



(1)PTO/PWM功能的控制字
SMB66~SMB85被用于监控和控制PLC(脉冲)指令的脉冲链输出和脉冲宽度调制功能。PTO/PWM功能的控制字见表7-3。
表7-3 PTO/PWM功能的控制字

(续)

PTO/PWM发生器和过程映像寄存器共用Q0.0和Q0.1。PTO或PWM功能在Q0.0或Q0.1位置现用时,PTO/PWM发生器控制输出,并禁止输出点的正常使用。输出信号波形不受过程映像寄存器状态、点强迫数值、执行立即输出指令的影响。PTO/PWM发生器非现用时,输出控制转交给过程映像寄存器。过程映像寄存器决定输出信号波形的初始和最终状态,使信号波形在高位或低位开始和结束。
(2)PLS指令
如图7-32所示的脉冲输出(PLS)指令被用于控制在高速输入(Q0.0和Q0.1)中提供的“脉冲串输出”(PTO)和“脉宽调制”(PWM)功能。PTO提供方波(50%占空比)输出,配备周期和脉冲数用户控制功能。PWM提供连续性变量占空比输出,配备周期和脉宽用户控制功能。
PWM操作
PWM功能提供带变量占空比的固定周期输出,PWM操作如图7-33所示。可以微秒或毫秒为时间基准指定周期和脉宽。其中,周期的范围从10~65,535μs,或从2~65,535ms;脉宽时间范围从0~65,535μs或从0~65,535ms。

图7-32 PLS指令
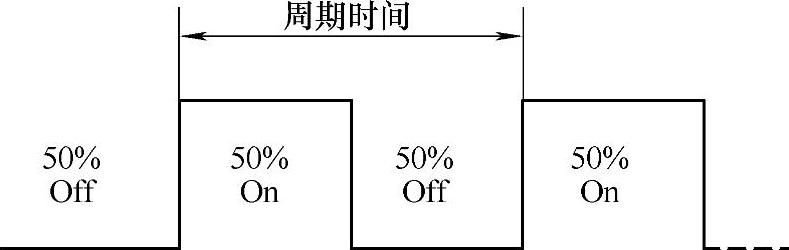
图7-33 PWM操作
设置脉宽等于周期(这使占空比为100%)使输出连续运行;设置脉宽等于0(这使占空比为0)会关闭输出。
有两种不同的方法可改变PWM信号波形的特征:同步更新和异步更新。
1)同步更新:如果不要求更改,即可以执行同步更新。执行同步更新时,信号波形特征的变化发生在循环边缘,提供顺利转换。
2)异步更新:此为常见的PWM操作,脉宽不同,但周期保持不变。因此,不要求改变。但是,如果要求改变PTO/PWM发生器,则应使用异步更新。异步更新使PTO/PWM发生器被立即禁用,与PWM信号波形异步。这样可能造成控制设备状态暂时不稳。由于此原因,建议使用同步PWM更新。选择可用于所有预计周期数值的。
控制字节中的PWM更新方法位(SM67.4或SM77.4)指定更新类型,在执行PLC指令时激活改动。请注意,如果改变,则会发生异步更新,无论PWM更新方法位的状态如何。
PTO操作
PTO为指定的脉冲数和指定的周期提供方波(50%占空比)输出。PTO可提供单脉冲串或多脉冲串(使用脉冲轮廓)。您指定脉冲数和周期(以微秒或毫秒递增)。(https://www.xing528.com)
周期范围从10~65,535μs或从2~65,535ms。
脉冲计数范围从1~4,294,967,295次脉冲。
为周期指定基数微秒或毫秒(例如75ms)会引起占空比的失真。
状态字节(SM66.7或SM76.7)中的PTO空闲位表示编程脉冲串已完成。另外,也可在脉冲串完成时激活中断例行程序。如果使用多段操作,则在轮廓表完成时立即激活中断例行程序。PTO功能允许脉冲串链接或管线作业。现用脉冲串完成时,新的脉冲串输出立即开始。这样就保证了随后的输出脉冲串的连续性。
(3)PTO包络图计算
对于PTO输出的多段管线,可以参考表7-4所示的多段PTO包络表格式。
表7-4 多段PTO包络表格式

图7-34所示的实例给出的PTO包络表值要求产生一个输出波形,该波形包括三段:步进电动机加速(第一段)、步进电动机匀速(第二段)、步进电动机减速(第三段)。
对于该例,假定需要4000个脉冲达到要求的电动机转动数,启动和结束频率是2kHz,最大脉冲频率是10kHz。由于包络表中的值是用周期表示的,而不是用频率,需要把给定的频率值转换成周期值。所以,启动和结束的脉冲周期为500μs,最高频率的对应周期是100μs,在输出包络的加速部分,要求在200个脉冲左右达到最大脉冲频率。对于包络的减速部分,也在400个脉冲内完成。
在该例中,使用一个简单公式计算PTO/PWM发生器用来调整每个脉冲周期所使用的周期增量值:
给定段的周期增量=ECT-ICT/Q式中ECT——该段结束周期时间;
ICT——该段初始化周期时间;
Q——该段的脉冲数量。

图7-34 步进电动机控制时序
利用该公式可以得出:加速部分(第一段)的周期增量是-2;匀速部分(第二段)的周期增量是0;减速部分(第三段)的周期增量是1。假定包络表存放在从VB500开始的V存储区中,产生所要求波形的值见表7-5。
表7-5 产生所要求波形的值

当然,对于同一段的周期计算和持续时间还可以采用叠代等方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。