



【摘要】:单盘式这种机构如图8-22所示。用作用力F扳动操作杆,使摩擦盘2向摩擦盘1施加足够的轴向压力P,以实现对摩擦盘1的制动。制动力矩为式中 M——摩擦盘2对摩擦盘1的制动力矩;μ——摩擦因数;D——两摩擦盘压合面的外径;d——两摩擦盘压合面的内径。多盘式这种机构采用多摩擦盘,可增加摩擦结合面,提高制动转矩。锥面摩擦制动实际上是利用楔面摩擦原理,实现以较小的轴向压紧力,获得较大的制动力矩。
(1)单盘式
这种机构如图8-22所示。它主要由随转轴转动的摩擦盘1和只作轴向移动不作转动的摩擦盘2组成。用作用力F扳动操作杆,使摩擦盘2向摩擦盘1施加足够的轴向压力P,以实现对摩擦盘1的制动。
制动力矩为
式中 M——摩擦盘2对摩擦盘1的制动力矩;
μ——摩擦因数;
D——两摩擦盘压合面的外径;
d——两摩擦盘压合面的内径。
这种机构的优点是压合平稳,缺点是需要较大的轴向压力。
(2)多盘式
这种机构采用多摩擦盘,可增加摩擦结合面,提高制动转矩。机构简图如图8-23所示,它由嵌于转轴1的内摩擦片2和嵌于固定壳体3的外摩擦片4组成。内、外摩擦片各制有两个或四个均布的凸肩,分别与转轴和壳体的键槽作轴向滑动配合。
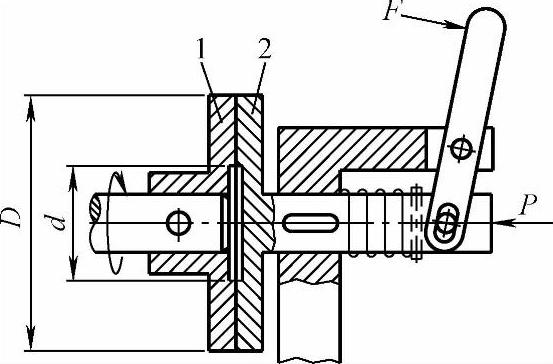
图8-22 单盘式制动机构
1、2—摩擦盘
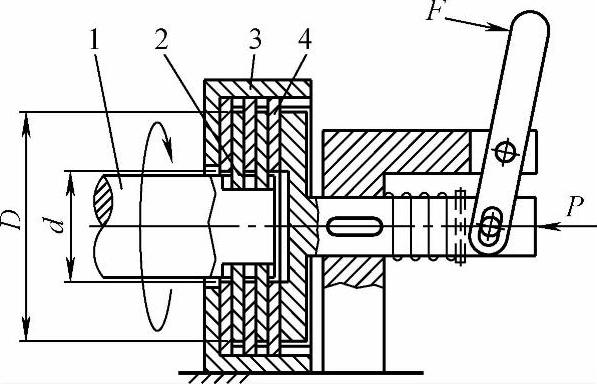
图8-23 多盘式制动机构(https://www.xing528.com)
1—转轴 2—内摩擦片 3—壳 体4—外摩擦片
当机构有k个摩擦结合面时,制动转矩M为
式中 k——摩擦结合面数目(如图8-23所示机构,k=4);
D、d——摩擦压合面的外径和内径。
(3)锥盘式
如图8-24所示,锥盘1随转轴转动,锥盘2只作轴向移动而不转动。锥面摩擦制动实际上是利用楔面摩擦原理,实现以较小的轴向压紧力,获得较大的制动力矩。
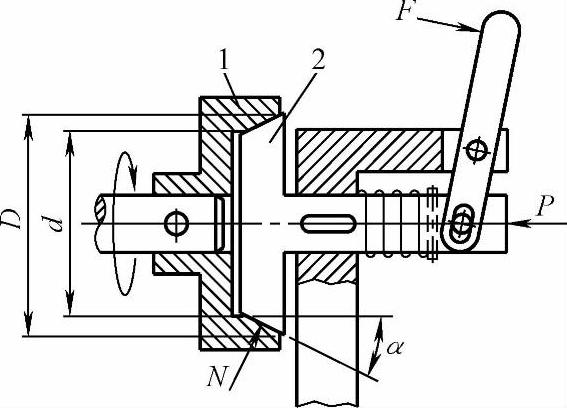
图8-24 锥盘式制动机构
在轴向压紧力P的作用下,结合面的正向反力N为
N=P/(sjnα+μcosα)
制动转矩M为

式中 α——为摩擦锥的半锥角;
D、d——分别为锥盘摩擦压合面的大径和小径。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。