



1.获取SAFEBOOL信号
为实现安全功能,PLCopen功能块和外围设备的连接需经故障检测等设备,以获取SAFEBOOL信号。
输入的触点可以是请求和具有保护、故障检测能力的安全输入的常开或常闭触点输出的组合,必须执行附加的故障检测,可在信号处理功能块内,也可通过分离的SF_Equivalent或SF_Antvialent功能块执行。
安全控制功能块用黄色背景色表示警告和安全功能。
(1)两个常开触点
实施方案有多种。图5-36是两个常开触点(1oo1)获取SAFEBOOL的连接图。
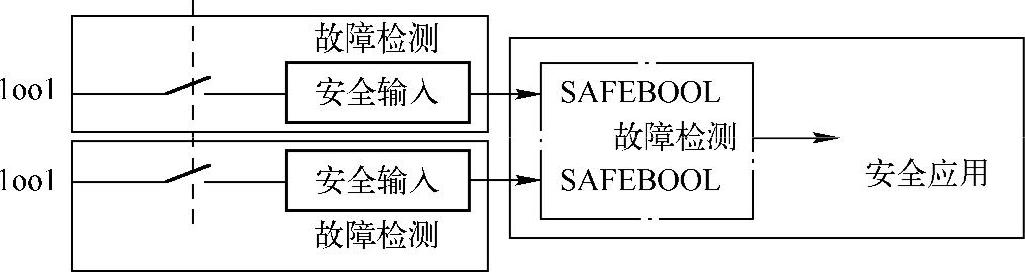
图5-36 两个常开触点(1oo1)获取SAFEBOOL信号
图5-37是两个常开触点(1oo2)获取SAFEBOOL的连接图。

图5-37 两个常开触点(1oo2)获取SAFEBOOL信号
(2)两个常闭触点
实施方案有多种。图5-38是两个常闭触点(1oo1)采用安全功能块SF_Equivalent获取SAFEBOOL的连接图。

图5-38 两个常开触点(1oo1)获取SAFEBOOL信号
图5-39是两个常闭触点(1oo1)采用安全功能块SF_GuardMonitoring获取SAFEBOOL的连接图。
(3)一个常开触点和一个常闭触点
图5-40是一个常开触点和一个常闭触点采用SF_Antivalent获取SAFEBOOL的连接图。
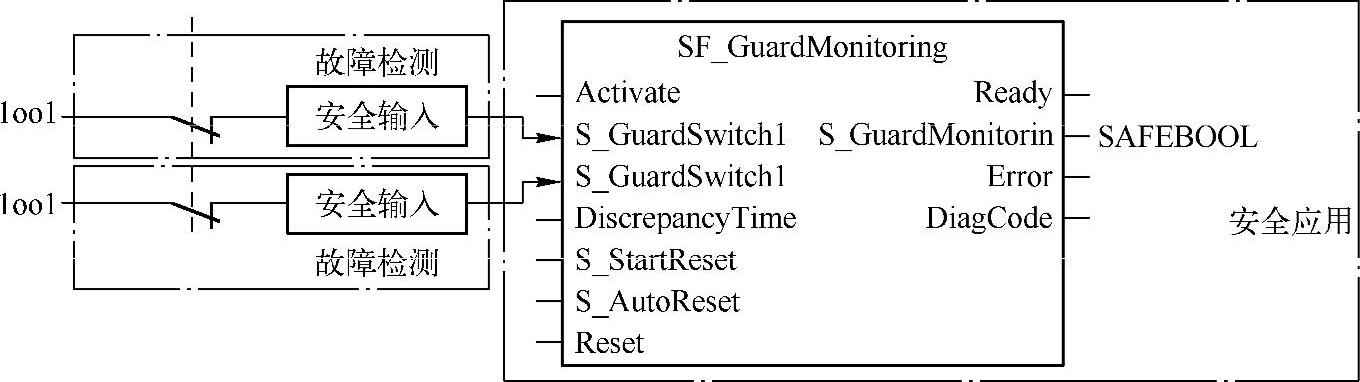
图5-39 采用安全功能块SF_GuardMonitoring获取SAFEBOOL信号

图5-40 一个常开触点(1oo1)和一个常闭触点(1oo1)获取SAFEBOOL信号
2.安全驱动器
安全驱动器是内置安全功能的驱动器。在安全功能没有被激活和安全功能被激活的模式之间,安全驱动器是不同的。此外,在安全模式下,可能有不同的安全功能。在安全功能之间的转换由安全驱动器内部的状态机处理,并有不同的优先级。
实现安全功能的输出可采用下列安全功能块:SF_SafeStop1、SF_SafeStop2和SF_SafeLimitedSpeed。对离散输入输出接口可以用SF_SafeRequest功能块。
安全停止功能既可采用SF_SafeStop1,也可采用SF_SafeStop2;还可采用SF_SafelyLimitedSpeed实现合成的安全停止功能。
例如,由于操作员希望进入危险区域去清除材料的堵塞,只得请求安全运行,这时就可执行SF_SafeStop1或SF_SafeStop2。但为了从机器中取出材料,机器运行时,操作员使用使能开关,来激活SF_SafelyLimitedSpeed功能,使机器能够以安全限速规定更低的速度运行,以保证安全。这时,安全驱动器将执行故障安全动作,使机器的速度降低。
安全驱动器内部的状态机由制造商规定,用于处理它们的控制和状态信号,它们通过隐含在系统级的接口在安全驱动器和控制系统之间进行信息交换。因此,用户不需要对每个位进行编程,安全功能块提供必要的接口。
隐含在系统级的接口可利用分散的输出设备,但大多数需要用数字的现场总线接口。图5-41是安全驱动器隐含的接口和安全功能块实例的执行器之间的关系。
图中,将安全应用与标准的功能应用分离。从安全功能的观点,可见安全和标准变量影响安全相关功能。这里,标准的变量不影响安全,因为,它不会使安全相关功能动作。安全传感器的信号经安全输入,被分类到安全相关功能和指定的安全应用,而不管它们属于功能应用还是安全应用。标准输入被送到功能应用,而用于安全功能的标准信号转换并衍生出符合安全应用要求的安全输入信号,也送到安全应用。
从功能应用和标准输入信号获得的派生变量和不属于规定的安全功能信号,例如Reset(复位)、Diagnosis(诊断)信号,在两个应用界面之间被简化。
隐含的系统接口信号通过功能块实例在图中表示,它没有用变量表示。
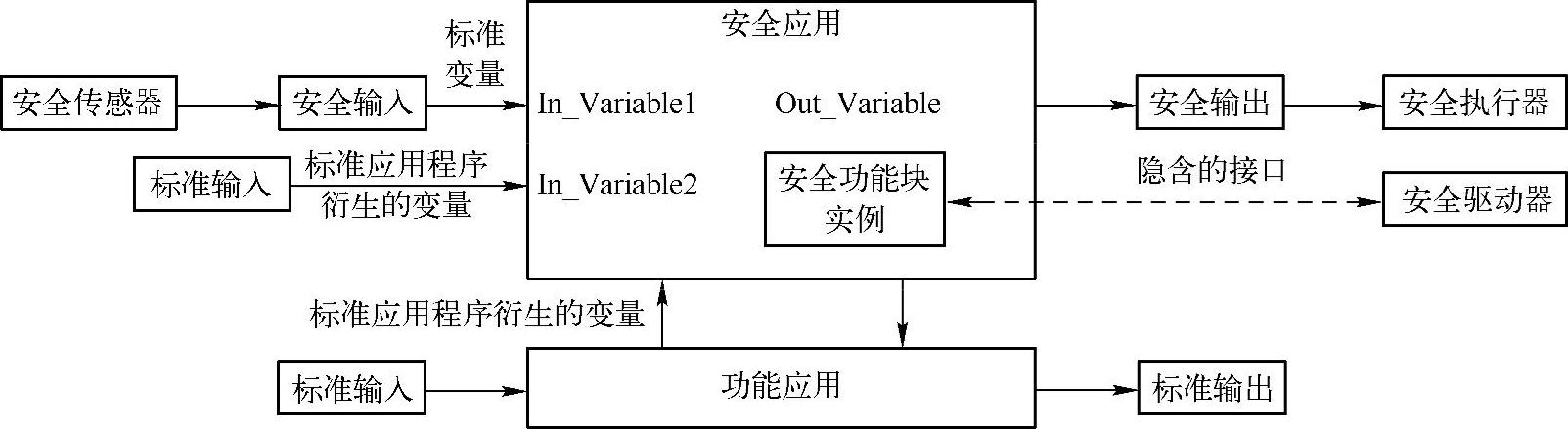
图5-41 安全功能的结构模型(https://www.xing528.com)
3.带隐含接口的安全紧急停车
(1)安全功能要求
某安全控制系统由两个电子驱动系统组成的机器组成。操作员要进入驱动系统的工作区域内,进行例如诊断处理,设置或清除堵塞的材料等工作。
操作员在进入危险区域前,要启动带联锁保护锁定的联锁保护系统,以完全停止驱动系统的运行。紧急情况时,操作员应根据EN60204停止的分类1停止驱动系统的运转。
操作员通过模式选择器选择自动模式或设置模式。安全功能的要求如下:
1)设置模式。
①进入危险区域的保护门能被打开,驱动系统允许使用使能设备(经SF_EnableSwitch)来启动安全限速功能(经SF_SafelyLimitedSpeed)。
②根据EN60204的停止分类1,紧急停车(经SF_EmergencyStop)动作叠加到所有其他安全功能和设置驱动系统进入安全停车(经SF_SafeStop1)。
③紧急停车后,机器再起动只能在紧急停车按钮释放后和经SF_EmergencyStop给出复位(Reset)信号。
④驱动器本身必须保证安全,不得超出安全限速(如果运动控制命令的值大于参数化限制值,驱动系统独立地执行故障安全动作)。
⑤如果没有使能信号(经SF_EnableSwitch),只要选择设置模式,驱动系统就停留在安全停止模式,经SF_SafelyLimitedSpeed,被监视的速度值为零。这时,根据EN60204的停止分类2,SF_SafelyLimitedSpeed功能块将驱动器设置在一个安全操作的停止,并像SF_SafeStop2功能块一样动作(激活)。
2)自动模式。
机器的正常操作只有在自动模式(经SF_ModeSelector)、保护门已关闭(经SF_Guard Monitoring)和锁定(经SF_GuardLocking)时,机器才能够正常操作。
(2)变量声明
表5-44是变量声明和描述。由表5-44可见,共有安全输入变量8个、标准输入变量2个,安全输出变量1个、内部的就地安全变量9个及用于安全功能块实例名的变量4个。
表5-44 变量声明和描述

(3)图形描述
图5-42是该示例安全应用的图形描述。
(4)安全应用程序
程序的变量声明如下:
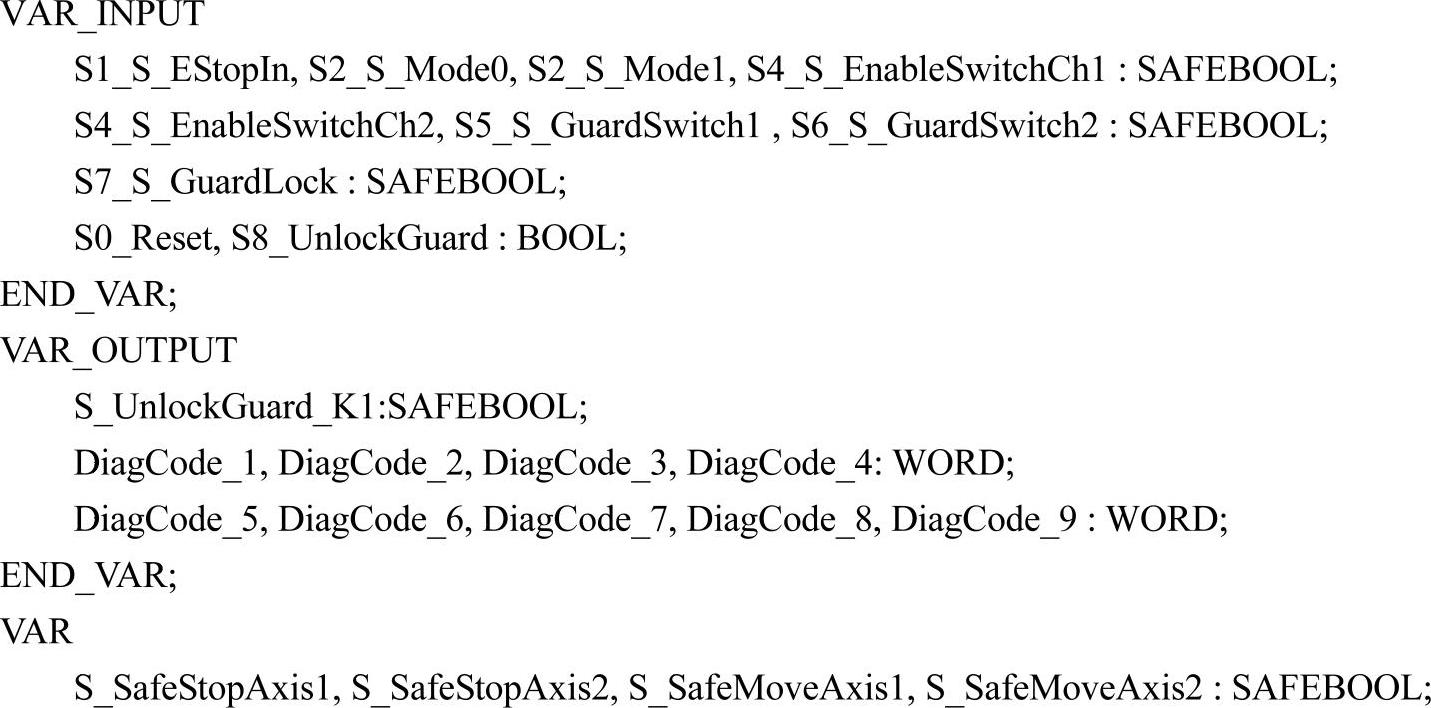
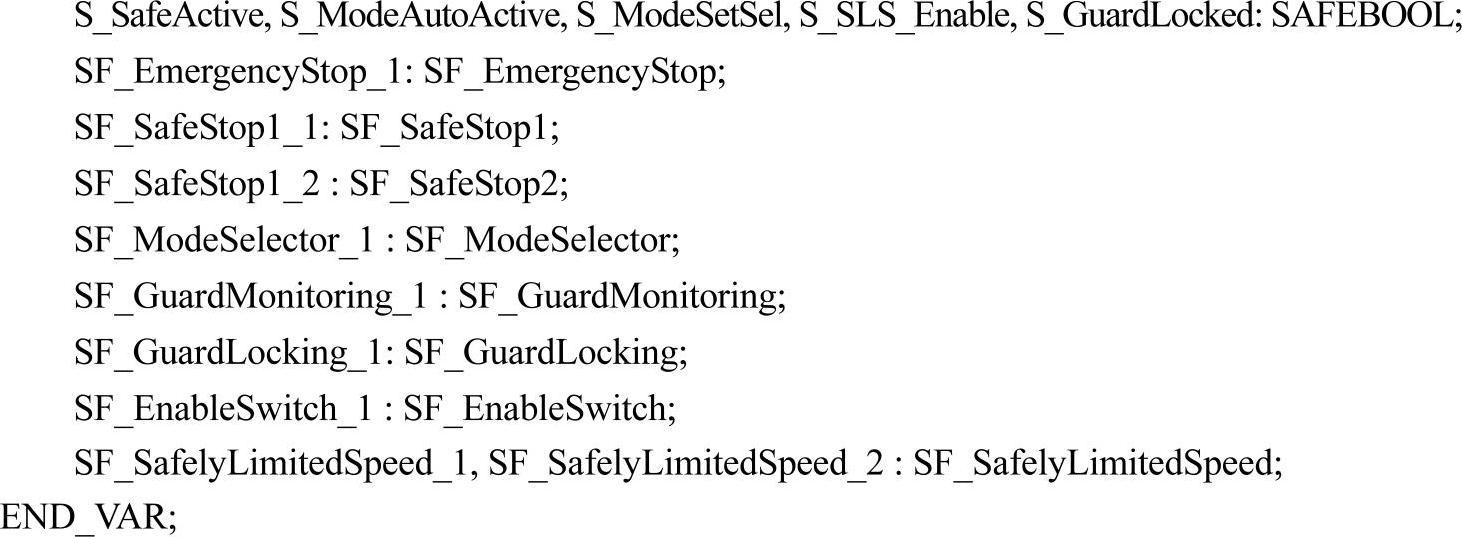
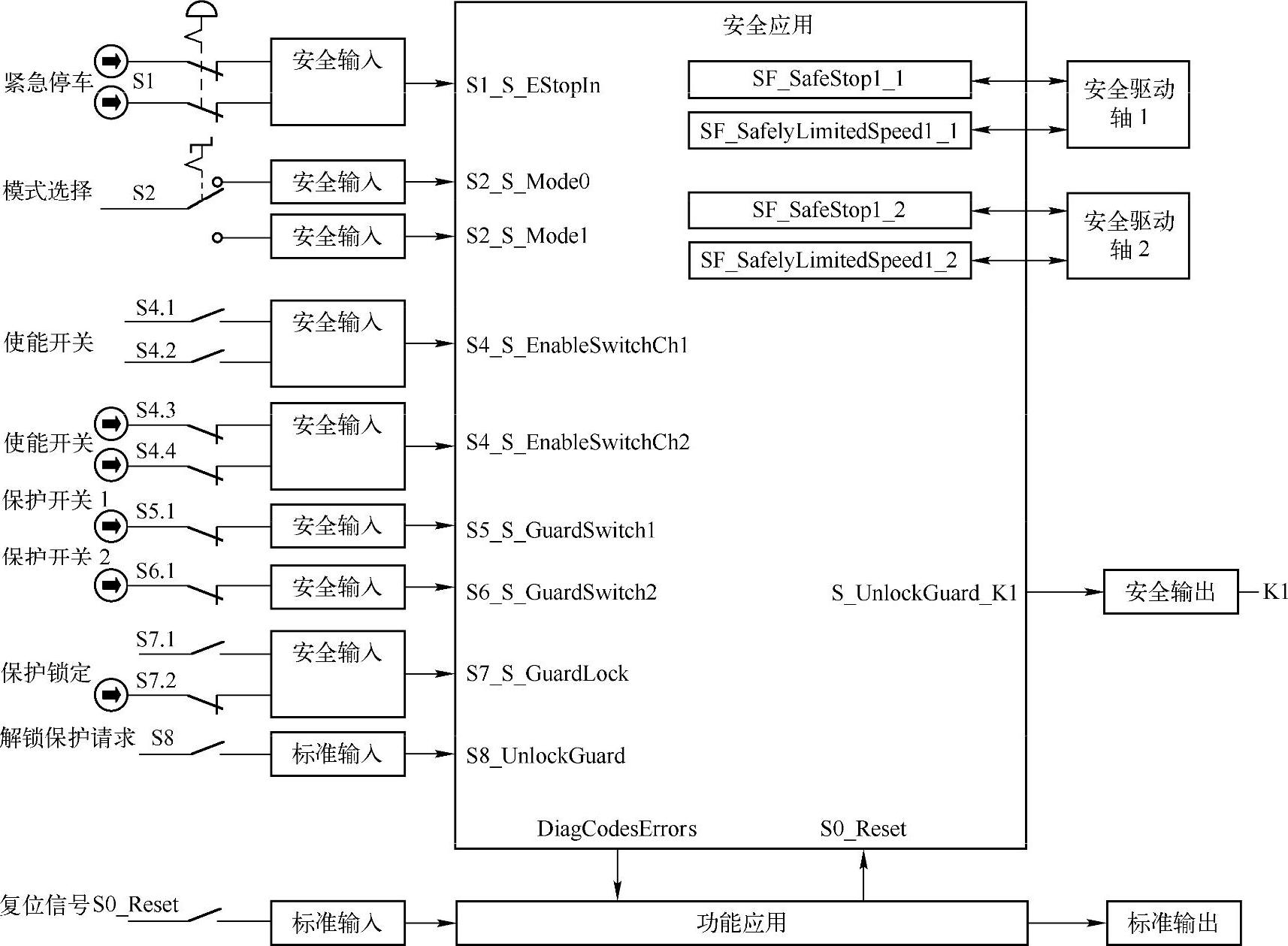
图5-42 安全运动应用示例的图形描述
用FBD编程语言编写的程序本体如图5-43所示。图中,SAFEBOOL变量用带背景色变量表示。
需说明,程序中的激活输入信号都被设置为TRUE,实际应用时,可用一个变量替代。图中,安全功能块实例名用带背景色变量显示。同样,安全布尔变量SAFEBOOL也用带背景色变量显示。
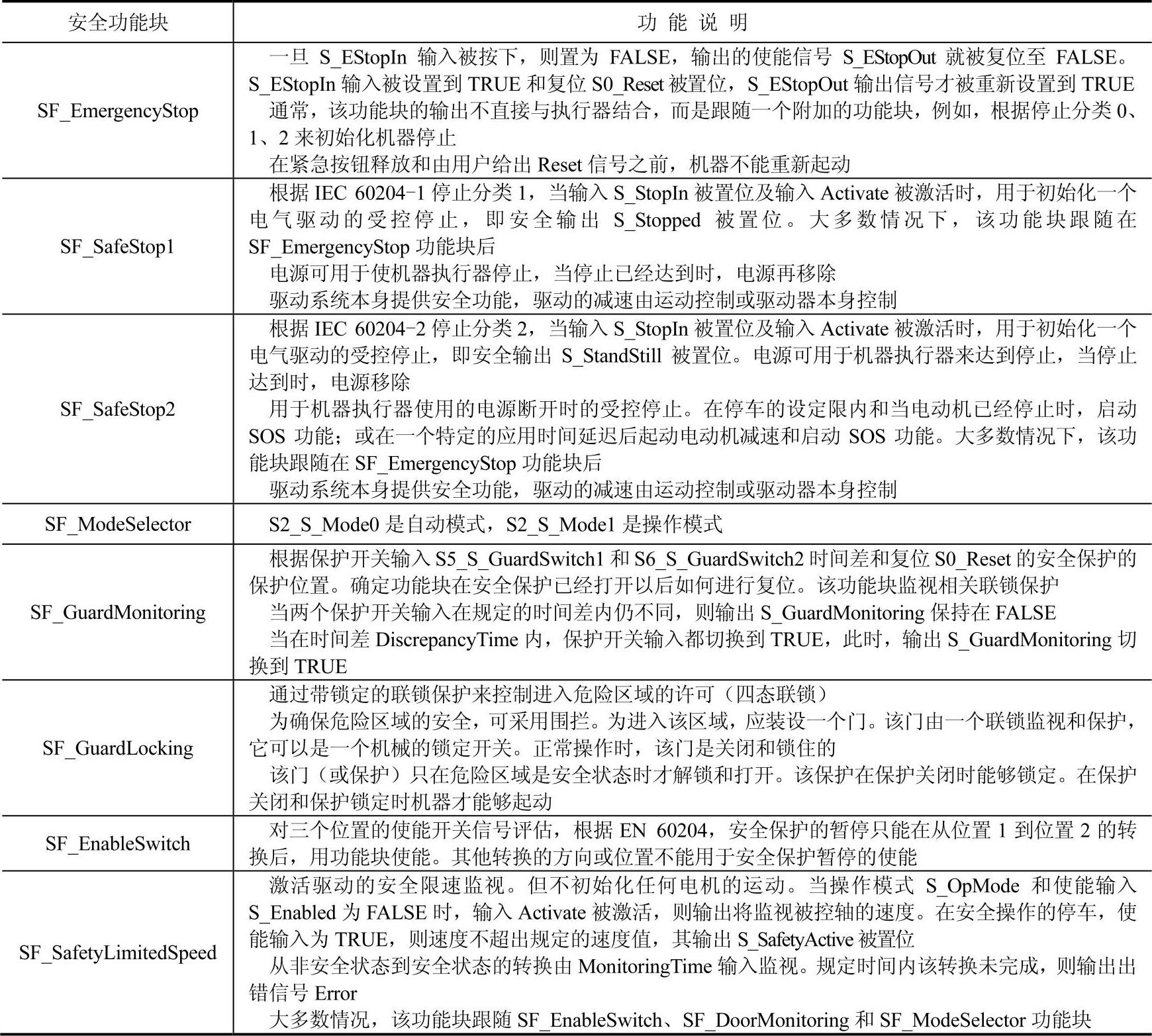
本程序中所用安全功能块的功能见表5-45。
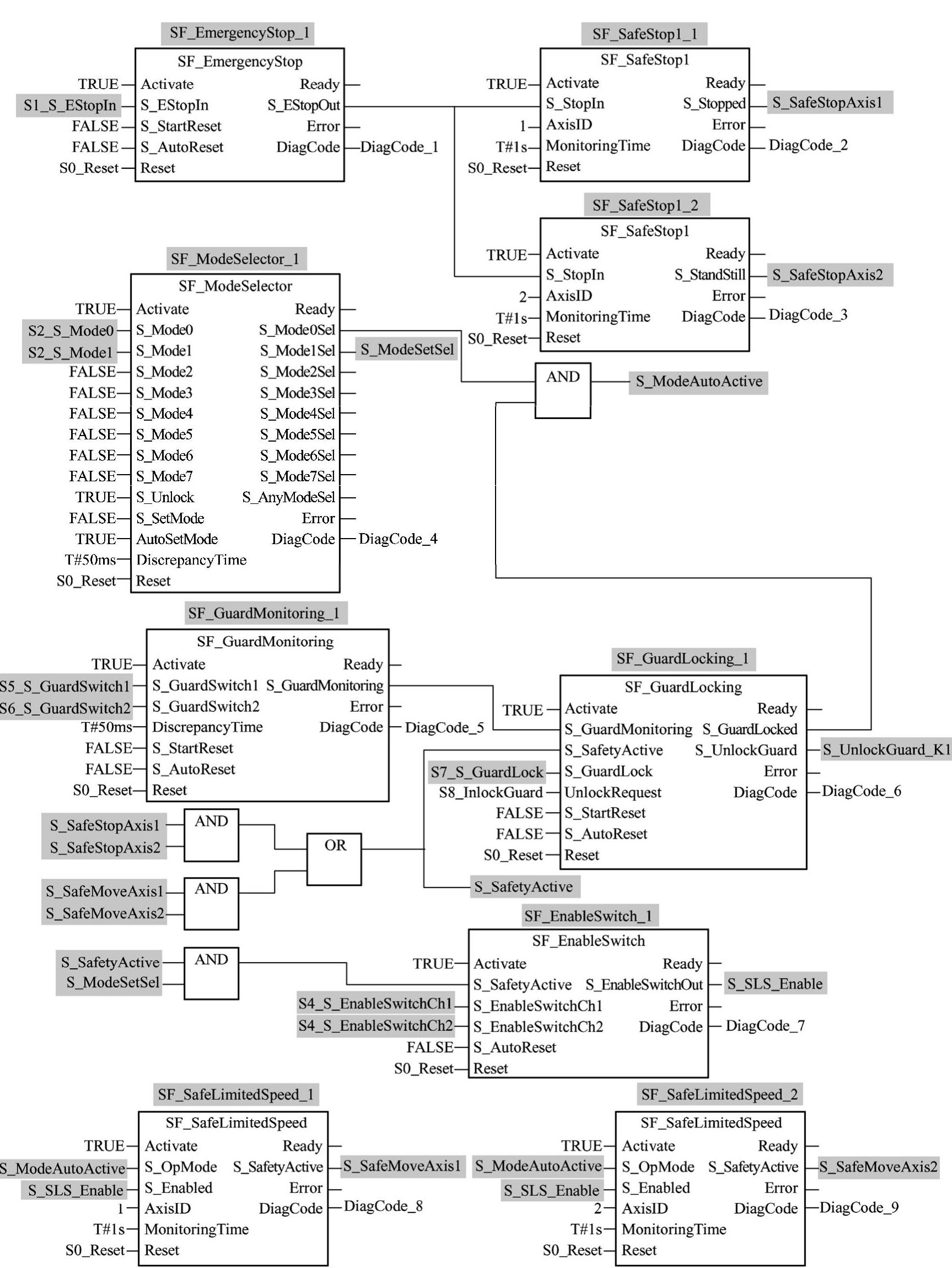
图5-43 隐含安全接口的安全紧急停车系统的FBD程序
表5-45 本程序有关的安全功能块的功能
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。