



螺旋-杠杆组合微调机构是利用杠杆把螺杆的调节量缩小若干倍来提高机构微调的灵敏度。机构微调量的大小,取决于杠杆的级数和臂长比。所以,这种机构的设计主要是根据微调精度要求来选择杠杆的级数和臂长比。在大多数情况下,采用一级(最多两级)杠杆和尽可能大的臂长比就可以获得较好的微调精度。
(1)螺旋-单级杠杆组合微调机构
采用单级杠杆的螺旋微调机构的基本形式如图4-16所示,包括直杆式(见图4-16a、b)和弯杆式(见图4-16c)等形式。由图4-16可见,对于直杆式,若杠杆的支点在输入运动和输出运动的作用点之间,则两调节运动方向相反(见图4-16a);若杠杆的支点在两运动作用点的同一侧,则两调节运动方向一致(见图4-16b);图4-16c所示的弯杆式机构,其两调节运动方向互成某一角度(如90°)。
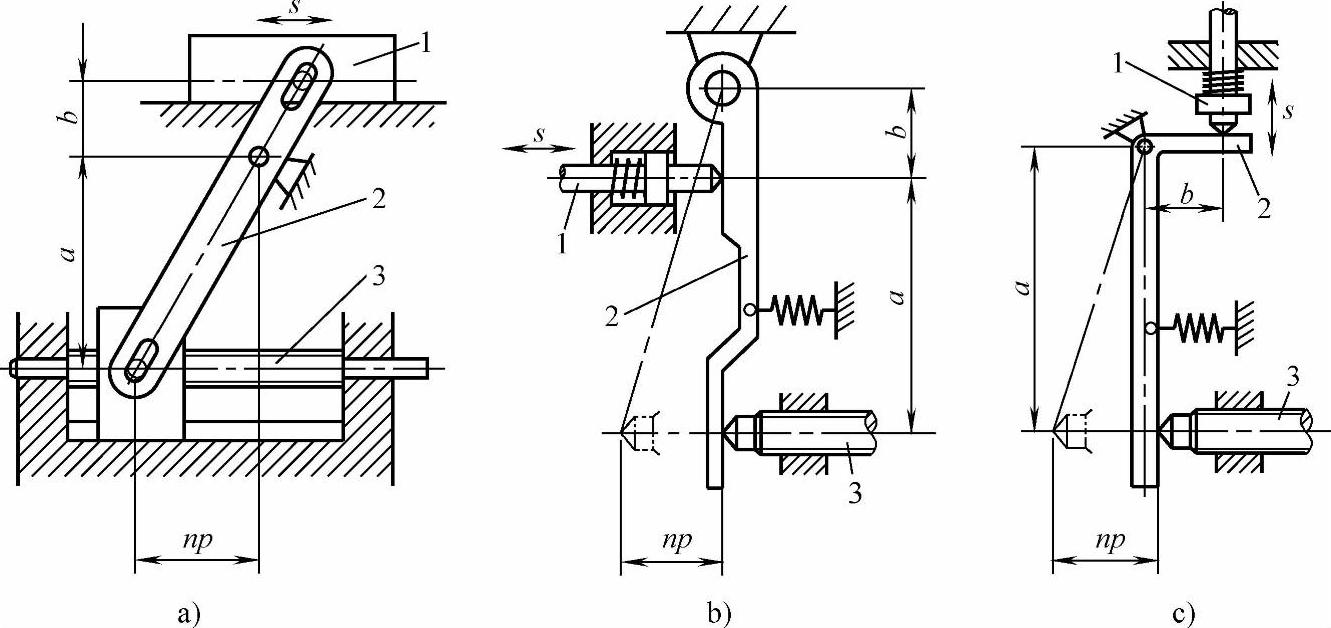
图4-16 螺旋-单级杠杆组合微调机构
a)、b)直杆式 c)弯杆式
1—输出构件 2—杠杆 3—螺杆
机构主要由输出构件1、杠杆2和螺杆3组成。输出构件的微动量s的范围一般都很小,它与螺杆的输入调节量nP有如下关系:
式中 s——输出构件的微动量(mm);
P——螺杆螺距(mm);
n——螺杆转数;
a、b——分别为杠杆长(mm)、短臂的长度(mm)。
于是螺杆调节手轮转值A为
A=s/n=(b/a)P
根据转值的大小和实际控制精度要求,则可选择合适的螺距P和杠杆的臂长比b/a及其几何尺寸。为便于指示或读取调节量的大小,还可以根据转值大小及其代表的物理量设计相应的刻度盘和确定它的分划线数。(https://www.xing528.com)
例如,采用图4-16b所示的微调机构,当螺距P=0.5mm,杠杆臂长比为b/a=1/4,则螺杆转一周时,输出构件1的微动调节量为

于是螺杆调节手轮转值A为
A=s/n=0.125mm/1r=0.125mm/r
如果手轮装有刻度盘,在刻度盘的圆周上均匀地刻有50个刻度,则每个刻度的读数为 ,这样的微调量已相当精确。
,这样的微调量已相当精确。
(2)螺杆-两级杠杆组合微调机构
图4-17所示是由两级杠杆和螺杆组合而成的微调机构,图4-17a、b所示的分别是并联式和串联式。

图4-17 螺杆-两级杠杆组合微调机构
a)并联式 b)串联式
并联式可使结构紧凑,而巨可以实现同轴线调节;而串联式适用于输入与输出相距较远或需要跨越某些构件的调节装置。
两级杠杆与螺杆组合的微调机构可获得较大的缩小倍数。输出构件的微动量s与螺杆的输入量nP的关系为
上述螺旋-杠杆组合微调机构,具有结构简单、刚度好、反应灵敏、容易制造和价廉等优点,所以不少仪器(如光学经纬仪、金相显微镜等)的微调机构都采用这种原理设计。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。