



【摘要】:图7-19a所示是少齿差行星轮系机构的原理图。图7-19b所示是由少齿差行星轮系演变而来的行星摆轮间歇运动机构。图7-19所示的少齿差行星轮系机构由行星齿轮1、太阳轮2和系杆H组成。当z2-z1=1时,iH1=-z1,即当系杆H转z1转时,行星齿轮行星齿轮自转一周,这就是典型的一齿差行星轮系机构的运动特性。当系杆H转动时,通过行星轮作周期的摆动而使太阳轮作间歇转动。
图7-19a所示是少齿差行星轮系机构的原理图。图7-19b所示是由少齿差行星轮系演变而来的行星摆轮间歇运动机构。
图7-19所示的少齿差行星轮系机构由行星齿轮1、太阳轮2和系杆H组成。系杆H对行星轮1的传动比可按相对速度原理求得。由机械原理可知,把这种机构转化为定轴轮系后,其传动比为
因太阳轮固定不动,即n2=0,所以上式变为
或 
于是,系杆H对行星齿轮1的传动比iH1为

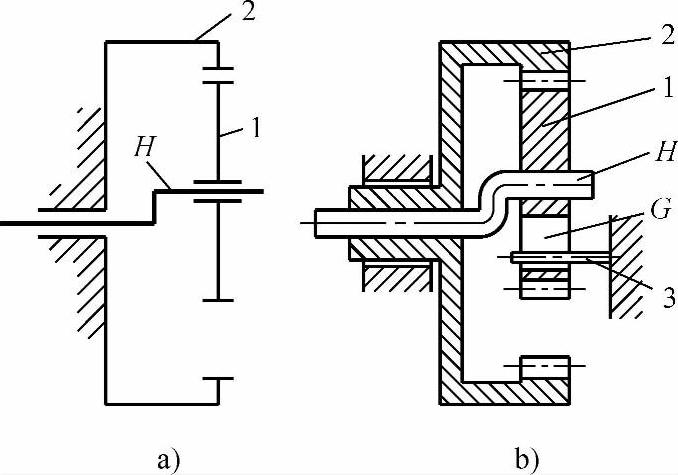
图7-19 少齿差行星摆轮间歇转位机构
1—行星轮 2—太阳轮 3—销子(https://www.xing528.com)
一般,z2-z1<3。当z2-z1=1时,iH1=-z1,即当系杆H转z1转时,行星齿轮行星齿轮自转一周,这就是典型的一齿差行星轮系机构的运动特性。
若把图7-19a所示的轮系演变为图7-19b所示的少齿差行星摆轮机构,则太阳轮2可以转动,行星轮1开有槽G,并用固定的销子3限制其只能作摆动而不能转动,所以称这种行星齿轮为行星摆轮。
当系杆H转动时,通过行星轮作周期的摆动而使太阳轮作间歇转动。因行星轮只作摆动而不转动,即n1=0,所以系杆H对太阳轮2的传动比iH2为

同理,当z2-z1=1时,iH2=z2,即当系杆H转z2转时,太阳轮转一周。
按上述原理可设计成如图7-20所示的计数机构。它由偏心轴H(即系杆)、摆轮1和数字轮2组成。摆轮开有两条凹槽G,利用两个固定销3在其中限位。这样,在偏心轴的驱动下,通过摆轮的摆动可使数字轮转动。
设摆轮1和数字轮2的齿数分别为9和10,于是传动比为

这就是说,当系杆转一周时,数字轮转过1/10转,进位了一个数字。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。