



【摘要】:当连杆2处于水平位置时,两力臂的合抱将达到最小的极限夹紧距离。构件4是两个对称机构的共用机架,构件1和3是连架杆。图8-8 摇杆-滑块式夹持机构1—导杆 2—连杆 3—力臂图8-9 平行四边形式夹持机构1、3—连架杆 2—连杆 4—机架 5—气缸由机构学可知,这是平行四边形双曲柄机构,当任一连架杆1或3作主动运动时,其连杆2必作平移运动。图8-9b所示的机架4固定不动,用气缸5直接驱动两连架杆摆动。
(1)摇杆-滑块式夹持机构
图8-8所示是利用摇杆滑块机构原理制作的夹持机构。这里以滑块(导杆1)为主动构件。用气缸往复推动导杆1,带动连杆2,使力臂3摆动,即可实现对工件的夹紧传递和松脱卸料。当连杆2处于水平位置时,两力臂的合抱将达到最小的极限夹紧距离。此时,表明夹紧不可靠,或有松开工件的现象。所以,设计时要注意被夹工件的尺寸和连杆2在合抱极限位置的状况。
(2)平行四边形式夹持机构
图8-9所示的两种机构,是利用平行四边形连杆机构运动原理设计的夹持机构。这种机构由两个对称的平行四边形机构组成。构件4是两个对称机构的共用机架,构件1和3是连架杆。构件2是连杆,其延伸端就是夹头。
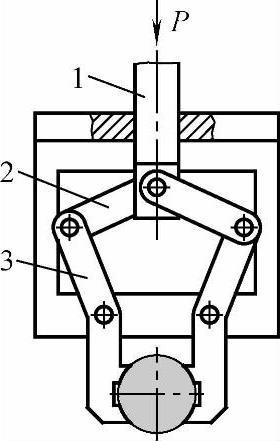
图8-8 摇杆-滑块式夹持机构
1—导杆 2—连杆 3—力臂(https://www.xing528.com)
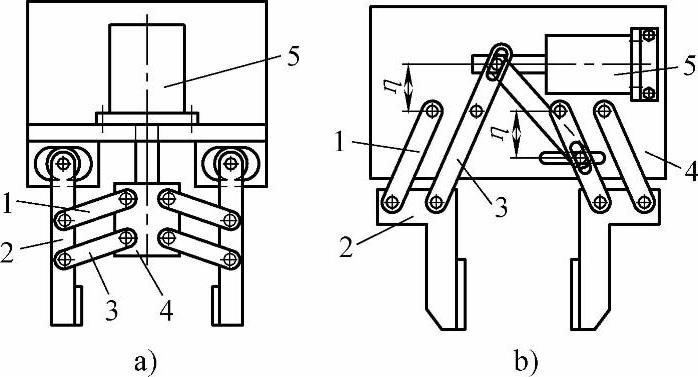
图8-9 平行四边形式夹持机构
1、3—连架杆 2—连杆 4—机架 5—气缸
由机构学可知,这是平行四边形双曲柄机构,当任一连架杆1或3作主动运动时,其连杆2必作平移运动。所以,这两种机构的共同特点是夹头作平移运动。
不同的是:图8-9a所示的机架4可以移动,用气缸5驱动机架作上下运动而带动两连杆摆动。图8-9b所示的机架4固定不动,用气缸5直接驱动两连架杆摆动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。