



能将两个或两个以上输入量(某种运动参数)进行代数相加(运动合成)的机构称为加法机构。
加法机构的输入量可以是直线运动的线性值,也可以是回转运动的角度值。由机械原理可知,加法机构具有的自由度数应与输入量的个数相等。常见的加法机构一般是两个输入量。表示各输入量的主动构件与表示输出量的从动构件之间有一定的传动比关系。
加法机构有许多机构可以实现,而最广泛应用的是差动机构。作为加法机构用的差动机构,一般有如图6-1所示的齿条式、锥齿轮式、螺杆式和连杆式四种。
利用这些差动机构都可进行两个输入量的代数和运算。两个输入量和输出量的变换关系可以是:
1)把两个回转输入量合成为一个回转输出量(见图6-1b所示的差动锥齿轮机构)或合成为一个直线位移(见图6-1c所示的差动螺杆机构)。
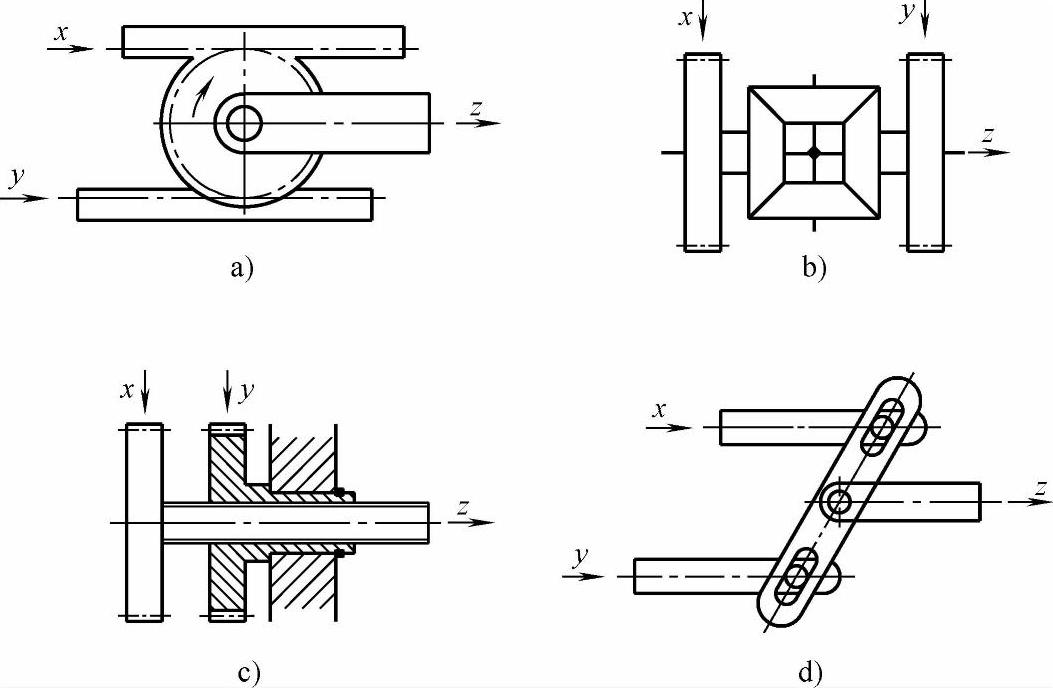
图6-1 差动机构的基本形式
a)齿条式 b)锥齿轮式 c)螺杆式 d)连杆式(https://www.xing528.com)
2)把两个直线位移输入量合成一个直线位移输出量(见图6-1a所示的齿条差动机构和图6-1d所示的差动连杆机构)。
锥齿轮式差动机构的输入量范围一般不受限制,但其他三种机构则因齿条、螺杆和杠杆的长度有限而使其输入量范围受到限制。
差动机构主要由三个基本部分组成,其中两个是输入构件(或部件),表示运动的输入量x和y,一个是输出构件(或部件),表示运动的输出合成量z。输入量和输出量的大小和方向都可在工作过程中连续变化,因此这种机构应用于连续工作的控制系数装置、测量装置和运算环路等是方便的。
差动机构一般用图6-2所示的符号或简图表示。其中,图6-2a、b用于传动简图,图6-2c用于传动原理图。
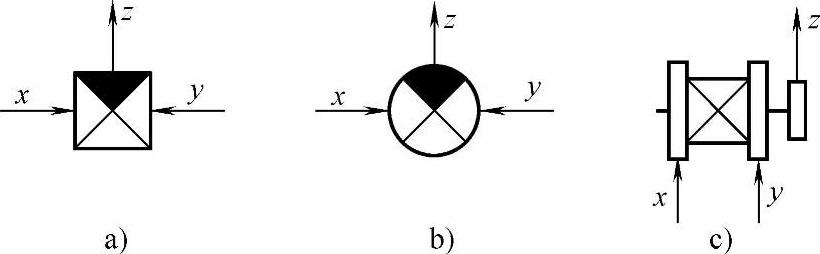
图6-2 差动机构的符号和简图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。