



图3-20所示是典型的不等长连架杆双摇杆机构的运动轨迹。主动摇杆a作匀速摆动时,驱动连杆b作非整周的翻转运动。若四构件a、b、c和d的长度关系为b=asinα, ,则连杆b可作90°的翻转运动。所以,这种机构可应用于翻转装置和门盖的开关装置等。
,则连杆b可作90°的翻转运动。所以,这种机构可应用于翻转装置和门盖的开关装置等。
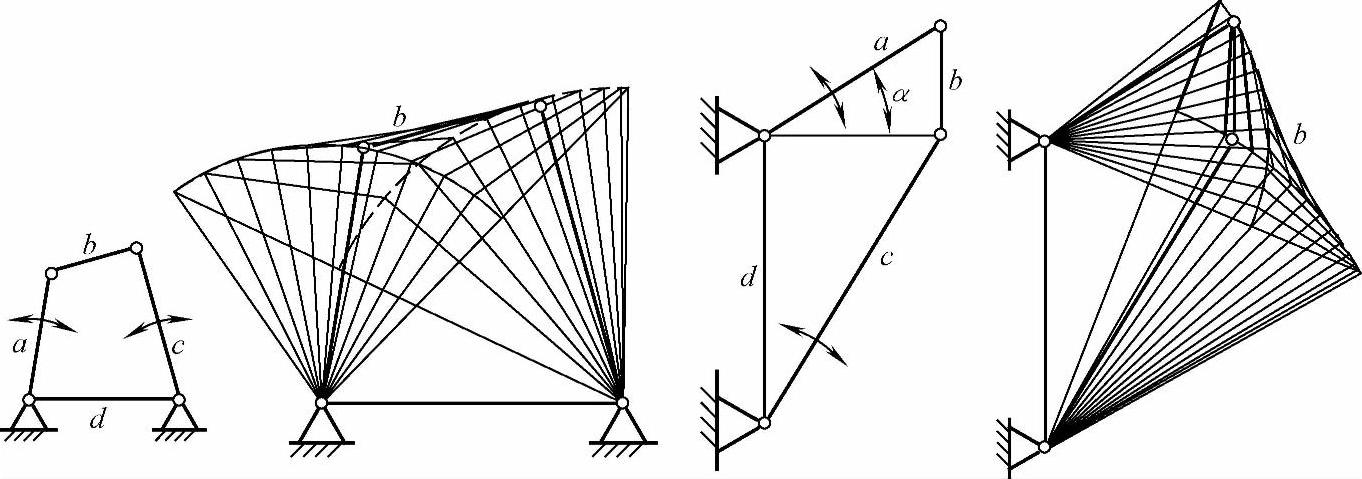
图3-20 不等长双摇杆机构的运动轨迹
如果在这种双摇杆机构的连杆b的一侧或两侧作延长线,则这延长线的端点E的运动轨迹有如图3-21所示的形状。
图3-21a所示的机构中,在连杆b的一侧作延长线,其端点E的运动轨迹是由近似直线和圆弧组成的曲线。该机构应用于进料装置和机械手,轨迹近似直线部分可用于作平移运动传送物件的机构,如吊车吊钩。
图3-21b所示的机构中,连杆b的两端延伸线的端点E′和E″的运动轨迹,分别与图3-21a所示机构的E点相同,只是两端动作上下对称交替地进行。
图3-21c所示的机构中,连杆b的引出线,与连杆呈一定的角度。其端点E的运动轨迹也是由近似直线和圆弧组成的曲线,巨直线段比较平直。
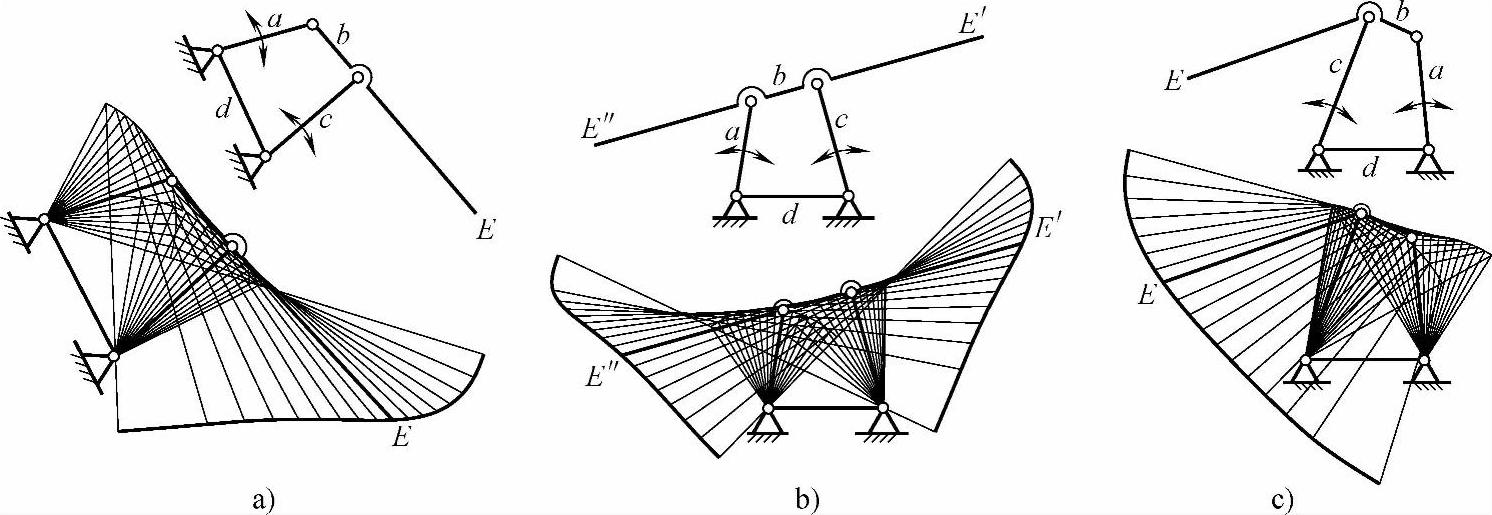
图3-21 不等长双摇杆机构的连杆延长线的端点E的运动轨迹
根据双摇杆机构的运动特性可知,连杆延长线端点E的运动轨迹近似于直线,所以用这种机构可做成如图3-22所示的推料或传递工件的装置。
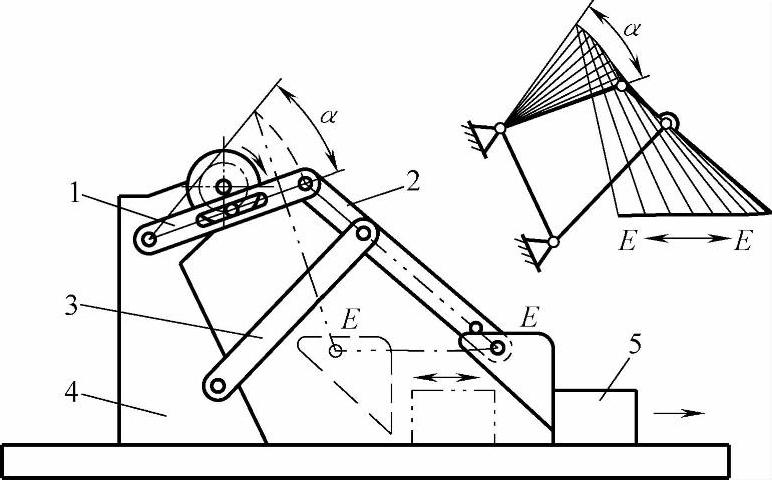
图3-22 不等长双摇杆机构用于推料或传递工件的设备(https://www.xing528.com)
1—摇杆 2—连杆 3—从动连架杆 4—机架 5—物料
机构中的摇杆1是主动构件,可用电动机带动曲柄圆盘上的传动销来驱动,也可以用直动气缸来驱动。连杆2的端点E装有推料头(或料斗)。当摇杆1在α范围内摆动时,推料头即可在E—E范围内作近似于直线的往复运动,从而完成对物料5的进料工作。
大吊车吊钩作水平直线运动的机构,也是按此原理设计的。
图3-23所示是双摇杆机构应用在快速夹紧中的例子。此装置中的双摇杆机构由主动连架杆1、连杆2、从动连架杆3和机架4组成。这四构件的铰接点依次为A、B、C和D。主动连架杆1在摆动气缸5的驱动下,通过连杆2把从动连架杆3延伸端的压头摆向工件。当A、B和C三铰接点共线时,机构处于死点位置,于是把工件压紧。
图3-24所示为不等长双摇杆机构及其连杆中垂线端点E的运动轨迹。两机构类型完全相同,只是连杆b的中垂线长短不同,因而其端点E的运动轨迹也不同。图3-24a的中垂线较长,运动轨迹为一人字形曲线,由两条近似于直线的分段组成;图3-24b的中垂线较短,运动轨迹为一开口环形曲线。
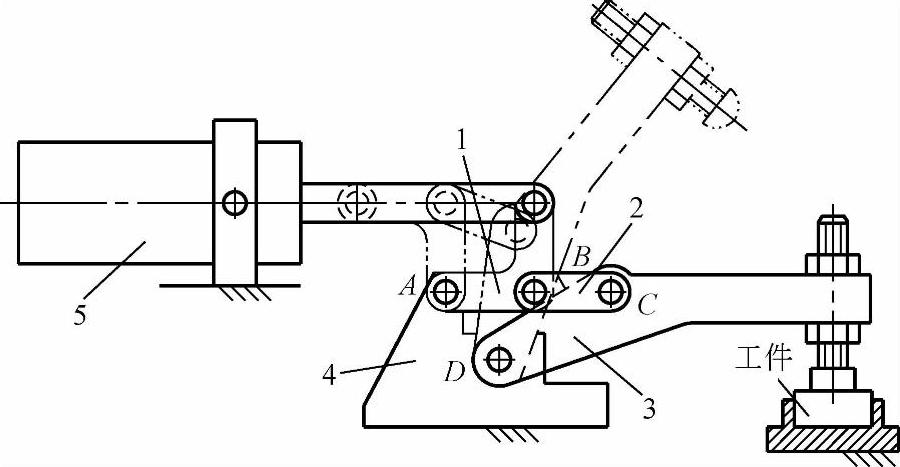
图3-23 不等长双摇杆机构用于快速夹紧
1—主动连架杆 2—连杆 3—从动连架杆 4—机架 5—摆动气缸
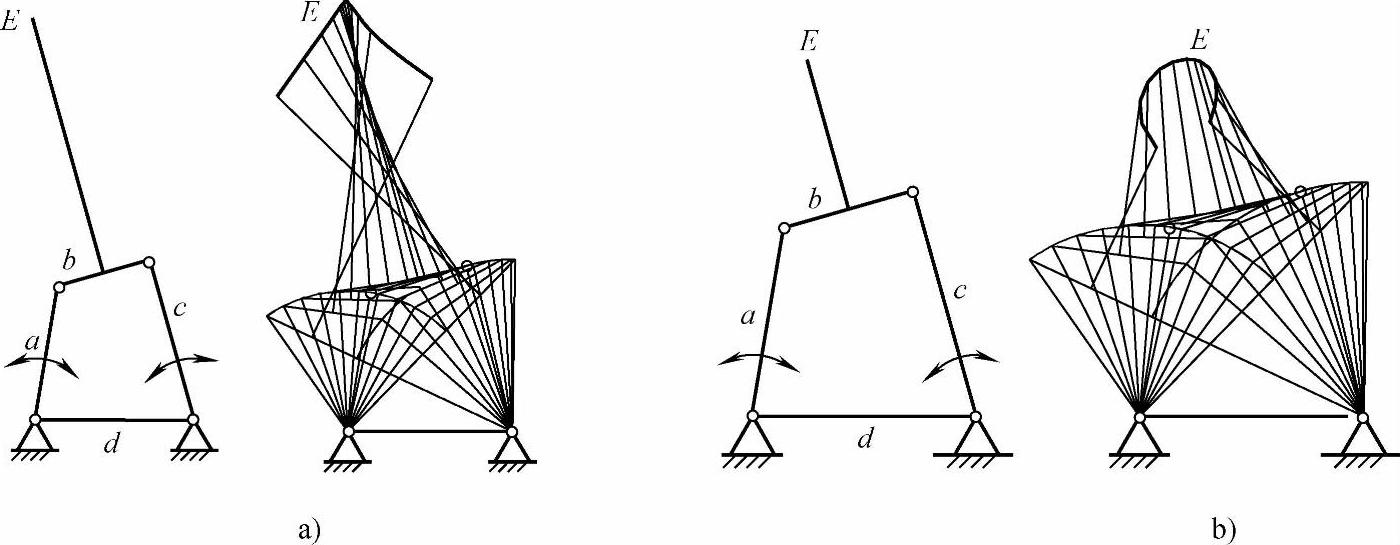
图3-24 不等长双摇杆机构及其连杆中垂线端点E的运动轨迹
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。