



机械杠杆在测量仪表中广泛用作测微放大机构。其优点是结构简单,加工容易,工作可靠,反应灵敏。这里举两个应用例子。
(1)在记录器中的应用
测量和记录物体表面状况(如零件的表面粗糙度)、物体运动规律(如振动)或电信号变化等的测量仪器,常用于机械杠杆作为测微放大并作记录的机构。这种记录机构是利用杠杆式记录笔把被测位移量直接放大为记录图形的。
图5-10a所示是采用“正切-圆弧”型杠杆记录笔2,把测杆1的直线位移量进行放大和记录成图形的记录机构。
图5-10b所示是把位移量转换为放大电流信号来驱动笔电动机4作往复旋转运动,从而带动“圆弧-圆弧”型杠杆记录笔2进行放大和记录为图形的记录机构。
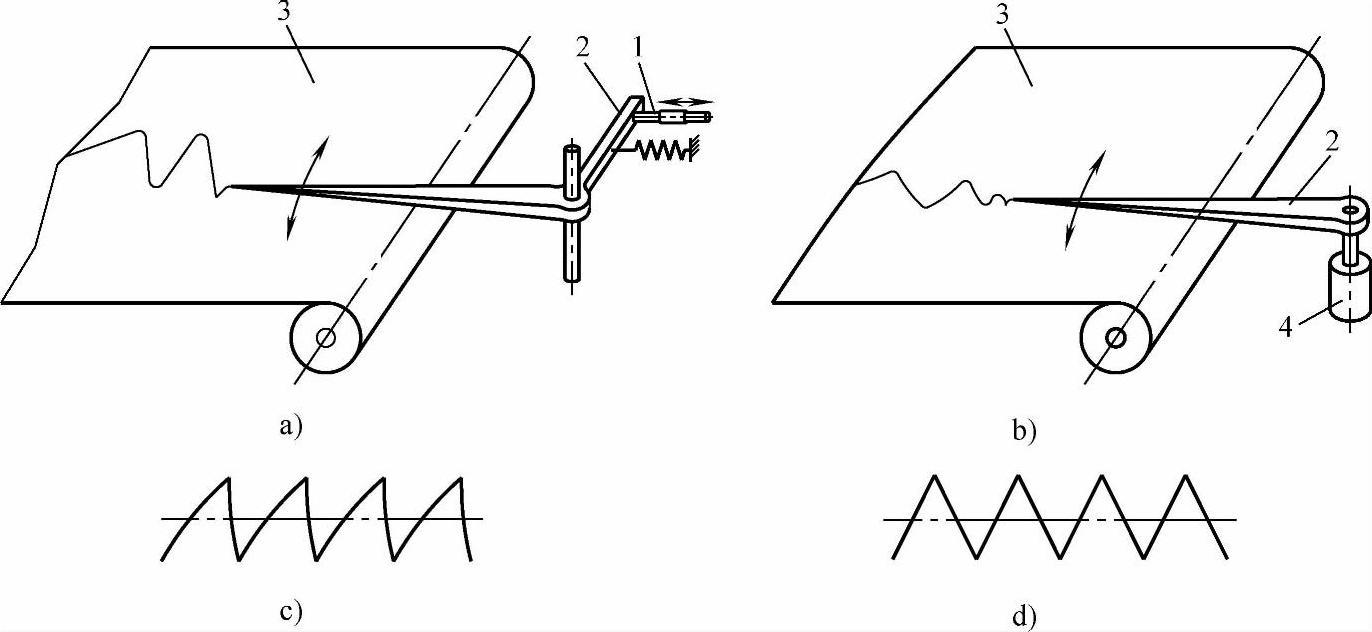
图5-10 杠杆式测微放大记录机构
a)“正切-圆弧”型 b)“圆弧-圆弧”型 c)有圆弧失真的记录图形 d)无圆弧失真的记录图形
1—测杆 2—杠杆记录笔 3—记录纸 4—笔电动机
上述两种记录机构的缺点是会产生圆弧失真。比如,若记录笔作等幅的圆弧摆动,记录纸作匀速直线运动,则记录图形会出现如图5-10c所示的圆弧失真。如果记录笔的笔尖能作等幅直线摆动,那么记录图形就不会出现圆弧失真(见图5-10d)。
为使杠杆型记录笔在记录时不产生上述的圆弧失真,可把笔尖的运动规律设计成正切型的直线摆动。为实现这种运动规律,应先分析图5-11所示的机构。杆L与滑块A、B铰连,当滑块A、B分别沿y轴和x轴作直线移动时,杆L上某一点M的运动轨迹可用如下方程描述:
显然,这是椭圆方程,a是椭圆的长半轴,b是短半轴。这也就是众所周知的椭圆机构。根据这种机构的运动规律,便可改变上述记录笔笔尖的运动性质。
反之,如果能使M点作椭圆运动,则杆L的端点A(可视为笔尖)和B就可作直线运动。但是,要使M点预先作椭圆运动是困难的。不过,由于记录器的笔尖运动幅度一般不大,所以M点在一定范围内可按某一半径r作圆周运动来代替椭圆运动,半径r可根据椭圆作图原理求出。若长半轴a和短半轴b已定,则

 (https://www.xing528.com)
(https://www.xing528.com)
图5-11 椭圆轨迹机构
若a=b,则x2+y2=a2。这就是说,M点在杆L的中点,并以r=a作圆周运动时,A、B两端点作直线运动。
图5-12所示是大多记录器采用的记录笔运动机构,它们都是按上述椭圆轨迹或圆轨迹运动的机构原理设计的。
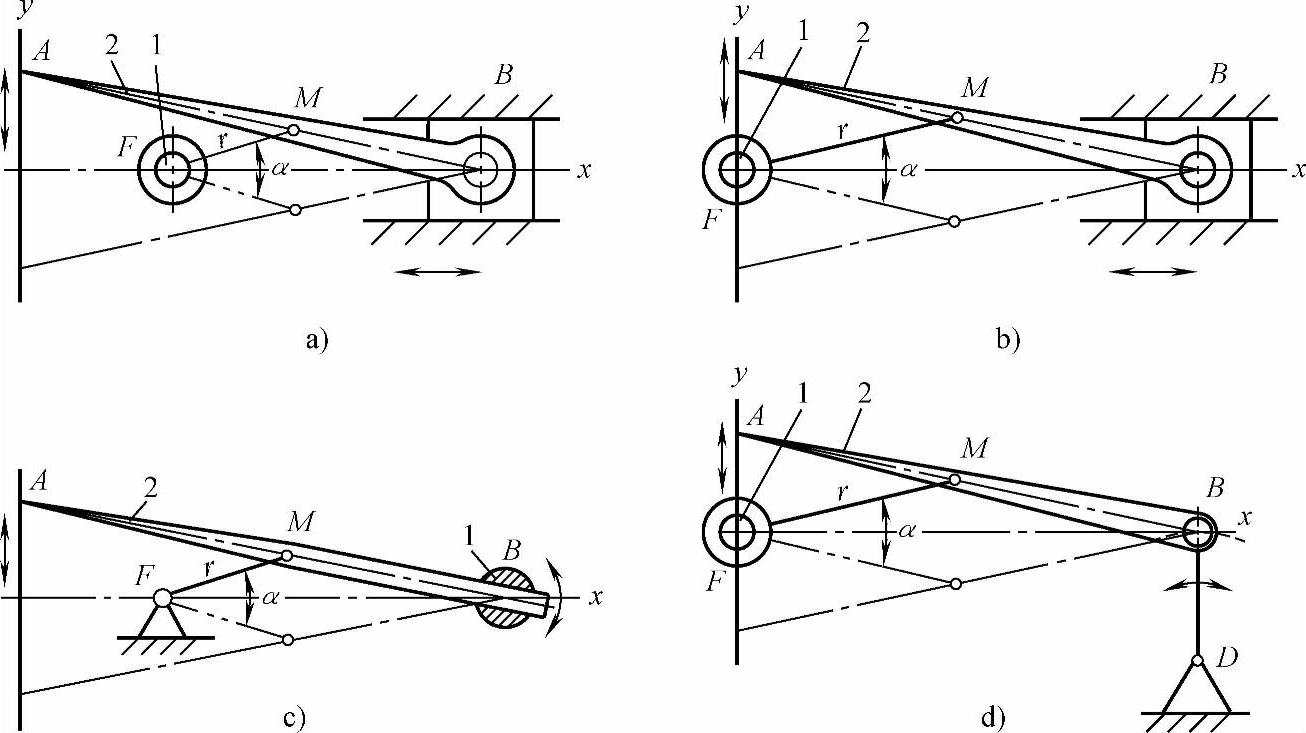
图5-12 杠杆记录笔运动机构
1—磁电式机构 2—记录笔
图5-12a、b所示两个机构的共同点是:连杆r与磁电式机构1的轴端F固连,磁电式机构随测量信号电流的变化在幅角α内往复转动,从而通过连杆r驱动记录笔2摆动,同时笔尖A作直线运动。不同的是:前者的M点运动规律是按椭圆轨迹原理设计(r≠AM≠MB),后者则是按圆轨迹原理设计(r=AM=MB)。
图5-12c所示机构的特点是:磁电式机构1置于B点,其轴端连有开槽的接头。当磁电式机构在幅角α范围内转动时,记录笔2在接头槽内随之摆动并移动。笔尖A作近似直线运动。
图5-12d所示机构是图5-12b所示机构的转化机构。这时B点不是沿直线滑动,而是作以D为圆心、BD为半径的圆弧摆动。构件BD越长,B点的轨迹越接近直线,因而A点的运动轨迹也越接近直线。这种机构原理在自动化仪表中常被用在指针的指示机构中。
(2)在测微仪中的应用
图5-13所示机构是杠杆机构在测微仪中的应用。这实质上是“正切-圆弧”型杠杆机构。当测杆1移动时,通过刀口连杆2推动V形杠杆3绕固定刀口4摆动,从而带动指针转动,并指示出相应的示值。弹簧5的作用是保持传动链的力封闭,弹簧6则用来产生一定的测量力。
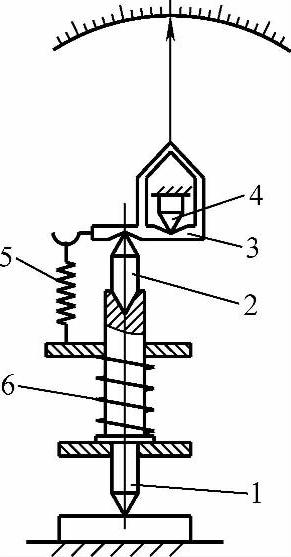
图5-13 测微仪杠杆式放大机构
1—测杆 2—刀口连杆 3—V形杠杆 4—固定刀口 5、6—弹簧
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。