



机-光杠杆是把测杆的位移量通过一定形式的机械杠杆的传递,变换为反射光线的偏转量,从而使被测微动量放大显示的一种机构。
图5-14所示机构是利用“正弦-正弦”型杠杆1和具有反射镜2的“正切-圆弧”型机-光杠杆组成的放大系统。
当测杆微动量为y时,经杠杆1放大为Y′,然后通过中间传动杆3向机-光杠杆传递使反射镜2摆转β角。于是反射光线转移了2β角,从而获得与y相对应的放大量Y。按几何关系求得机构的放大倍数为
由上式可知,放大倍数是随y的变化而变化的。因此从理论上来讲,刻度盘是不能按线性关系刻制的。但在实际应用中,y在很小的范围内变化,机-光杠杆的摆转角β也很小,可近似地看作“圆弧-圆弧”式放大。所以放大倍数也可看作常数。
如果把中间传动杆3与反射镜2的安装架设计成如图5-4c所示的齿条与齿轮啮合形式。那么,此机-光杠杆部分则变成“圆弧-圆弧”型的对应式。于是整个机构的放大倍数就是常数,即η=1。这时,假定齿轮的节圆半径为l3,则放大倍数M为
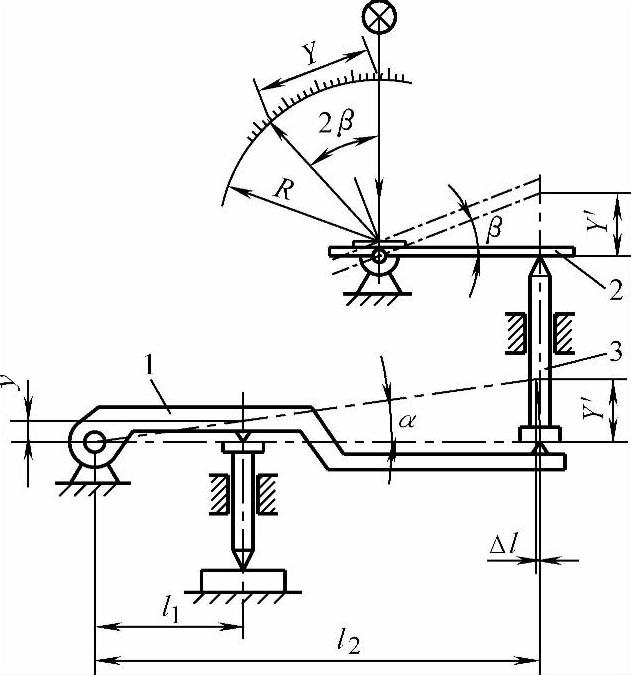
图5-14 机-光杠杆式测微放大机构
1—杠杆 2—反射镜 3—中间传动杆
 (https://www.xing528.com)
(https://www.xing528.com)
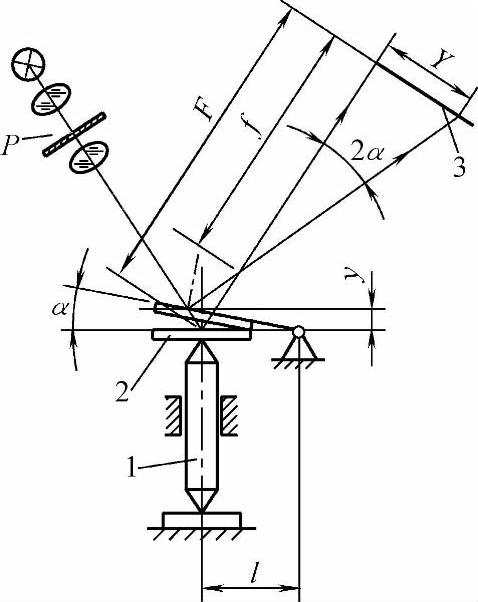
图5-15 “正切-正切”型机-光杠杆测微放大机构
1—测杆 2—反射镜 3—显示屏
图5-15所示是“正切-正切”型机-光杠杆式放大机构。通过针孔P的光线变为平行光线后投射到反射镜2上,并反射到显示屏3上形成针孔像。当反射镜2随测杆1的微量移动y而摆动α角时,由几何证明,反射光线则以2α角放大射到显示屏上,从而产生针孔像的移动量Y。F为反射镜与测杆的起始接触点A至显示屏3的距离,在测微机构中,α变化很小,f≈F,所以其放大倍数计算如下:
由几何关系,有y=ltanα
Y=ftan2α≈Ftan2α
所以放大倍数为

由上式可知,放大倍数不是常数。但当α在很小范围内变化时,可近似地看作为常数,即
M=2f/l
此种机构原理在光学比较仪、光学指示器、粗糙度测定仪和自动准直仪中均有应用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。