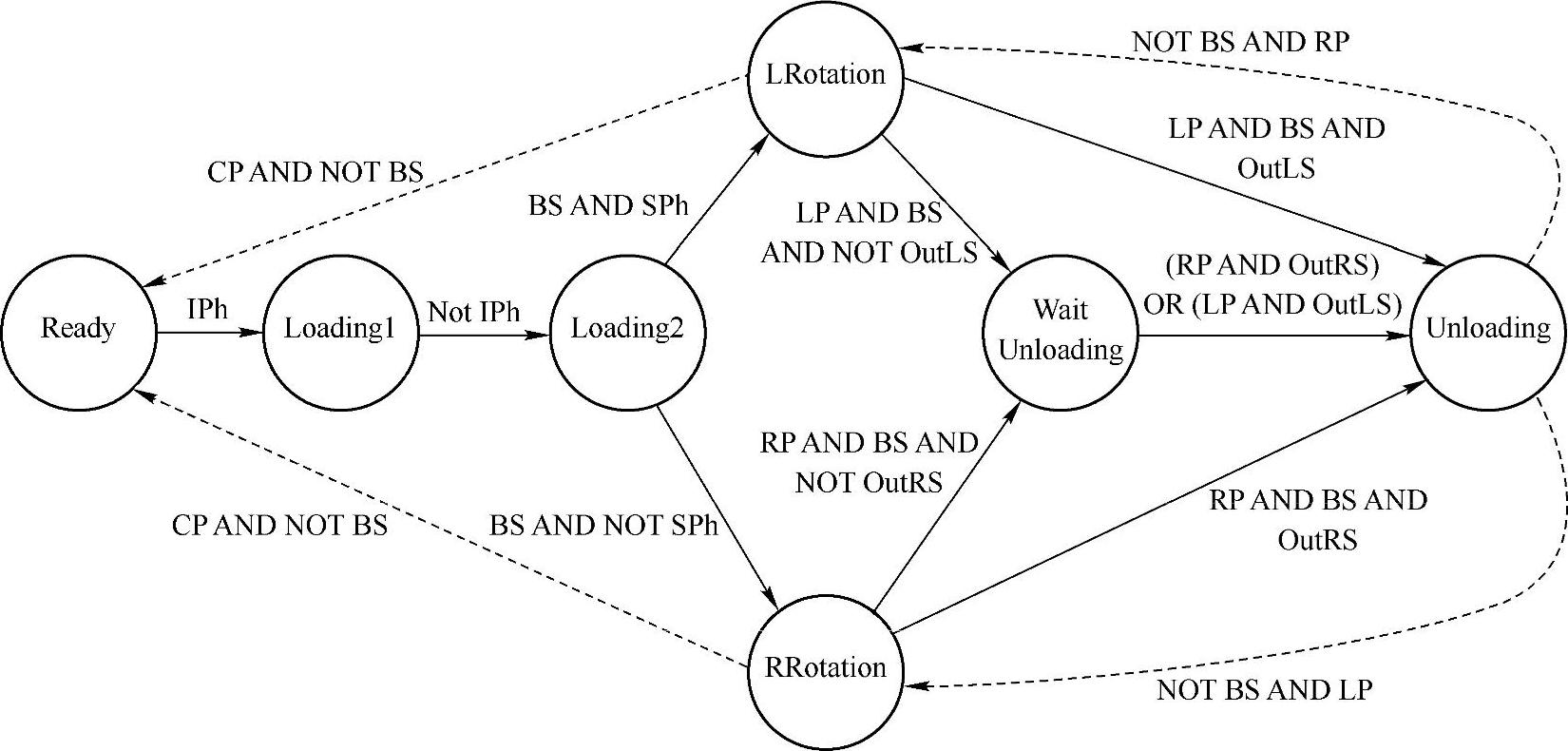
图6-97 分选器状态图和两个阶段
①Ready:该状态时,传送带机开始运行,而旋转平台电动机停止。
②Loading1:该状态表示盒子跨越传送带与旋转平台时的状态,为了将盒子送到平台,平台传送电动机运转是必要的。
③Loading2:一旦盒子已经完成装载到旋转平台,传送带电动机就应停止直到平台的滚辊继续工作。
④LRotation:左转,如果盒子大小是高的,则在盒子达到平台中央和平台传送电动机停止后起动,另一个左转是在反向阶段,它移回平台从右面到中央位置(准备位置)。
⑤RRotation:右转,如果盒子是小的,在盒子到平台中央和平台传送电动机停止后起动,另一个右转是在反向阶段,它移回平台从左面到中央位置(准备位置)。(https://www.xing528.com)
⑥Unloading:盒子已经到底最终传送的位置。因此,平台旋转电动机停止,平台传送电动机开始运转,系统保持该状态直到盒子完全离开平台。
⑦WaitUnloading:该状态在盒子已经到达最终传送方向但是旗语显示下一单元正在改变时才达到。系统将等待旗语的变化,然后就移入Unloading状态。
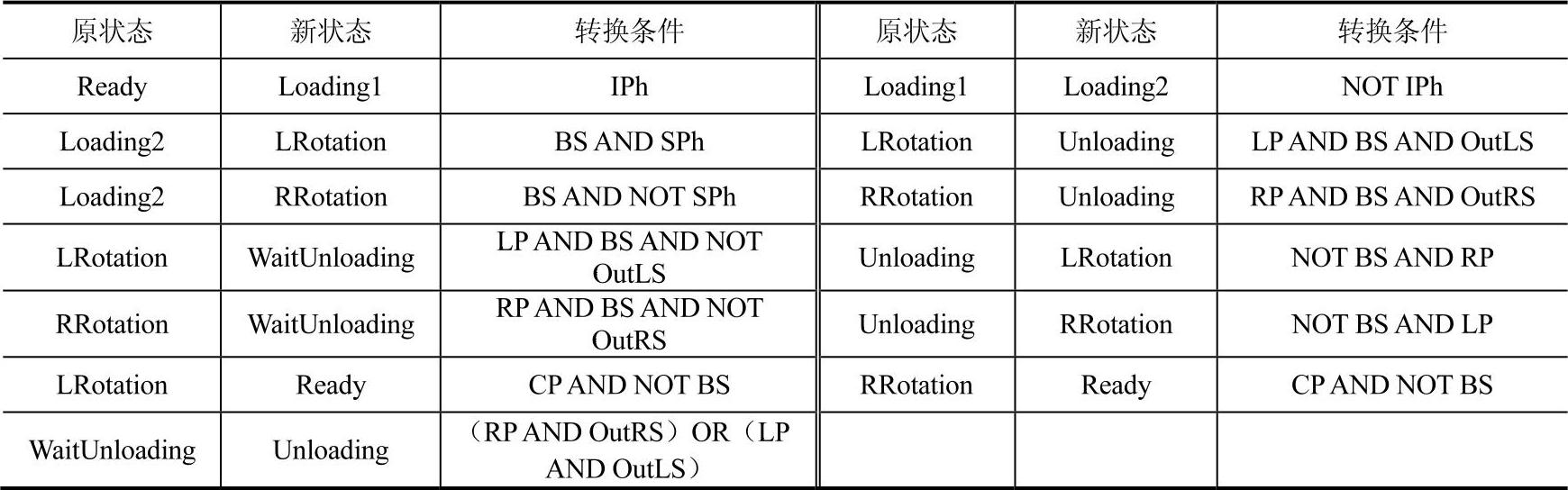
2)确定状态、转换条件和动作控制功能块。根据事件确定状态的传递。表6-19显示状态和转换条件关系。
表6-19 分选器状态和转换条件的关系
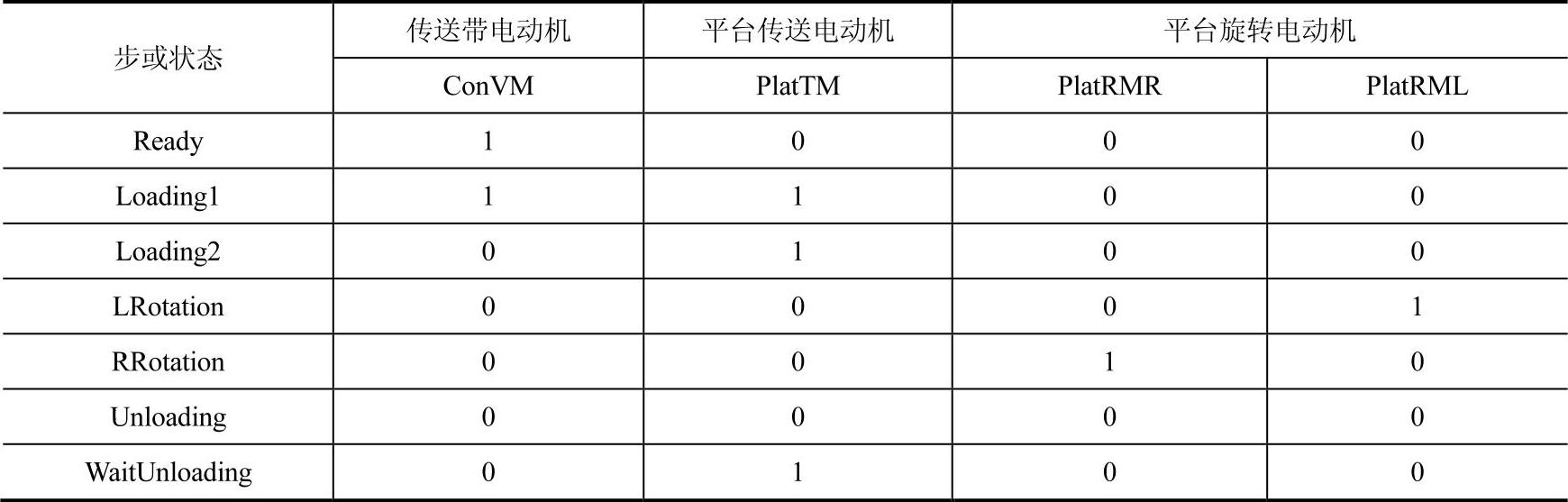
为完成系统行为的表示,表6-20列出各步连接的动作和其意义。
表6-20 分选器状态和动作的意义

3)SFC。根据分析分选器的控制过程,该过程可表示如图6-98所示,结合表6-19和表6-20,可编写分选器的顺序功能表图。转换条件表见表6-21。动作控制功能块见表6-22。
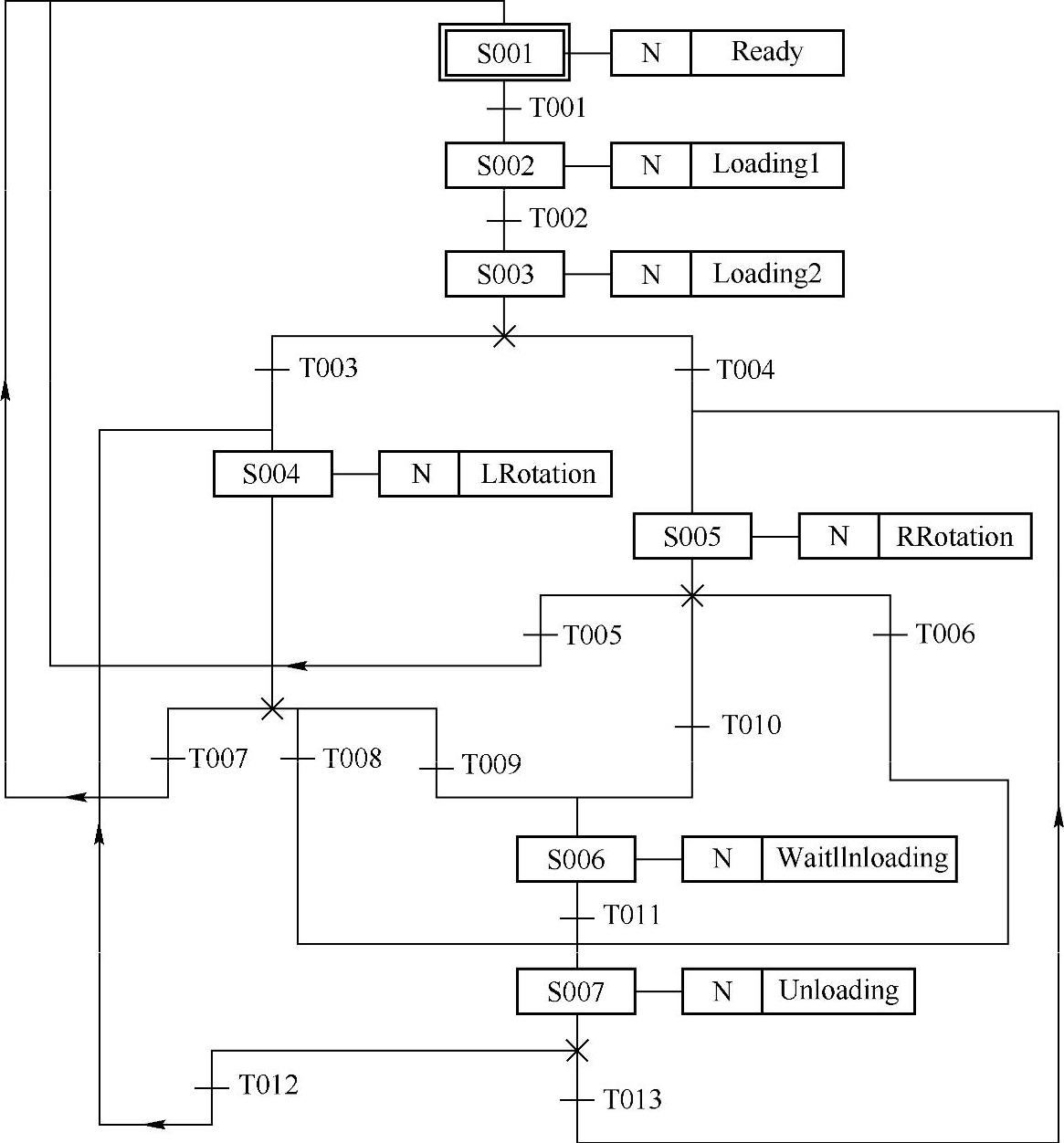
图6-98 分选器控制的SFC
表6-21 分选器的转换条件
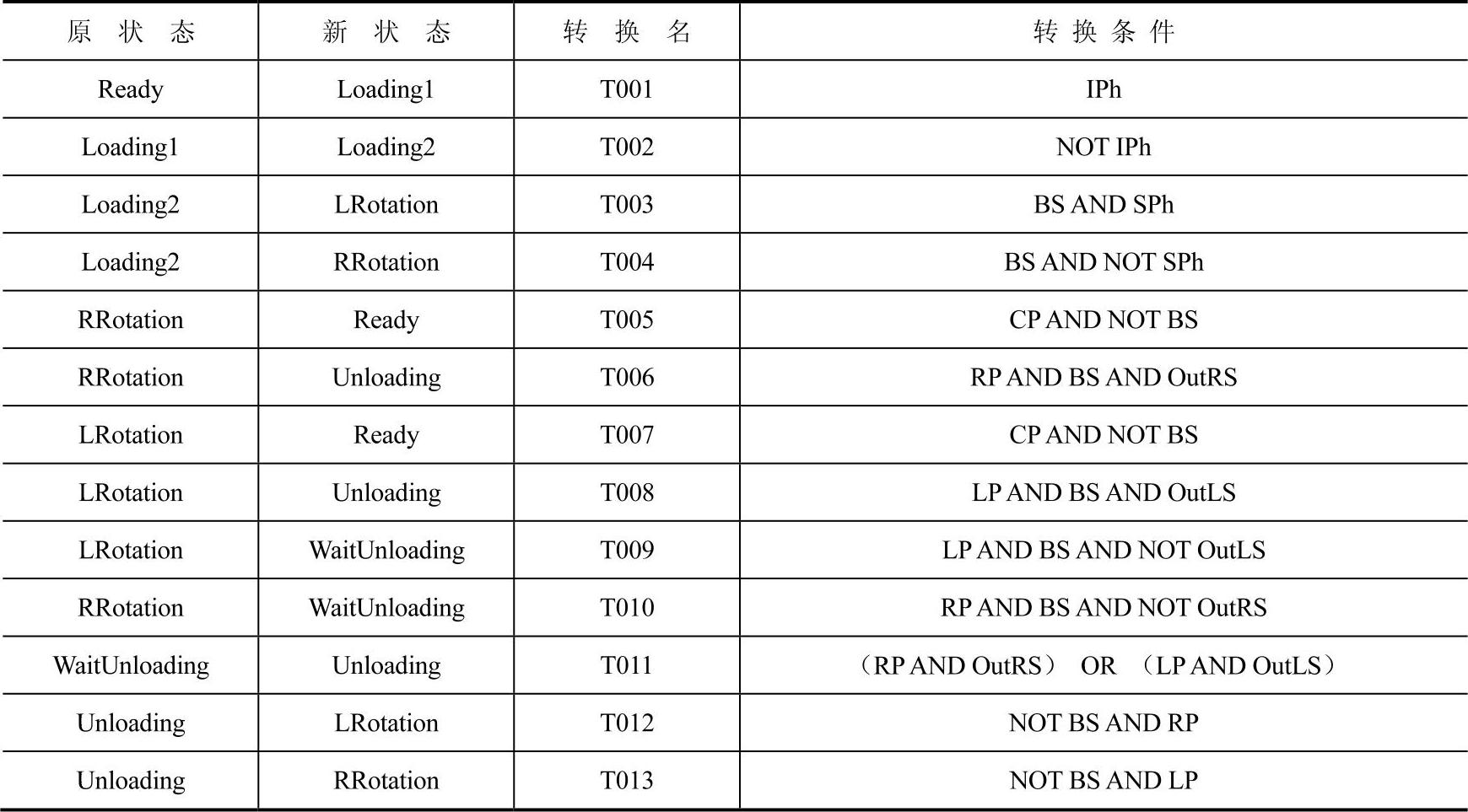
表6-22 动作控制功能块
根据上述的转换条件和动作控制功能块,在SFC的基础上可直接编写有关程序实现。
4)SFC的优化。实际应用时,可考虑对分选器控制系统进行优化,以提高系统效率。例如,考虑一旦盒子在平台的旋转步时,传送带电动机就可将下一个盒子传送到使IPh为1。这样,当旋转平台回复到CP位置时,就能进行下一次的分选。这种优化可缩短操作时间,提高分选效率。
仅有当两个盒子之间的距离没有足够来确保它们的分离时才应停止传送带机的传送。因此,当平台仍在处理前一个盒子时,下一个新盒子到的IPh的情况可用IF语句进行识别。
为此,可增加一些步或状态,定义一个新的状态图;也可采用原状态图,但增加新的有关其状态的动作。图6-99是经改进后的状态图。
改进后的动作控制功能块见表6-23。转换条件可从图6-97直接列出,不再多述。
表6-23 经改进后的动作控制功能块
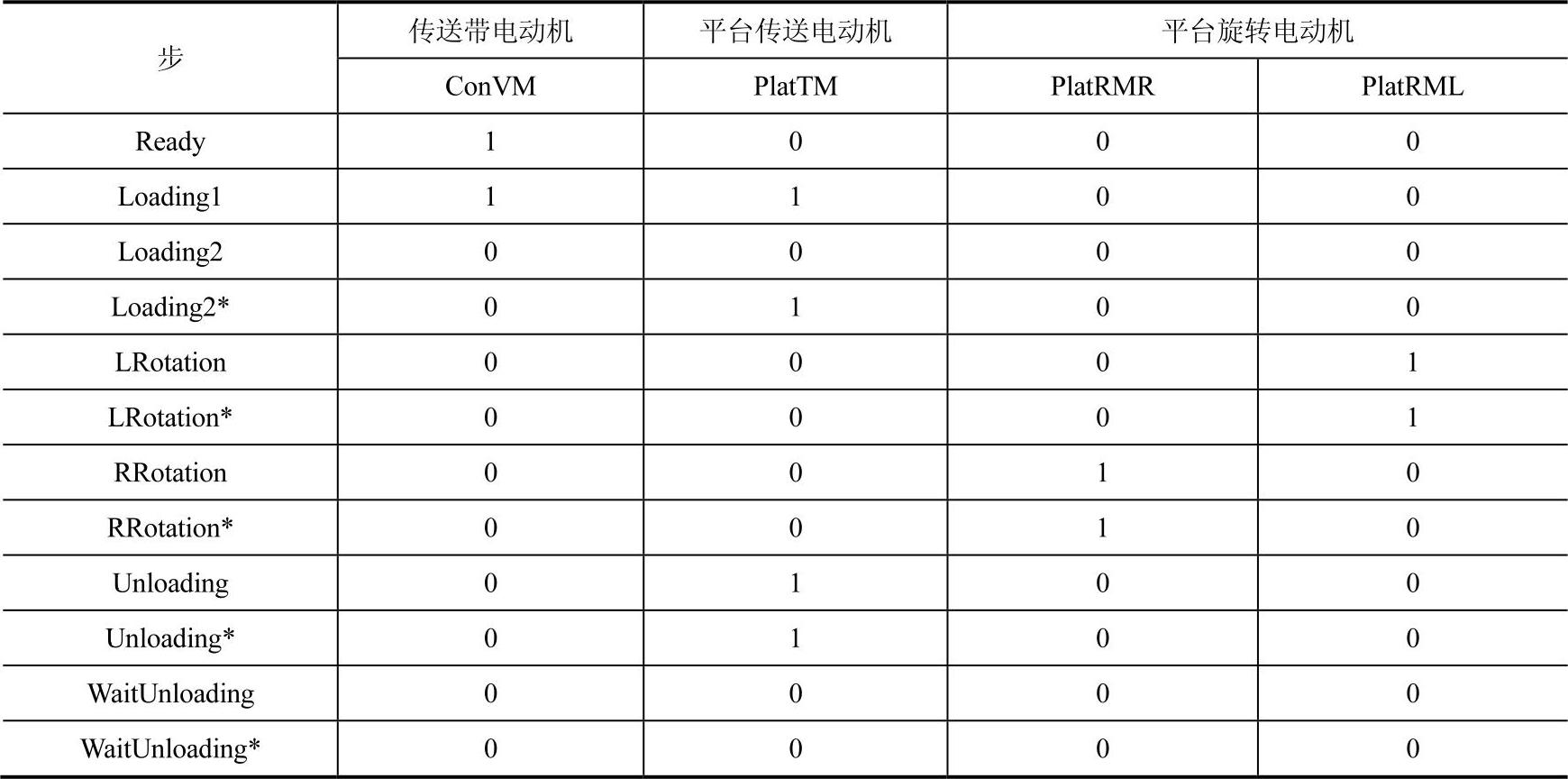
注:表中带符号*的步表示改进后的。
实际应用时,可增加判别语句实现。如在S004、S005、S006和S007步增加下列语句:
IF IPh THEN ConvM:=0;END_IF;
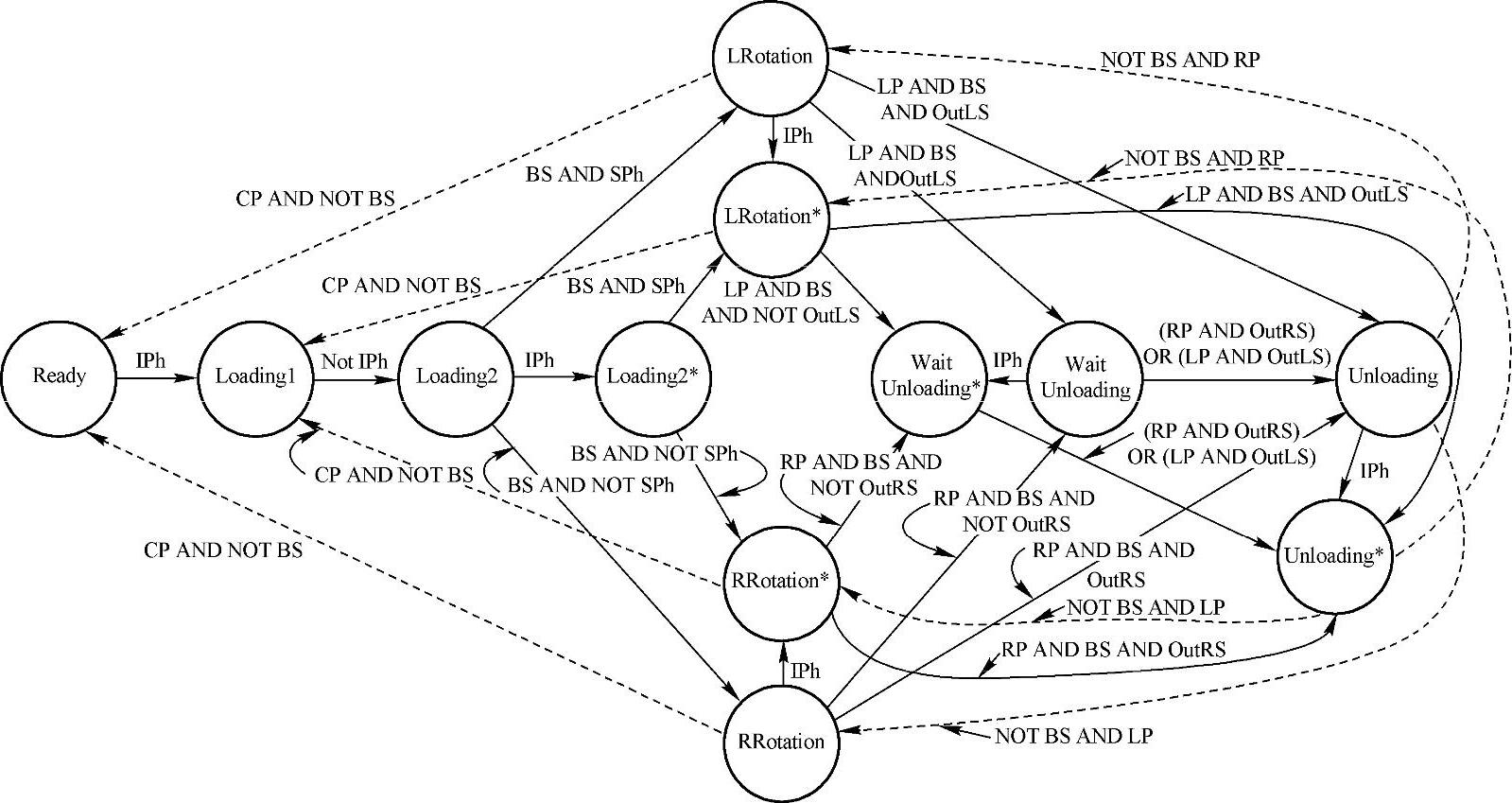
图6-99 经改进后的状态图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。