



平行四边形双曲柄机构实质上是等长连架杆平面四杆机构。其基本形式有四种,如图3-7所示。
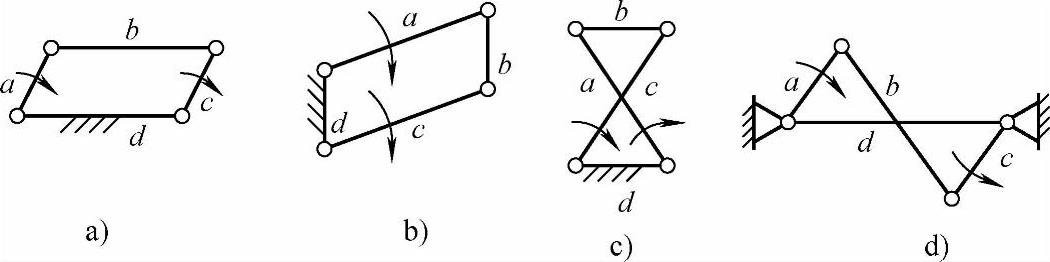
图3-7 平行四边形双曲柄机构类型
a)短曲柄同向运动平行四边形机构 b)长曲柄同向运动平行四边形机构 c)同向运动反平行四边形机构 d)反向运动反平行四边形机构
上述四种机构都存在一个共同点,即主动曲柄a转至与机架d重合时,从动曲柄c也与机架d重合。这时,机构处于死点位置,其运动方向将成为不确定状态,即此时的主动曲柄继续向前转动时,从动曲柄有可能与主动曲柄同向转动,也可能反之。
若要求从动曲柄按预定方向越过死点继续向前转动,需采取如下至少一种措施:
1)附加辅助曲柄。
2)提高杆件的质量惯性。
3)设置死点引出器。
当要求从动曲柄到达死点位置时无需越过死点而作返回转动,只需在该点设一挡块即可。
(1)同向运动平行四边形机构运动轨迹
图3-8所示的两种同向运动平行四边形机构,当曲柄a(或c)作主动转动时,从动曲柄c(或a)作同向同速转动,而连杆b均作周转变速的平移运动。
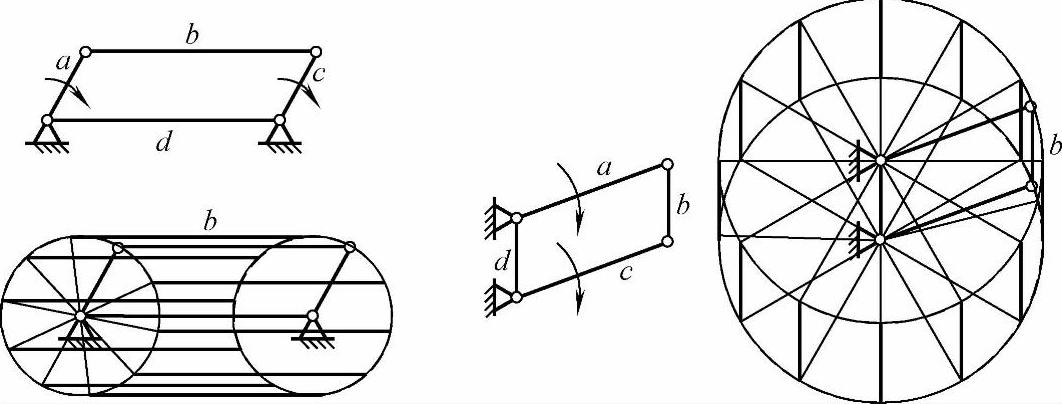
图3-8 同向运动平行四边形机构运动轨迹
图3-9所示为上述机构的连杆b的中点M及其中垂线L的运动轨迹。两者的M点的运动轨迹均是以机架d的中点为中心、以曲柄a为半径的圆。中垂线L绕机架中点作周转的平移运动。
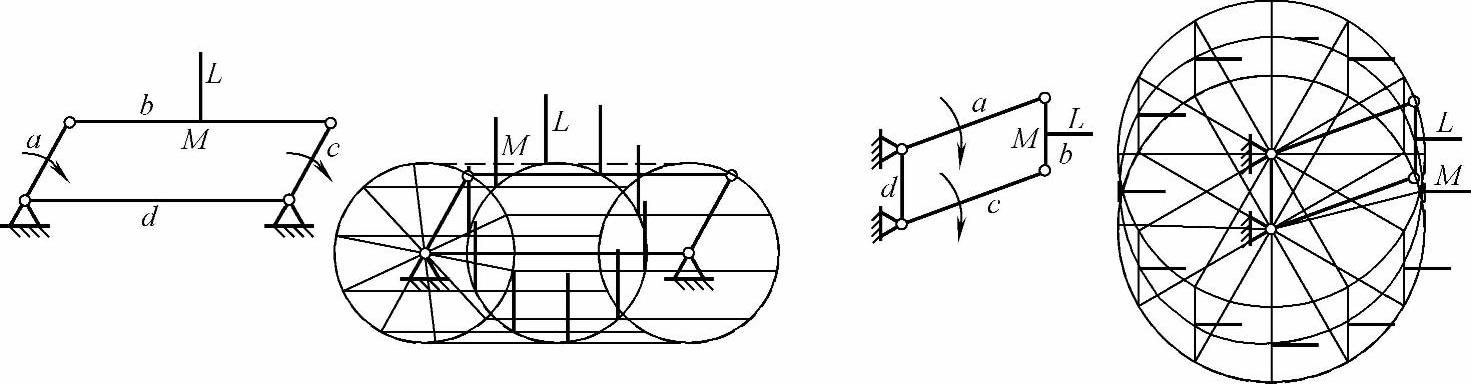
图3-9 平行四边形机构连杆中垂线运动轨迹
(2)同向运动反平行四边形双曲柄机构运动轨迹
如图3-10所示为同向运动反平行四边形双曲柄机构及其运动轨迹,该机构也是等长连架杆双曲柄机构的变形。
图3-10a所示机构的连杆b作整周的、变速的翻转运动,连杆b的中点M及杆a和杆c的交点D的运动轨迹均为椭圆,所以称为椭圆机构。
图3-10b所示机构的连杆b的中垂线端点E的运动轨迹,是一条对称于机架d的中垂线的玫瑰线形曲线。玫瑰线形曲线的极坐标方程式为:ρ=ksin(φ/3)。
图3-10c所示机构的连杆b的延长线端点E的运动轨迹,是一条对称于机架d的玫瑰线形曲线。这种玫瑰线形曲线的极坐标方程式为:ρ=kcos(φ/3)。
可见,图3-10b、c可作为玫瑰形曲线的极坐标几何计算机构。同时表明,E点运动速度的变化规律是内环慢,外环快,速度变化剧烈。
这种机构应用在速度快慢变化特殊的环形传动装置、机械手、娱乐器械及动态灯饰等。
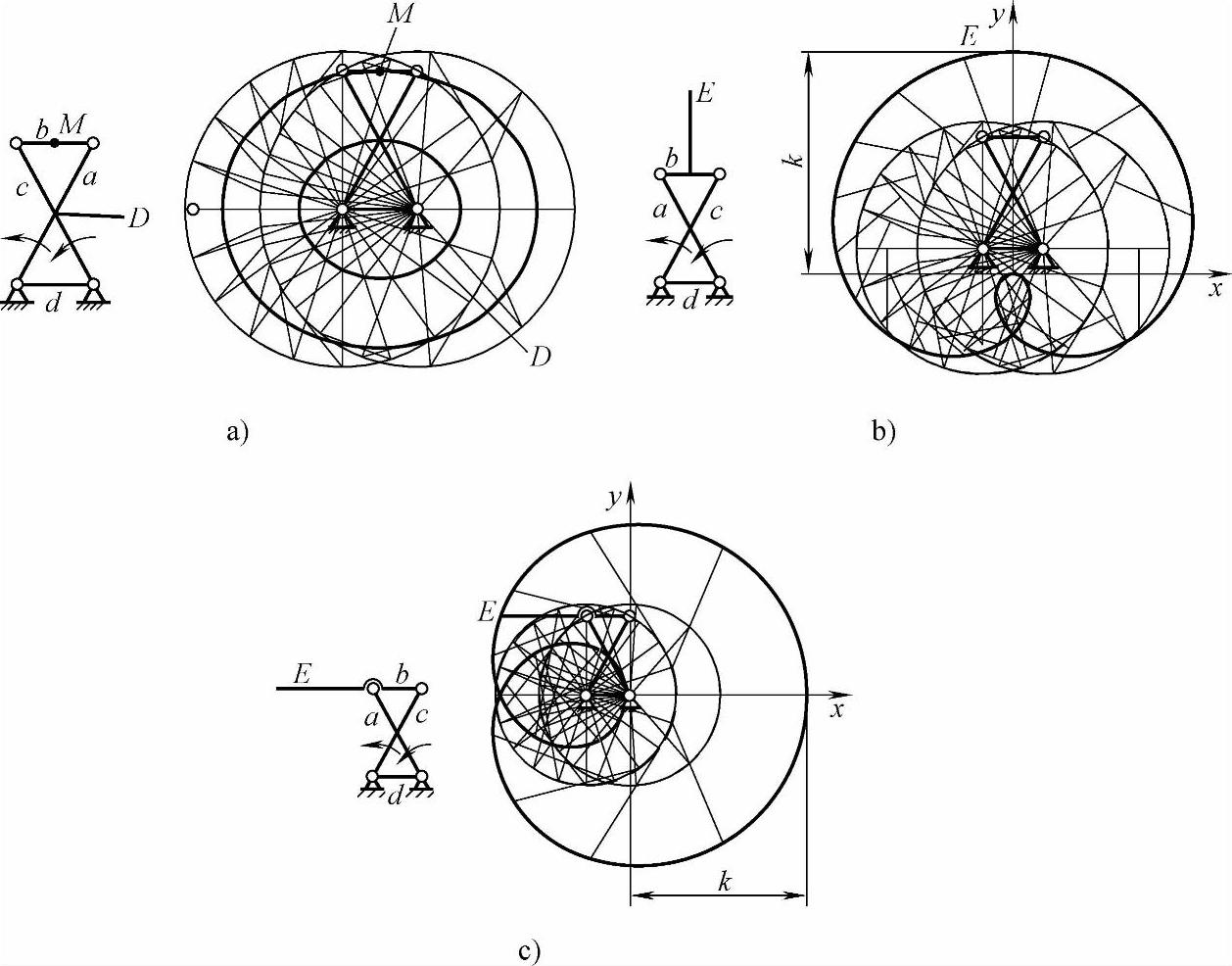
图3-10 同向运动反平行四边形机构及其运动轨迹
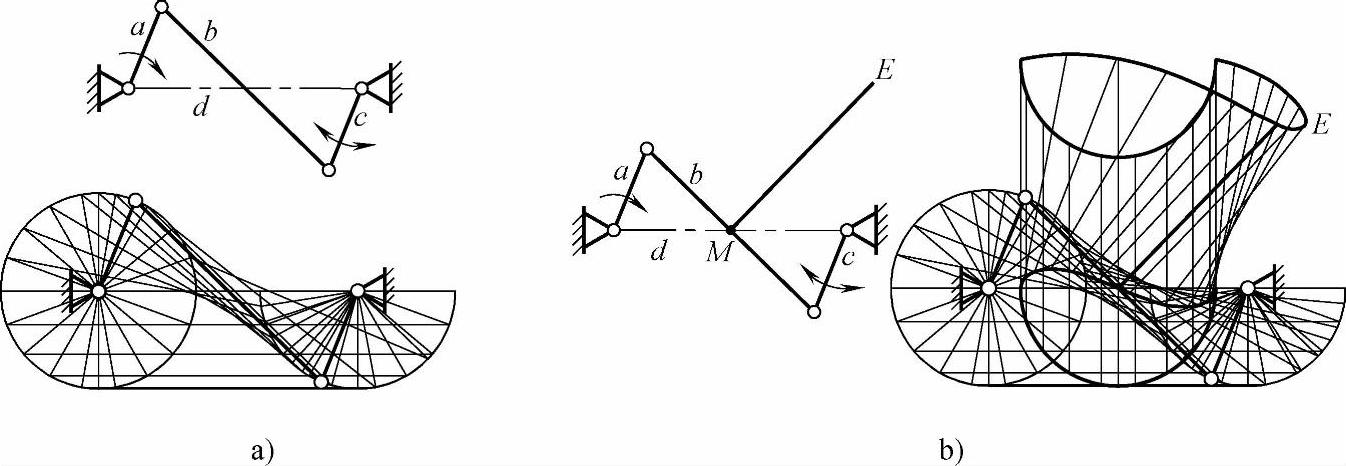
(3)反向运动反平行四边形双曲柄机构运动轨迹
反向运动反平行四边形机构连杆b与机架d相交叉。当主动曲柄a转到与机架d重合时,从动曲柄c因处于不确定状态,有可能继续向前转动,也可能反向转动,所以机构的运动轨迹也会出现两种状态。
1)当从动曲柄到达与机架共线的位置时,若需越过死点继续向前转动,则连杆b及其上的一些点的运动轨迹如图3-11所示。图3-11a所示的机构中,连杆b对称于机架d作往复变速移动兼摆动。图3-11b所示的机构中,连杆b的中点M及其中垂线的端点E的运动轨迹是条横8字形曲线。
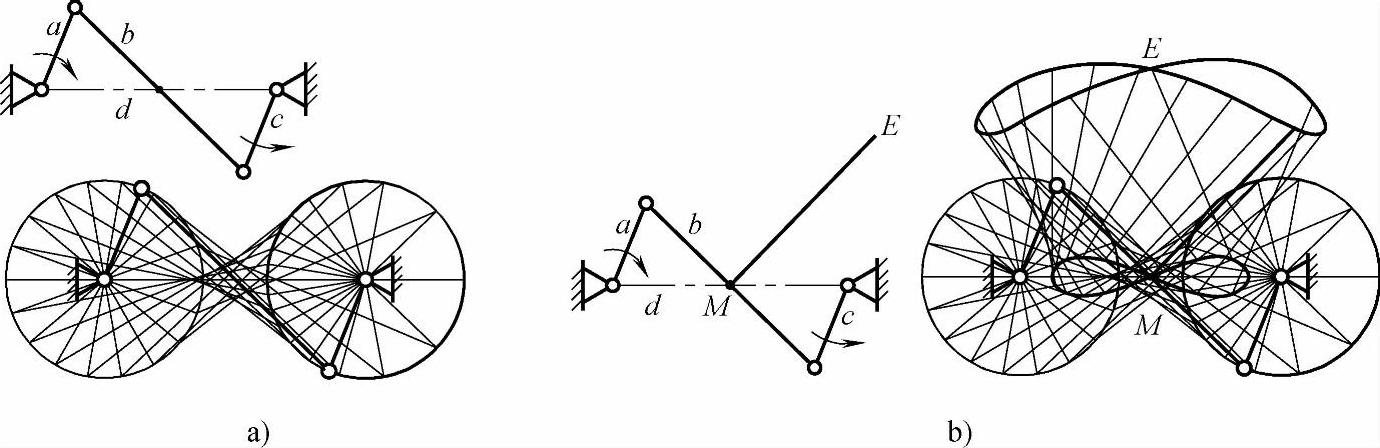
图3-11 反向运动反平行四边形机构及其运动轨迹
2)当从动曲柄到达与机架共线的位置时,若不越过死点而反向转动,则连杆b及其上的一些点的运动轨迹如图3-12所示。图3-12a所示的机构中,当曲柄a在机架d上半周转动时,连杆b向右作变速移动兼摆动;当曲柄a在机架d下半周转动时,连杆b在机架下方向左作变速平移运动。图3-12b所示的机构中,连杆b的中点M的运动轨迹,是由对称于机架d的半个横8字形曲线和机架下方的半个圆弧组成的曲线;连杆b的中垂线的端点E的运动轨迹是一条由半圆弧和多变曲线组成的横8字形曲线。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-12 反向运动反平行四边形机构从动曲柄不越过死点时的运动轨迹
(4)平行四边形双曲柄机构的应用
平行四边形双曲柄机构应用广泛,如物料传递机构、平移运动装置、振动机、机车传动、平衡吊装机、比例仿形机、缩放机及绘图机等。
1)物件步进传递机构。图3-13所示的物件步进传递机构由平行四边形双曲柄机构组成。曲柄3连续转动,连杆1与取料器2连在一起作平移周转运动,从而把物料4逐件步进传递至出料口。传递行程及步数可根据需要设定。
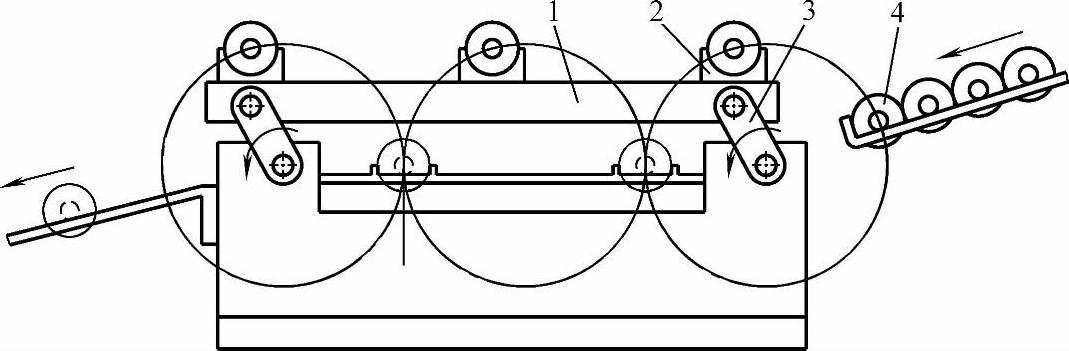
图3-13 平行四边形机构应用-步进传递物件
1—连杆 2—取料器 3—曲柄 4—物料
2)工作台周转平移运动机构。图3-14所示的物料步进传递机构由两个平行四边形双曲柄机构组成。用电动机驱动主动曲柄圆盘1转动,带动起共用连杆作用的工作台3作周转平移运动。两作用连杆的有效长度l相等。两从动曲柄2的有效长度等于曲柄圆盘的半径r。
振动台也按此原理设计,其振幅大小取决于曲柄长度r。
3)双轴同步传动机构。图3-15所示机构是由两个平行四边形双曲柄机构组成的双轴同步传动装置。用电动机驱动曲柄圆盘1带动共用连杆3,并驱动两个从动曲柄圆盘2,从而使轴A和轴B作同向等速转动。
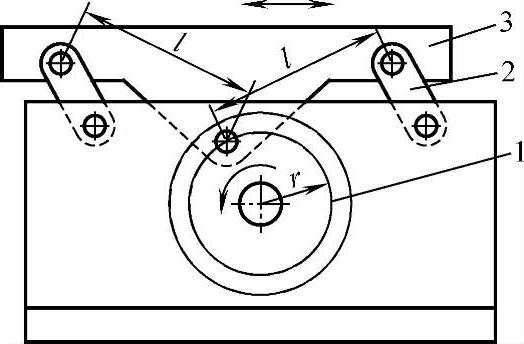
图3-14 平行四边形机构应用-工作台周转平移运动
1—曲柄圆盘 2—从动曲柄 3—工作台
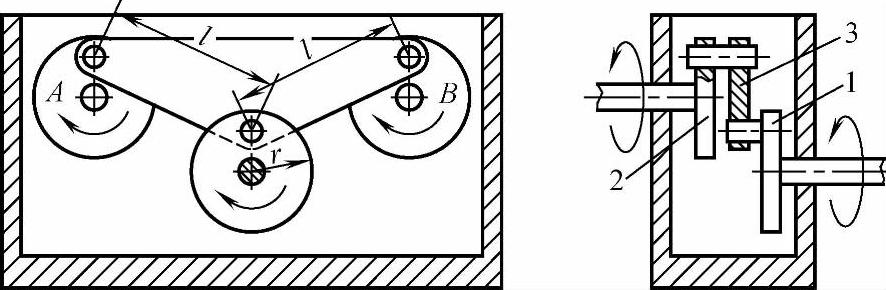
图3-15 平行四边形机构应用-双轴同步传动
1—曲柄圆盘 2—从动曲柄圆盘 3—共用连杆
同理,两作用连杆的有效长度l相等。两从动曲柄圆盘2的转动半径等于主动曲柄圆盘的转动半径r。
4)多轴同步传动机构。图3-16所示是利用四个平行四边形双曲柄机构组成的四轴同步传动装置。这种机构可用于多头钻或多头铣的设备,也可用于各种多轴同步等速的传动。
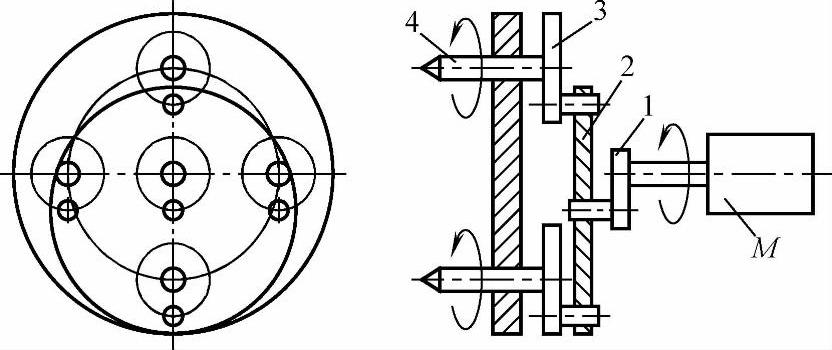
图3-16 平行四边形机构应用-多轴同步传动
1—主动曲柄 2—转盘 3—曲柄 4—输出轴
传动原理:电动机M驱动主动曲柄1连续转动,并带动发挥公共连杆作用的转盘2作周转平移运动。然后使四只等长曲柄3绕各自输出轴4作同步等速转动。各输出轴端可装上刀具(如钻头、铣刀)或其他所需的传动构件。
5)物料翻转传递机构。利用同向反平行四边形机构的翻转运动特性,可作出如图3-17所示的物料翻转传递机构。机构的主动连架杆a由摆动气缸1驱动,连杆b与料斗2铰连。料斗从A端取料,送至B端。料斗作了一个翻转运动,即把物料卸进出料槽。
6)圆弧打磨机构。图3-18所示是由三个平行四边形曲柄机构组成的复合机构,可用于圆弧打磨的设备。图3-18a所示是基本结构,d是共用机架。上、下连杆b的等长延长线与连杆l铰接,l=e,a=c。当主动曲柄a转动时,连杆l的中点M及其中垂线h的端点E的运动轨迹均为圆曲线。图3-18b所示为以图析法绘制的运动轨迹图线,可见,M点的轨迹是以l为边长的等边三角形的内切圆。
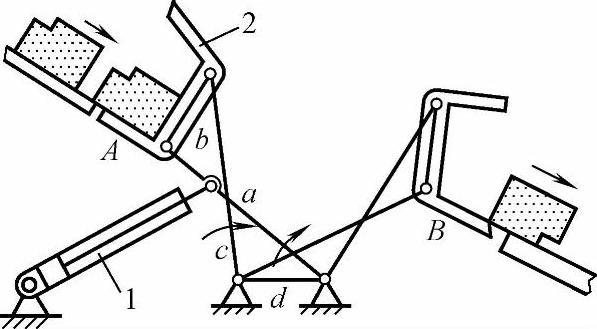
图3-17 平行四边形机构应用-物料翻转传递机构
1—摆动气缸 2—料斗
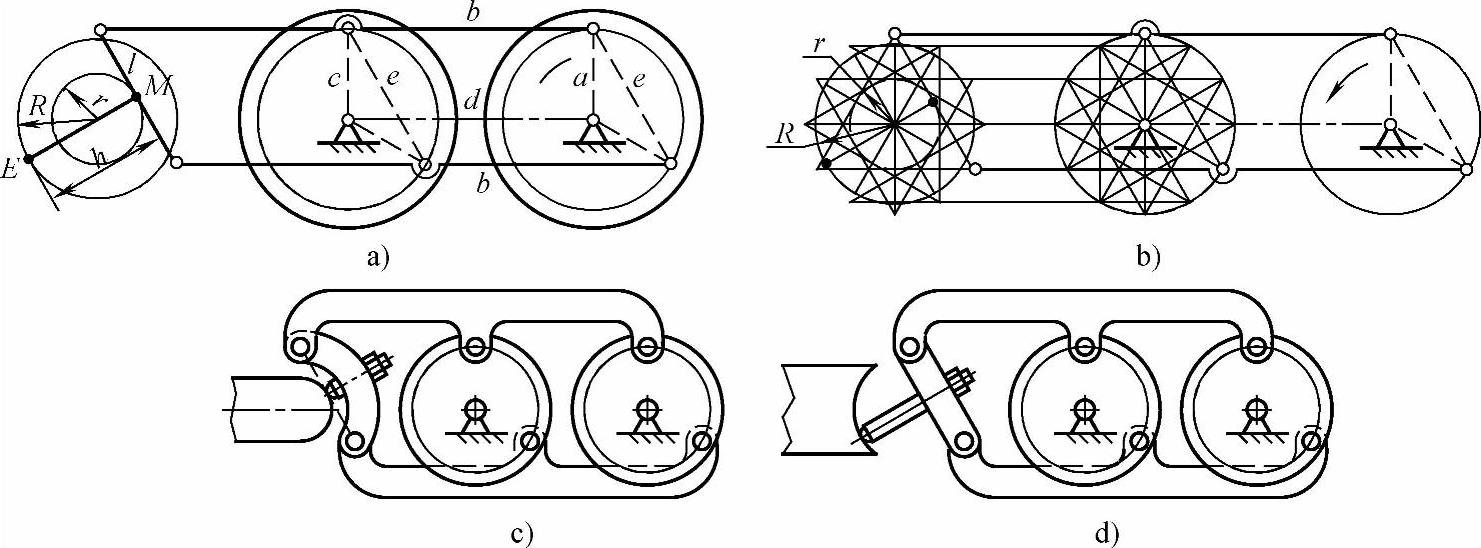
图3-18 平行四边形机构应用-圆弧打磨机构
两轨迹圆的半径r和R的关系为
这种机构可用于如图3-18c、d所示的外圆和内圆边缘打磨的设备。当h≤r时,端点E的轨迹圆小于或等于M点的轨迹圆,适用于凸圆弧打磨;当h>r时,端点E的轨迹圆大于M点的轨迹圆,适用于凹圆弧打磨。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。