



1.模糊控制类型
PLC中常采用模糊控制与传统PID控制结合,以改善控制系统的控制品质。应用示例如下:
(1)预先控制
预先控制(Pre-Control)的控制方案如图5-47所示。图中,模糊控制功能块与常规PID控制器组合,由模糊控制功能块提供一个校正信号,补充常规PID控制器。
这里,模糊控制器利用偏差和偏差的微分实现模糊控制,并作为前馈信号,组成类似前馈-反馈的控制系统。
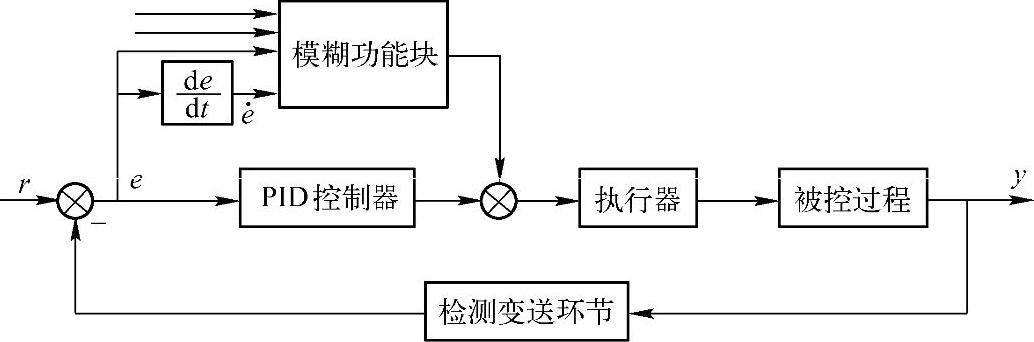
图5-47 模糊控制用于预先控制
(2)常规PID控制器的参数自整定
图5-48显示用模糊控制功能块的输出作为常规PID控制器的参数自整定的控制方案。
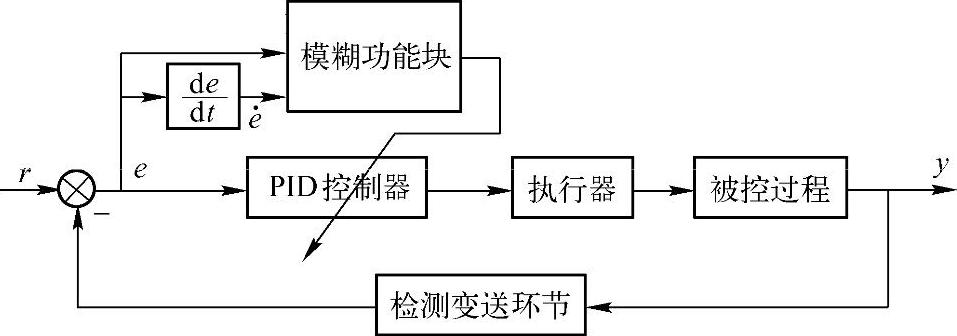
图5-48 模糊控制用于常规PID参数自整定
(3)直接用模糊功能块组成模糊控制器
这类控制系统应用生产过程的经验知识和语言控制策略,组成模糊控制系统,常用于需要操作员干预的许多生产过程的控制。图5-49是直接模糊控制框图。采用偏差和偏差微分的控制方案是最常用的直接模糊控制方案。
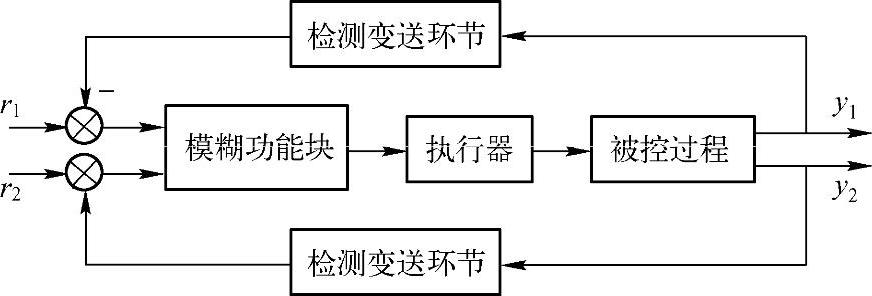
图5-49 直接模糊控制
2.模糊控制应用示例
工业生产过程中,常采用被控变量液位LEVEL的偏差E1和偏差的微分DE1作为模糊控制器的输入信号,用VLV作为模糊控制器的输出。下面是一个示例。
(1)模糊化
可将偏差E1和偏差微分DE1分为五段。其隶属函数如图5-50所示。
根据图5-50确定隶属度的方法如下。假设输入E1为4,DE1为2,则从图5-50可得E1为4时PS隶属度是8/9,PL隶属度是1/3,其他项的隶属度为0。转化为语言变量的值为{0,0,0,0.89,0.33},或表示为“正小,稍偏大”。DE1为2时PS1隶属度是2/3,DE1为2时ZO1隶属度是1/3,其他项的隶属度为0。转化为语言变量的值为{0,0,0.33,0.67,0},或表示为“偏正,接近零”。(https://www.xing528.com)

图5-50 输入变量的隶属度函数
(2)清晰化
输出变量VLV也分为五段,其隶属函数如图5-51所示。
(3)推理规则
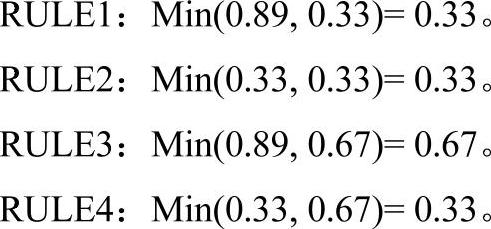
1)聚集:用于确定前件的符合程度。例如,可列出下列规则:
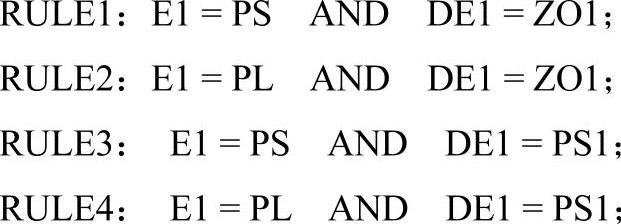
如图5-51,对E1=4及DE1=2,采用聚集原理,用MIN算子,有
2)激活:用于确定结论的满足程度。由于未采用单点集作为输出,因此,该项未用。
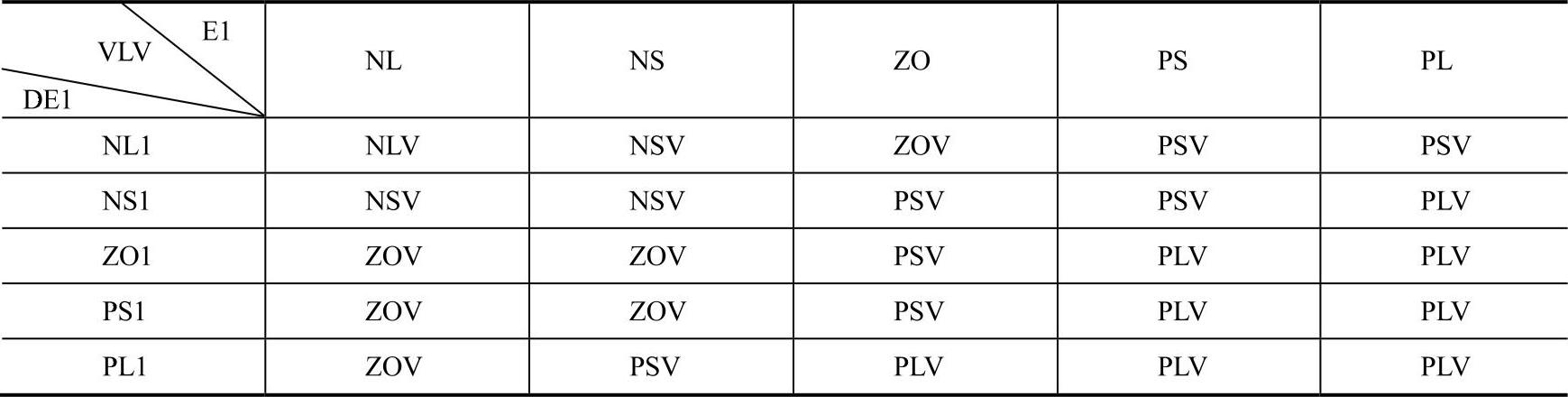
3)综合:采用MAX算子。如果有两个输入和一个输出,且两个输入变量仅以AND结合,则规则库可用矩阵形式,例如,可获得表5-53所示输入变量和输出变量之间的模糊关系。需注意,表中输出变量的值与执行器的形式有关。例如,NLV可表示控制阀全开,PLV表示控制阀全关等。

图5-51 输出变量的隶属度函数
表5-53 输入变量和输出变量之间的模糊关系
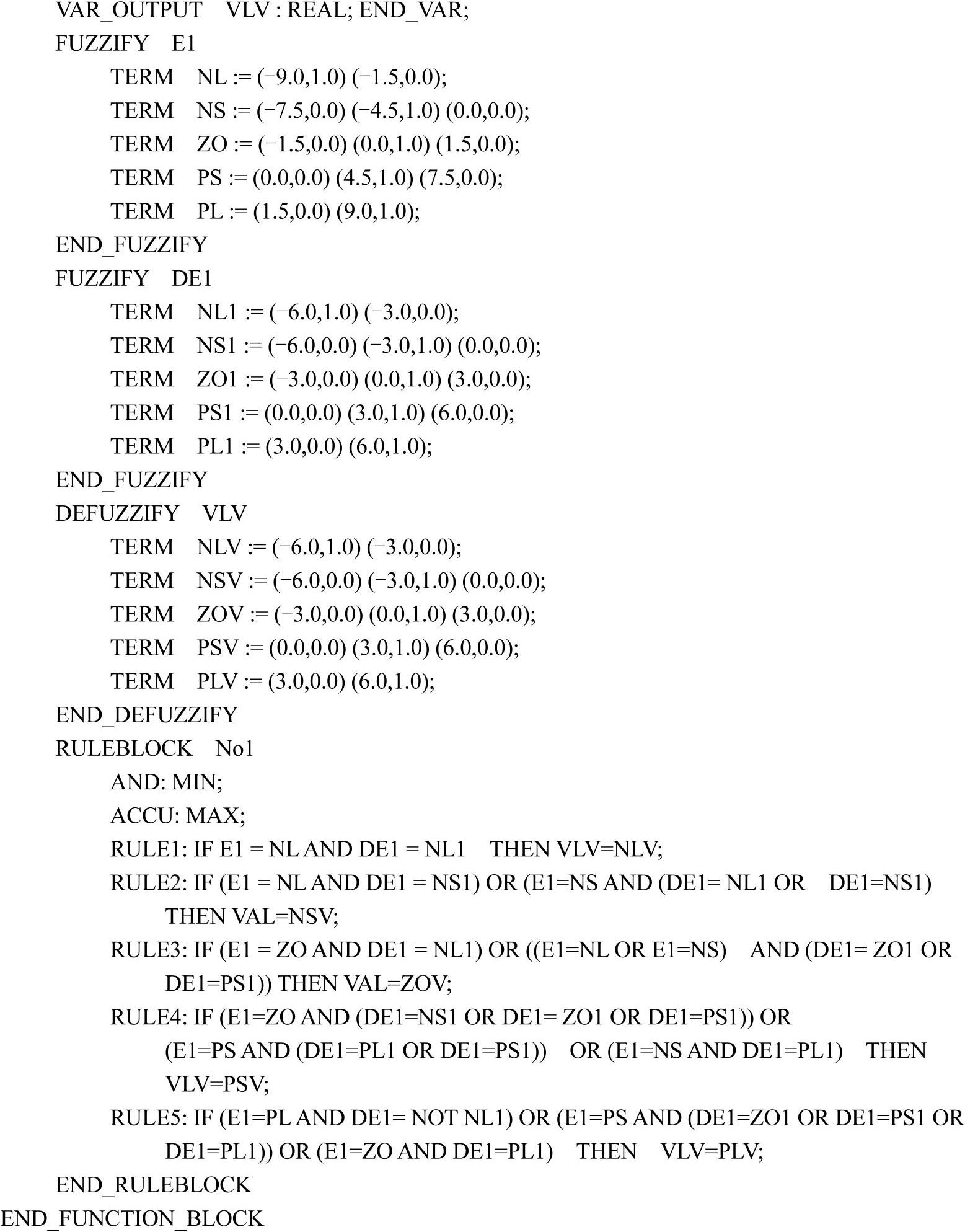
(4)编程

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。