



上述的齿条式、蜗杆蜗轮式和螺杆式差动机构,由于齿条、蜗杆和螺杆的长度是有限的,所以位移量也是有限的。若要实现在一个方向上作连续“无限长”的运动,可设想把两齿条弯成圆环形,于是就演变成如图6-6所示的平面齿轮式差动加法机构。
平面齿轮1和2绕十字轴3转动,假定它们的转速分别为n1和n2。齿轮4空套于十字轴的转臂,既作自转又作公转。于是十字轴的输出转速n3为
锥齿轮差动机构就是根据此原理设计的,它是典型的加法机构。锥齿轮式差动加法机构的结构图如图6-7所示,带输入齿轮的两中心锥齿轮1和2绕十字轴3转动,两个行星锥齿轮4对称布置,既绕十字轴的转臂自转,又绕中心锥齿轮周转。
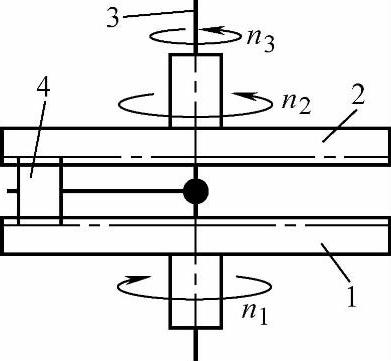
图6-6 平面齿轮式差动加法机构
1、2—平面齿轮 3—十字轴 4—齿轮
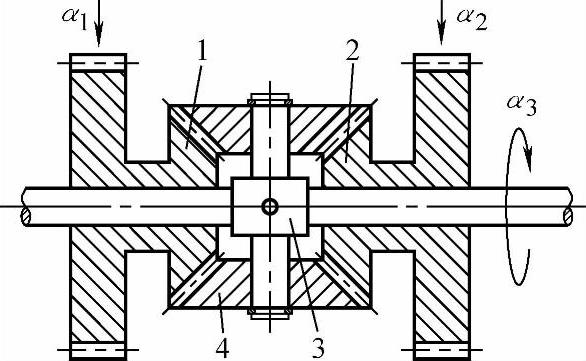
图6-7 锥齿轮式差动加法机构
1、2—中心锥齿轮 3—十字轴 4—行星锥齿轮
由以上分析可知,从锥齿轮1或2至十字轴的传动比为i13=i23=1/2。若锥齿轮1和2的输入转角分别为α1和α2,则十字轴的输出转角α3为
如果用十字轴和任一侧(锥齿轮1或2)作为输入量,则其代数和可由另一侧取得。即α1=2α3-α2或α2=2α3-α1。
由以上各式可知,差动机构具有三个未知数,只有给定了其中任意两个的值,另一个的值才可确定。也就是说,差动机构具有两个自由度,只有固定了两个构件,另一构件才不会运动。
锥齿轮差动加法机构的应用是广泛的。如在汽车、机床和其他机器中作为运动的差动或合成机构;在仪器中常用作测量和控制装置的误差敏感机构或位置自动调节机构。
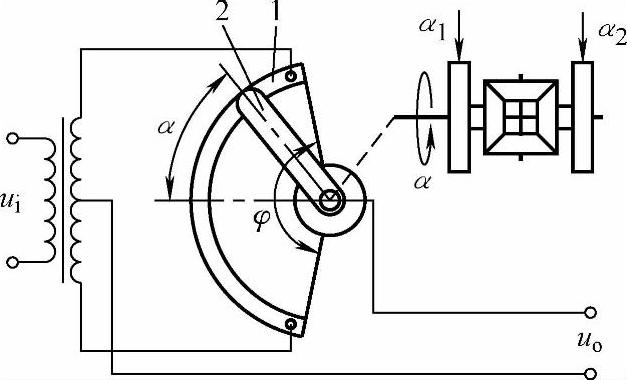
图6-8所示是锥齿轮差动加法机构在电位计式误差传感装置中的应用。
若电位计的滑动电阻器1的输出端连接的负载电阻大于本身电阻,则电位计的输出电压uo与滑块2的转角近似地成线性关系(误差一般不超过1%)。用公式表达为
式中 uo——电位计的输出电压;
uj——外加恒定电压;
φ——电阻器的总有效转角(可改变电阻值的最大范围);
α——滑块转角。
 (https://www.xing528.com)
(https://www.xing528.com)
图6-8 加法机构在电位计中的应用
1—滑动电阻器 2—滑块
滑块由差动机构的输出轴驱动,所以α角就是因为差动机构的输入转角α1和α2不同而产生的角误差。故上式可写成
当滑块在电阻器的中点时,输出电压uo=0,这时α1=α2,表示差动机构无转角差,输出轴不转动。只有α1≠α2,机构才有转角差,引起输出轴有相应的转动,从而带动电位计滑块转过一个角度α。把这转角α变换为输出电压uo,并通过适当的电路接通差动机构输入端的驱动装置(电动机),使输入转角α1或α2多转或少转、正转或反转一个相应的值,直至使之同步为止。
3.连杆式差动加法机构
图6-9所示是连杆式差动加法机构的应用。机构主要由导杆1、2、3和连杆4组成。x和y是膜盒传感器在压力差作用下引起的位移量。它们通过导杆1和2输入,两者的代数和为导杆3的输出位移量z。通过导杆3上的齿条带动齿轮和指针便可示出其量值。
假定导杆1、2对导杆3的距离分别为l1和l2,两导杆上下位移量分别为x和y。在导杆位移的作用下,连杆4的轴线从O-O位置移动到O′-O′位置。于是导杆3的位移量z可由图6-9a所示的几何关系得
所以 
当l1=l2时
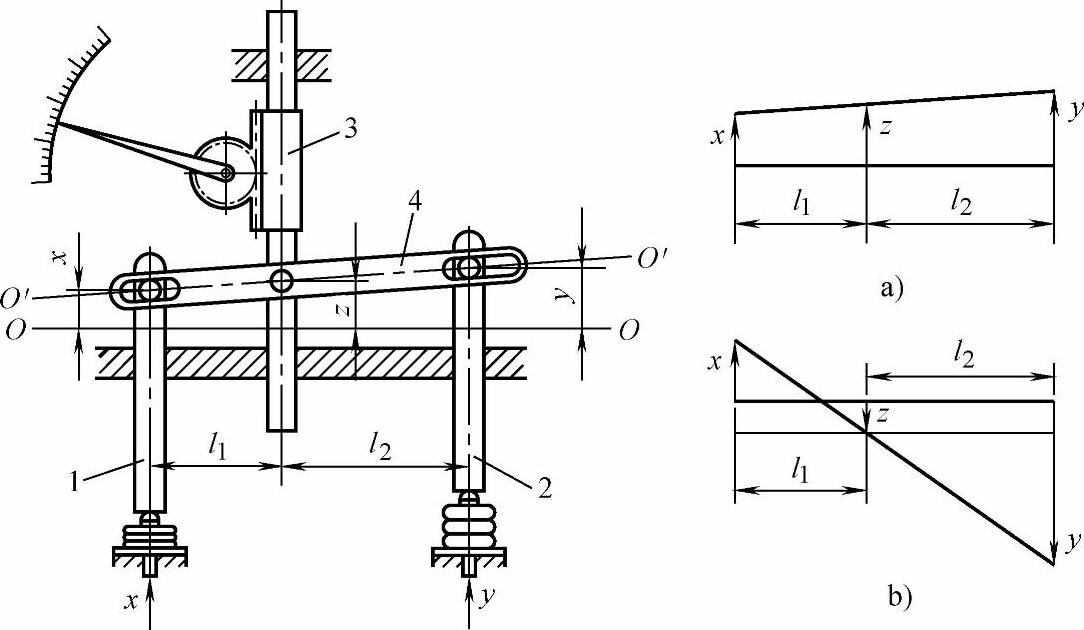
图6-9 连杆式差动加法机构的应用
a)两个输入量都为正 b)两个输入量为一正一负
1、2、3—导杆 4—连杆
若位移x和y的方向相反,则由图6-9b所示的几何关系得
当l1=l2时 
即
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。