



【摘要】:如果使单级行星轮系的系杆固定不动,使行星轮的轴线不能周转,而太阳轮可以转动,则这种行星轮系变成如图7-21a所示的普通定轴轮系。若该轮系的齿轮3和4的齿数相等,齿轮1和2的齿数不等,则可变为图7-21b所示的定轴差动齿轮机构,即定轴差动轮系间歇转位机构。因此,齿轮1对齿轮2的相对转数差Δn12为同理,齿轮2对齿轮1的相对转数差Δn21为式中z1、z2——齿轮1和齿轮2的齿数。根据上述差动原理,可设计成定轴差动齿轮系计数器。
如果使单级行星轮系的系杆固定不动,使行星轮的轴线不能周转,而太阳轮可以转动,则这种行星轮系变成如图7-21a所示的普通定轴轮系。若该轮系的齿轮3和4的齿数相等,齿轮1和2的齿数不等,则可变为图7-21b所示的定轴差动齿轮机构,即定轴差动轮系间歇转位机构。
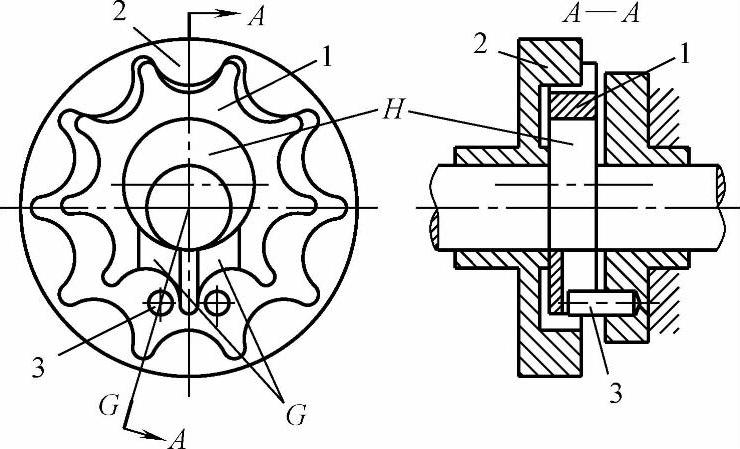
图7-20 行星摆轮计数机构
1—摆轮 2—数字轮 3—固定销
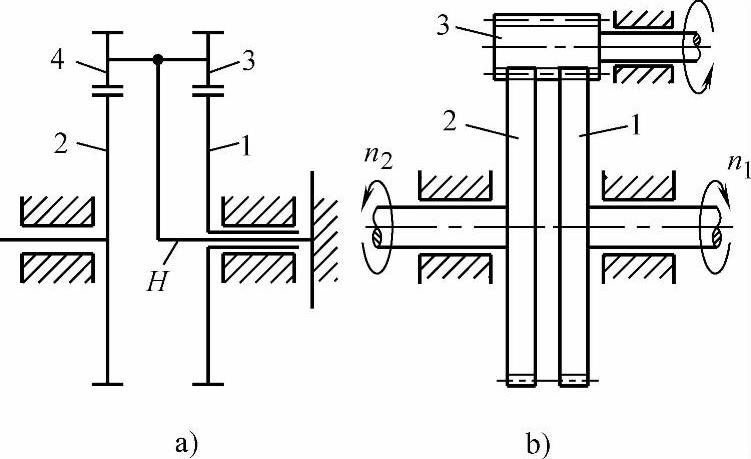
图7-21 普通定轴轮系和定轴差动齿轮机构
对图7-21b所示的轮系,当齿轮3作主动,则齿轮1和齿轮2在齿轮3的同时驱动下作相对的差动运动。若齿轮1转了n1转,则齿轮2转了n2=n1z1/z2转。因此,齿轮1对齿轮2的相对转数差Δn12为(https://www.xing528.com)

同理,齿轮2对齿轮1的相对转数差Δn21为

式中z1、z2——齿轮1和齿轮2的齿数。
根据上述差动原理,可设计成定轴差动齿轮系计数器。相对转数差Δn12或Δn21就是齿轮1(或齿轮2)向齿轮2(或齿轮1)的进位数。当Δn12或Δn21为“+”(z2-z1>0或z1-z2>0)时,表示进位读数的递增方向与累计读数的递增方向一致;当Δn12或Δn21为“-”时,则相反。
注意,因同时与齿轮3啮合的齿轮1和2的齿数不等,而中心距相同,所以其中一啮合副须进行修正或作适当的调整才能正常传动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。