



【摘要】:行星轮系具有传动比大、结构紧凑等优点,所以适合用作微调机构。行星轮系主要由行星齿轮、太阳轮和转臂组成,其结构形式很多,可根据使用要求设计成各种各样的调节机构。图4-25所示为少齿差行星轮系微调机构,它由偏心轴1、行星齿轮2、太阳轮3、联轴叉4和输出轴5组成。偏心轴1实际上就是行星轮的转臂,是主动件,通过装在其上的旋钮输入调节运动。有些高精度晶体振荡器的调节机构就是根据行星轮系传动原理设计的。
行星轮系具有传动比大、结构紧凑等优点,所以适合用作微调机构。
行星轮系主要由行星齿轮、太阳轮和转臂(或叫行星架)组成,其结构形式很多,可根据使用要求设计成各种各样的调节机构。图4-25所示为少齿差行星轮系微调机构,它由偏心轴1、行星齿轮2、太阳轮3、联轴叉4和输出轴5组成。图4-25b所示为其原理图。
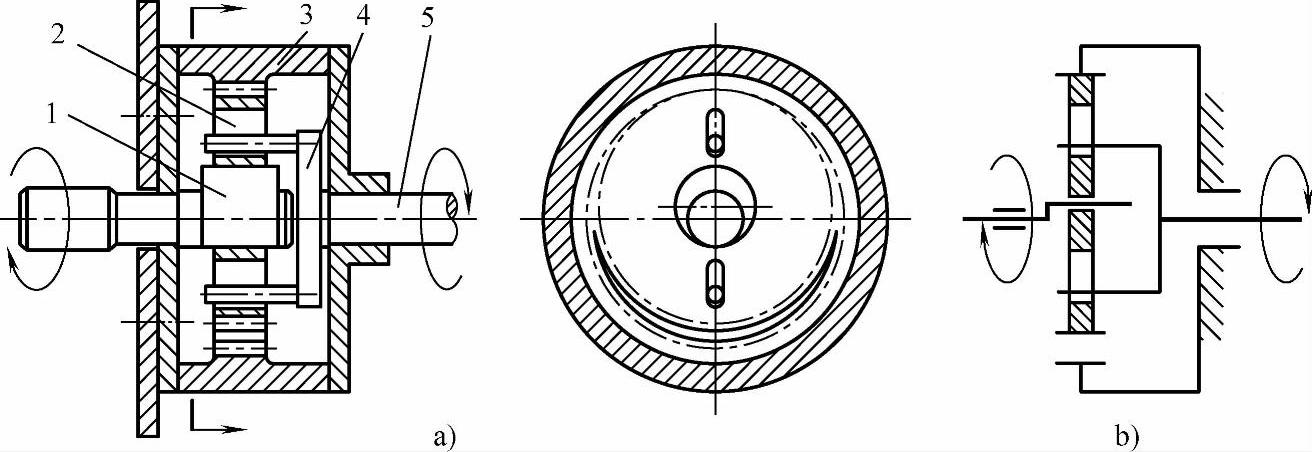
图4-25 少齿差行星轮系微调机构
a)结构图b )原理图(https://www.xing528.com)
1—偏心轴 2—行星齿轮 3—太阳轮 4—联轴叉 5—输出轴
太阳轮3与外壳固定不动。偏心轴1实际上就是行星轮的转臂,是主动件,通过装在其上的旋钮输入调节运动。行星齿轮2的转速通过联轴叉4传给输出轴5,然后由输出轴5去控制被调节对象,以获得所需的调节量。
由机械原理可知,偏心轴1对输出轴5的传动比i15为i15=z2/(z3-z2)。式中z2和z3分别是行星齿轮2和太阳轮3的齿数。若z3-z2=1,则i15=z2,这就是一齿差行星轮系。如果选定z2=100,z3=101,则i15=-100。显然,对于如此大的传动比,若采用普通轮系,则会给结构设计带来麻烦,体积和质量都要增加。而仪器调节机构往往是要求具有结构紧凑、传动比大、调节量微小巨反应灵敏等特点的机构。
有些高精度晶体振荡器的调节机构就是根据行星轮系传动原理设计的。将这种微调机构的输出轴接振荡器中的电容器,能精确地调节其电容量而获得非常精确的晶振频率。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。