



图6-25所示是最基本的正切机构。摆杆1槽内的可移动滑块2与顶杆3铰连。摆杆绕O点摆动α角,顶杆的位移y按正切规律变化。即
y=ltanα
若输入角从OY轴起算,则为余切机构。
这种机构的缺点是滑动摩擦大,巨在大角度变化时会引起正切值的迅速增大而使机构难以调节。所以一般限于在30°~45°范围内工作。
图6-21所示的正弦尺调节机构很容易改为正切机构。只要把销子2固定在滑尺3上,而在旋钮上开槽,即可使滑尺的位移量x按正切规律变化。
图6-26所示是类似于正切机构的正割机构,其输出位移量为
若转角α由OY轴起算,则按余割机构规律变化,其输出位移量为
图6-27所示是能同时实现正切和正割组合运算的三角函数机构。其输出位移量为

由上式可知,当e=0时,则为图6-25所示的正切机构;当l=0时,则为图6-26所示的正割机构。
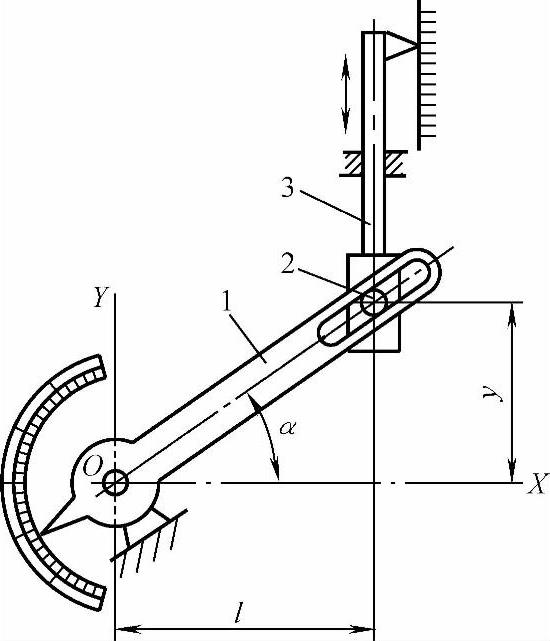
图6-25 正切机构
1—摆杆 2—可移动滑块 3—顶杆(https://www.xing528.com)
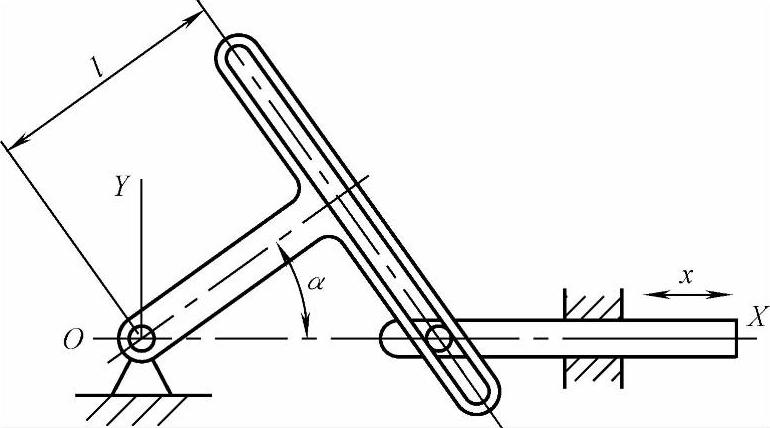
图6-26 正割机构
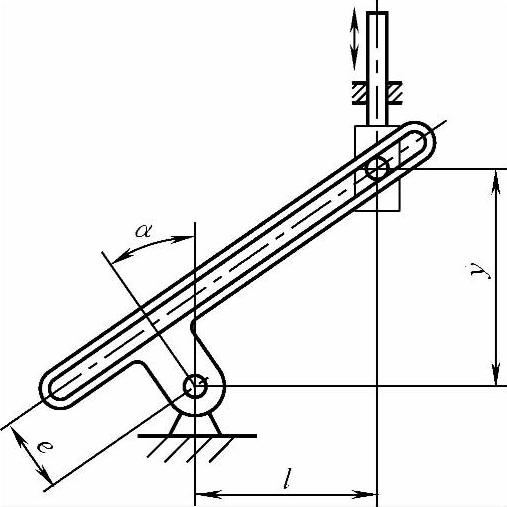
图6-27 正切和正割组合机构

图6-28 具有两个输入变量的正切机构
1—轴 2—螺杆 3—移动架 4—带齿条的滑块 5—圆盘 6—长齿轮 7—蜗杆 8—滑块 9—销子
以上的三角函数机构均只含有一个变量α,结构比较简单。图6-28所示是具有两个输入变量的较复杂的正切机构。圆盘5兼作蜗轮,在蜗杆7的传动下绕固定轴心O转动。圆盘开有一个导槽,滑块8可在槽内滑动。带齿条的滑块4可在移动架3的槽内滑动。滑块4和滑块8通过销子9铰连于A。圆盘水平中心线与移动架的中心线垂直相交于B。于是直角三角形OAB的两直角边OB和AB的长度可改变。
蜗杆驱动圆盘的转角α为输入转角量;轴1及两对锥齿轮副驱动两螺杆2,使移动架对圆盘中心产生的位移量x为输入线性量。两个输入量的合成结果使A、B两点的位置改变,于是有与之相应的输出位移量y。由三角形可得它们的关系为
y=xtanα
机构也可用滑块4的齿条与长齿轮6的啮合传动,把输出位移量y变为输出回转量αy。
这种机构也可看成是乘法机构。其输出就是位移变量与转角的正切之乘积。
应注意的是,转角α只能在0°~50°范围内变化,因为转角过大将使正切值急剧增大,以致机构卡死。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。