




图6-3 平行板式差动机构
1、2—平板 3—滚子
齿条式差动机构是最基本的差动机构,它由图6-3所示的平行板式差动机构演变而来。
图6-3所示的平行板式差动机构由两块相互平行的平板1和2以及滚子3组成。当两平板有相对位移时,滚子作纯滚动。这时滚子中心的位移z就是两平板位移量x和y的代数和。
图6-4所示的齿条式差动加法机构就是根据平行板式差动机构制成的,它由齿条1和2以及齿轮3组成。当两齿条同时或先后作不等量x和y移动时,则齿轮3轴心的移动量为z。它们的关系式具体分析如下所述。

图6-4 齿条式差动加法机构
1、2—齿条 3—齿轮
当齿条2固定不动,齿条1移动量为x时,由于瞬时运动的半径比为r/2r=1/2,所以齿轮轴心的移动量zx为zx=x/2。
同理,当齿条1固定不动,齿条2移动量为y时,齿轮轴心的移动量zy为(https://www.xing528.com)
zy=y/2
如果将齿条1和2同时或先后各移动x和y,则齿轮轴心的总移动量z为
z=zx+zy=(x+y)/2
若两齿条的位移量相等而运动方向相反,则齿轮所处的位置不变,即z=0;若两齿条的位移量相等而运动方向相同,则齿轮轴心的总位移量z与齿条的位移量x和y及方向完全相同,即z=x=y;若两齿条的位移量方向相反巨不相等,则齿轮轴心的总位移量为z=(x-y)/2或z=(-x+y)/2。
如果把齿条式差动机构的两齿条和齿轮分别以蜗杆和蜗轮代替,则有如图6-5所示的蜗杆蜗轮式差动加法机构。这种机构可把两个旋转输入量合成为一个移动量。假定两蜗杆1和2的节距均为t,它们的输入转数分别为n1和n2,那么根据齿条差动原理,蜗轮3的轴心的输出位移量z为

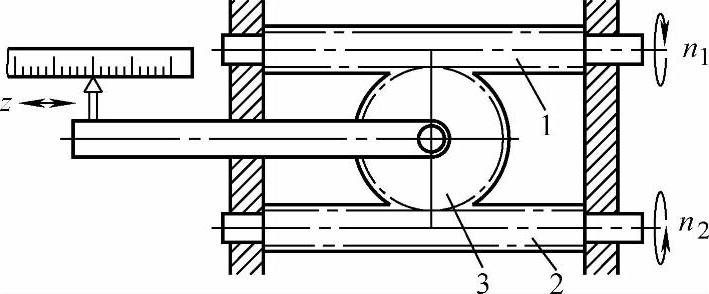
图6-5 蜗杆蜗轮式差动加法机构
1、2—蜗杆 3—蜗轮
式中,n1和n2的大小和方向对z的影响与齿条式差动机构完全相同。图6-1c所示的螺杆式差动加法机构的原理与蜗杆蜗轮式相同。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。