



杠杆式乘法机构是基于相似三角形原理。图6-10所示机构由杠杆1、2和3及两个滑块组成。根据相似三角形关系,有
式中,k=l1/l2是比例系数,为不变因子。y是输入量,为可变因子。可见,这种机构可实现常量与变量相乘的运算。
为防止机构发生卡死,杠杆1对O-x轴的夹角应在45°范围内。
如果把图6-10所示机构的距离l1设计为可变量,则有如图6-11所示的两个变量相乘的杠杆式乘法机构。这时杠杆2的位置x可用螺杆4来改变。同样按相似三角形原理得两输入变量x和y与输出量z的关系为
式中,l是杠杆1的摆动中心至杠杆3轴线的距离,称之为结构常数。
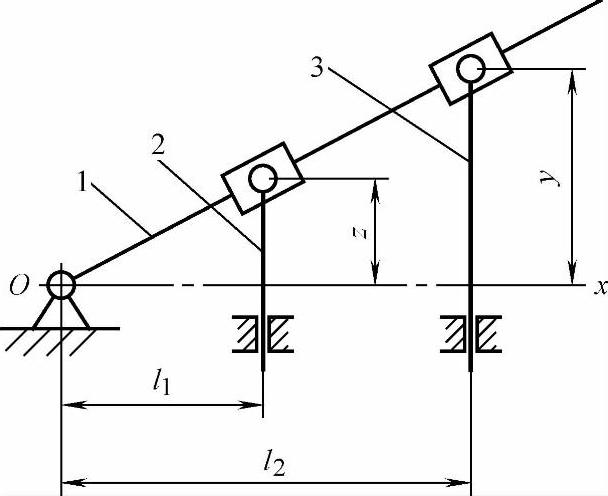
图6-10 常量与变量相乘的杠杆式乘法机构

图6-11 两个变量相乘的杠杆式乘法机构
1、2、3—杠杆 4—螺杆
图6-12所示机构是图6-11所示机构的另一种形式,称为槽架式杠杆乘法机构。图6-12a为其结构图,其特点是三个槽板相交于动销B,两对锥齿轮2和两根螺杆3把回转运动变为槽板6沿x方向的移动,这是输入变量x。绕固定点C摆动的槽板5与齿条4铰连于A,齿轮1和齿条4的驱动,使点A沿y方向移动,这是输入变量y。槽板7在动销B的带动下作y向移动,这就是输出量z(或是通过槽板7上的齿条传给齿轮8以转角形式输出)。
由位移量x、y和z所构成的两个相似直角三角形,根据上述关系式有如下三种特殊情况:
1)若动销B与固定销C重合,而槽板6固定不动(x=0)(见图6-12b),则不管槽板5如何运动,槽板7均不会移动(z=0)。
2)若动销B与固定销C重合,而槽板5固定不动(y=0)(见图6-12c),则不管槽板6如何运动,槽板7也不会移动(z=0)。

图6-12 槽架式杠杆乘法机构
a)结构图 b)、c)、d)输出量为零的三种情况(https://www.xing528.com)
1、8—齿轮 2—锥齿轮 3—螺杆 4—齿条 5、6、7—槽板
3)只要槽板5的槽孔轴线正好在零线(O-O位置),不管槽板6在何位置,槽板7也不会有输出(见图6-12d)。
从理论上讲,除法机构可用上述乘法机构的逆运动来实现,但实际应用中会受到一定的限制。因为如果作除法机构,分母趋近于零会使其商变得很大。这时只要有一个很小的输入变化量,就会引起一个很大的输出量,甚至远超出杠杆的变化范围。而巨输入转矩也很大,机构容易磨损和卡死。
但是,通过一定的方法可用一般的乘法机构来进行除法运算。比如,要实现z=x/y的除法运算,可把式子看成是z=(1/y)x。这就是求y的倒数与x乘积的问题。若1/y可求,则其积可用乘法机构运算。这称为倒数求商。
这种方法的关键是要设计一个倒数机构。图6-13所示是一个简单的倒数机构,它由两个滑块1和2以及两臂成90°角的槽板式杠杆3组成。
当滑块1输入量为y时,杠杆3绕O点摆动,使滑块2有相应的输出量R,R与y的倒数成比例。由相似直角三角形△OCA和△ODB可知

即 
所以 
因为l1和l2可看成是输入量y和输出量R,所以上式为
这就是倒数机构的运动公式。
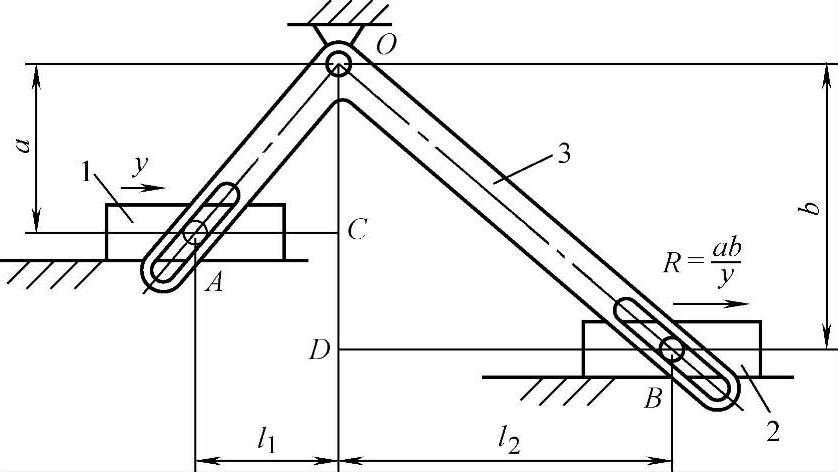
图6-13 倒数机构
1、2—滑块 3—槽板式杠杆
利用倒数机构与上述的乘法机构结合起来,便可成为一个求商的乘法机构。这时,倒数机构的输出量R就是乘法机构的输入量之一。其关系式为
z=Rx
式中 R——随输入变量y而改变的可变比例系数,R=ab/y。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。