



(1)左/右螺旋机构
如图8-25所示,左右夹头1和2既是定位件,又是夹紧件。通过左(L)/右(R)螺旋机构,使左右夹头作同步开合运动,从而将工件3作定心夹紧。
自定心夹紧机构的夹头通常是对称配置的,但其形状是随工件的形状而变的。图8-26展示出几种典型工件的定心夹紧的形式。其中,图8-26a所示为内圆面定位工件;图8-26b所示为外圆面定位工件;图8-26c所示为内方孔定位工件;图8-26d所示为各种直面形外壁定位工件。

图8-25 左/右螺旋机构
1—左夹头 2—右夹头 3—工件
L—左螺纹 R—右螺纹
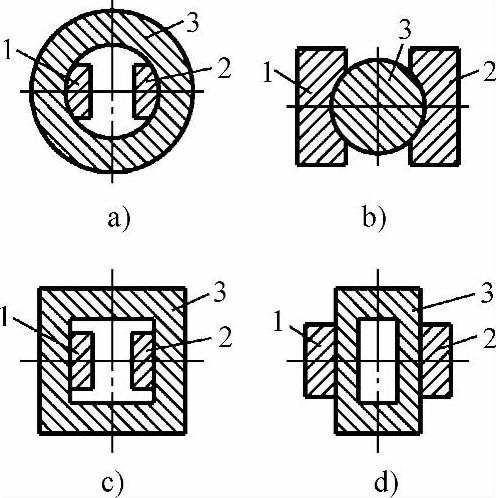
图8-26 自定心夹紧形式
1—左夹头 2—右夹头 3—工件
(2)斜楔移动夹紧机构
斜楔机构由楔块和与之配合的滑动件或摆动件组成。其中的滑动件或摆动件既是定位件又是夹紧件。利用楔块斜面的移动对这些运动构件产生压力并将工件夹紧。
斜楔移动夹紧机构若采用气动或液压作为动力源,可以很容易实现定位夹紧的自动化。
斜楔移动夹紧机构有如图8-27和图8-28所示的基本结构类型。其中,图8-27所示是楔块和移动滑块组合的结构,图8-28所示是楔块和摆动杠杆组合的结构。

图8-27 斜楔式自定心夹紧机构
斜楔夹紧机构的夹紧力由图8-29所示的关系计算如下

式中 P——滑块对工件的夹紧力;
Q——动力源对楔块的作用力;
α——斜楔的升角;
φ1——斜块对滑柱的摩擦角;
φ2——滑柱对导向孔的摩擦角。
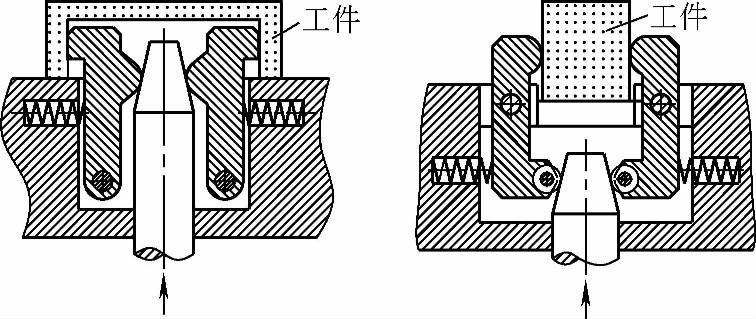
图8-28 斜楔/摆杆式自定心夹紧机构

图8-29 斜楔夹紧受力图
自锁条件为
α<φ1+φ2(https://www.xing528.com)
一般钢件接触的摩擦因数为μ=0.1~0.15,所以得
φ1=φ2=arctan(0.1~0.15)=5°43′~8°30′
故斜楔的升角为α=11°~17°。
为保证夹紧后的自锁性能,对斜楔的升角的取值是:
1)对手动操作,一般取α=6°~8°。
2)对气动或液压操作,若不考虑自锁时,可取α=15°~30°。
此种夹紧机构的增力比为

当不考虑摩擦力时,理想增力比为

(3)钢球式快速连接压紧机构
连接具有相同孔径的若干个结构件时,通常采用传统的螺栓螺母紧固件联接法。但是在有些场合,此法是不方便的,甚至操作过程繁琐巨难以实现。例如有些工作空间不宜使用紧固件操作工具,或有些场合要求快速简便完成连接工作,这就需要有一种特殊的连接方法。
一种新型的钢球锁紧机构可以有效地应用于上述的连接工作。这种锁紧机构,具有快速定位和夹紧的功能,其结构特点主要是有带钢球的锁体,其结构形式有内螺纹和外螺纹两种。
图8-30所示是内螺纹锁紧式结构。它由如下构件和元件组成:带旋把的螺旋心轴1、带内螺纹的锁体2、O形圈3(两件)和钢球4(4~6个,视结构大小而定)。锁体开有4~6个孔,与钢球滑动配合。钢球数与锁体的孔数相同。螺旋心轴的下端为阶梯轴,其大径为D,小径为d。a、b表示被夹紧的同孔径的两板件,两板件厚度之和为t。滚压封边处理的目的是防止旋把拧松时脱出。
锁体外圆开有两条环形槽与O形圈相配合。O形圈的作用是防止锁体在旋紧时转动,下端的O形圈还起防止钢球脱出的作用。
锁紧原理:旋动螺旋心轴向下运动时,锁体带动钢球向上移动;当钢球滑动到心轴的大径D的位置时,就会向锁体外伸出,并随之压向构件b,直至把a、b两板件一并压紧为止。
解锁原理:反旋螺旋心轴,心轴向上移动,而锁体带动钢球反向移动,离开构件b,当钢球处于心轴的小径d位置时,锁体即可连同钢球等一起拔出。
图8-31所示是外螺纹锁紧式结构。它的主要特点是:锁体3有外螺纹,直接用螺母2拧紧;有效夹紧厚度t范围大。其使用步骤如下:
1)图8-31a所示是未锁紧的自由状态。这时,带偏心压头的手把1提起在垂直位置,心轴4在弹簧5的作用下向下推进,钢球6处在心轴的小径部位,不超出锁体外径。于是可以将锁体插入需夹紧工件的孔内。

图8-30 内螺纹锁紧式结构
1—螺旋心轴 2—锁体 3—O形圈 4—钢球

图8-31 外螺纹锁紧式结构
1—手把 2—螺母 3—锁体 4—心轴 5—弹簧 6—钢球
2)图8-31b所示是锁紧状态。这时,将手把1扳向平直位置,利用偏心量h将心轴向上提起,由心轴的大径部位把钢球向外推压,使其超出锁体外径。于是可以用螺母进行锁紧。通常,若使用φ6~φ8mm的钢球,须凸出锁体外径约1.5~2mm。
这种连接锁销在连接过程中,不存在一般连接方式的螺钉螺母,也无需任何操作工具,只需将锁体插进被连接构件的孔内拧紧即可。解锁时,只需反向拧松旋把或拧松螺母并提起手把,即可拔出锁体,使用很方便。
使用这种连接锁销应注意的是:当以单销连接,被连接的两块板有相对转动时,钢球会产生滑动,但不松脱。所以,这时机构只起定位压紧作用,而不起绝对夹紧的作用。若采用双锁销定位夹紧,效果就很好。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。