



【摘要】:在光电纠偏控制系统中,PLC为核心,包括左右的光电开关与限位开关、手动/自动选择和手动按钮、步进电动机驱动器和步进电动机。如图7-52所示为光电纠偏PLC控制系统的电气接线。表7-7 HB-4020M的接线端子功能说明由图7-52获得光电纠偏PLC系统的I/O资源分配见表7-8。
在光电纠偏控制系统中,PLC为核心,包括左右的光电开关与限位开关、手动/自动选择和手动按钮、步进电动机驱动器和步进电动机。如图7-51所示为光电纠偏控制系统的PLC工作示意。
一般的工艺技术指标要求如下:
1)跟踪标志宽度大于2mm;
2)光电检测开关与物料的距离为12mm±2mm;
3)响应时间为15ms;
4)灵敏度为±0.2mm;
5)驱动器速度:0~10mm/s;
6)推动力:50~500kgf(由电动机的输出功率决定);
7)位置失控保护;
8)光电开关输出方式:NPN常开型。
如图7-52所示为光电纠偏PLC控制系统的电气接线。为了确保PLC输出电平(24V)与步进电动机的驱动电平相一致,需要串接2kΩ电阻。
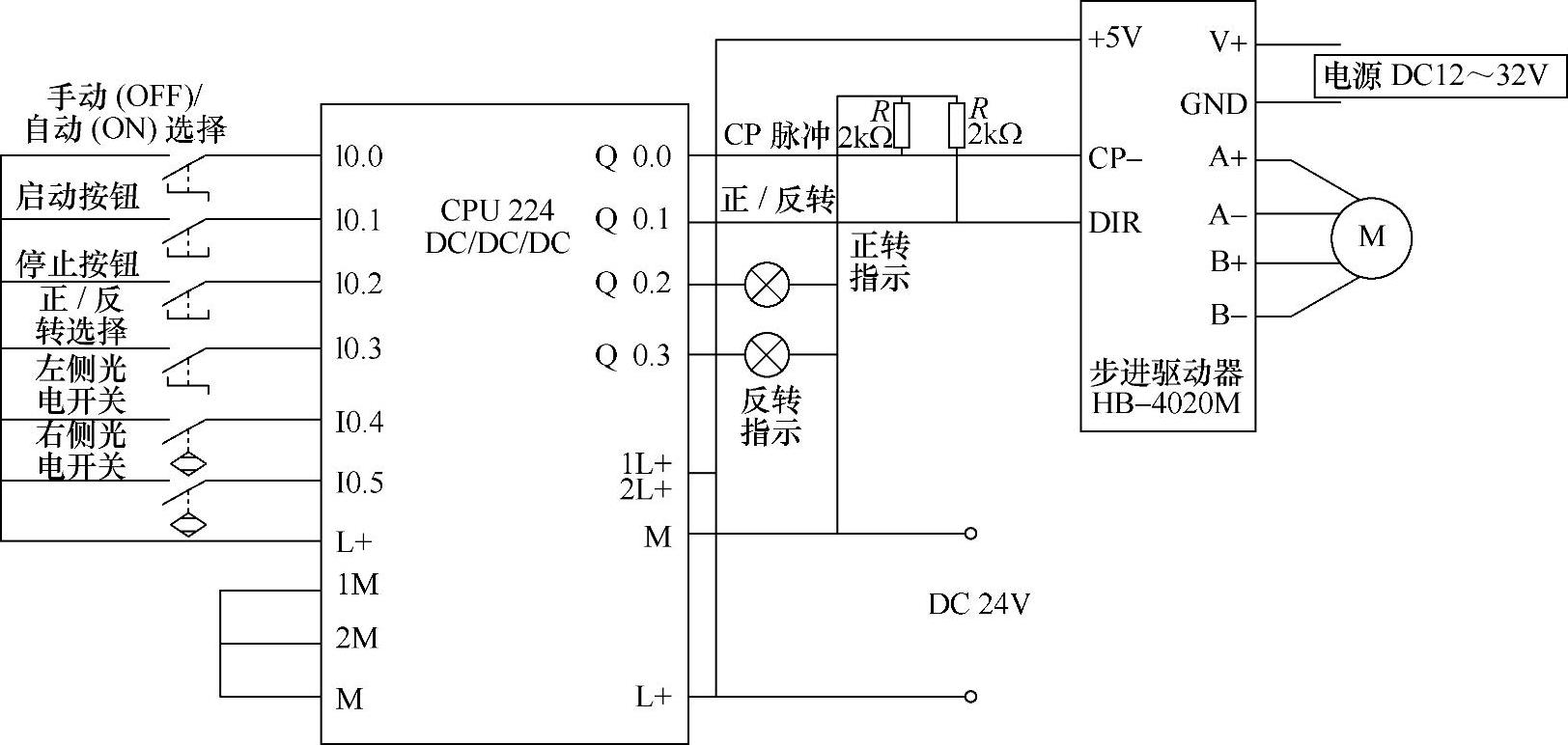
图7-52 光电纠偏PLC控制系统的电气接线(https://www.xing528.com)
在这里对HB-4020M细分型步进电动机驱动器进行简单介绍:其驱动电压为DC12~32V,适配4、6或8出线、电流在2.0A以下、外径39~57MM型号的二相混合式步进电动机,可运用在对细分精度有一定要求的设备上。图7-53所示为HB-4020M的外观。

图7-53 HB-4020M的外观
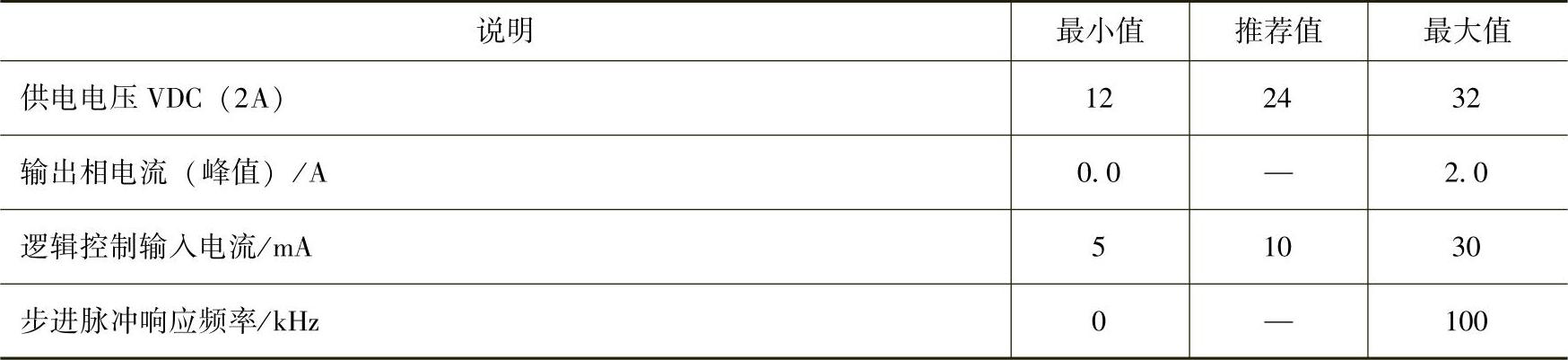
HB-4020M的电气规格见表7-6。
表7-6 HB-4020的电气规格
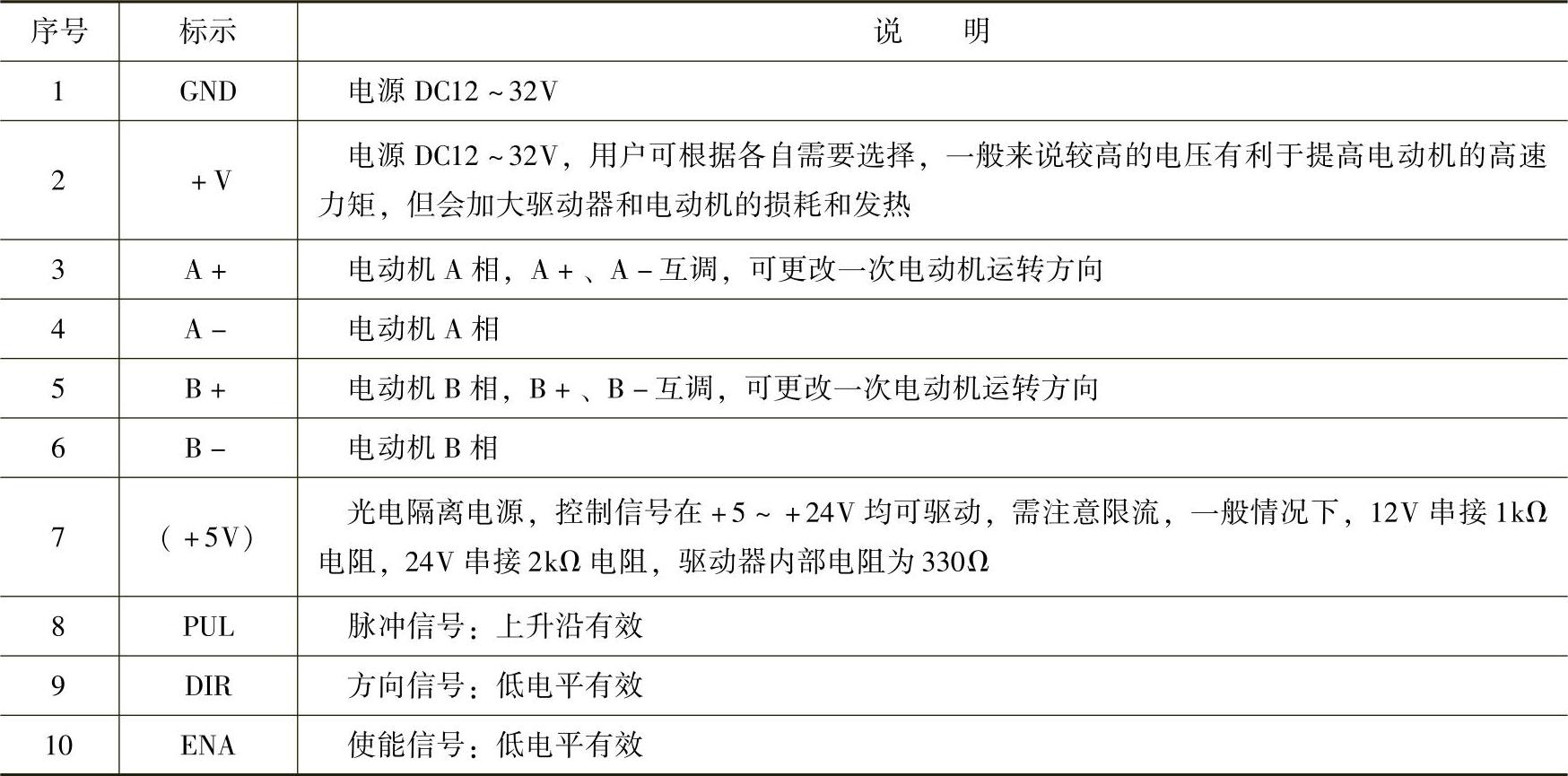
HB-4020M的接线端子功能说明见表7-7。
表7-7 HB-4020M的接线端子功能说明
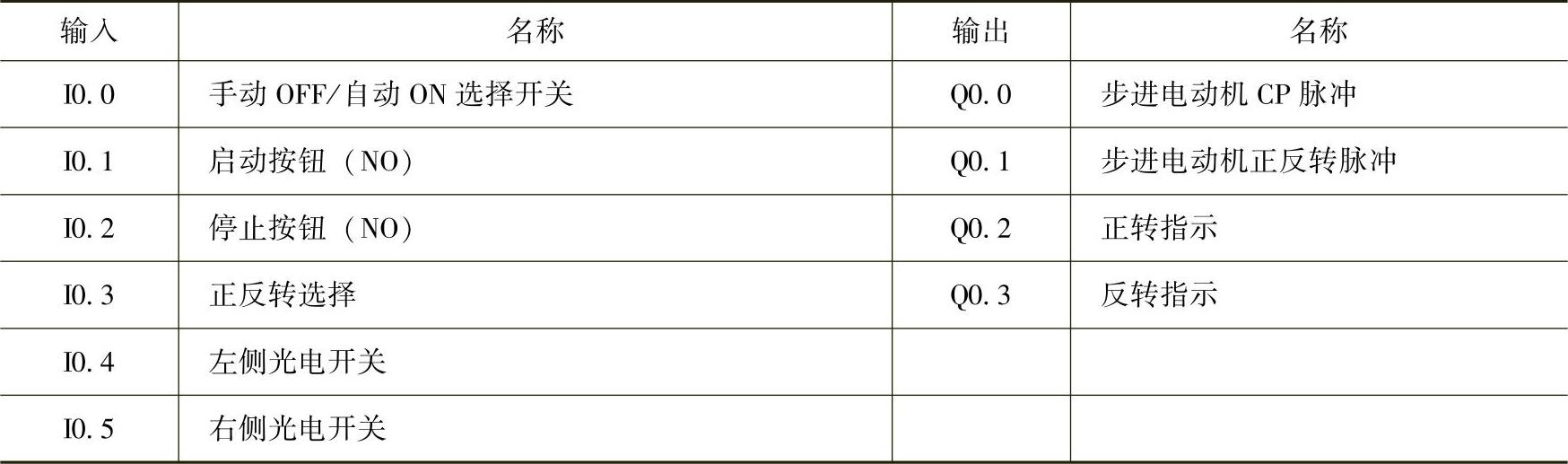
由图7-52获得光电纠偏PLC系统的I/O资源分配见表7-8。
表7-8 I/O资源分配
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。