



(1)双曲柄四杆机构(见图2-26)
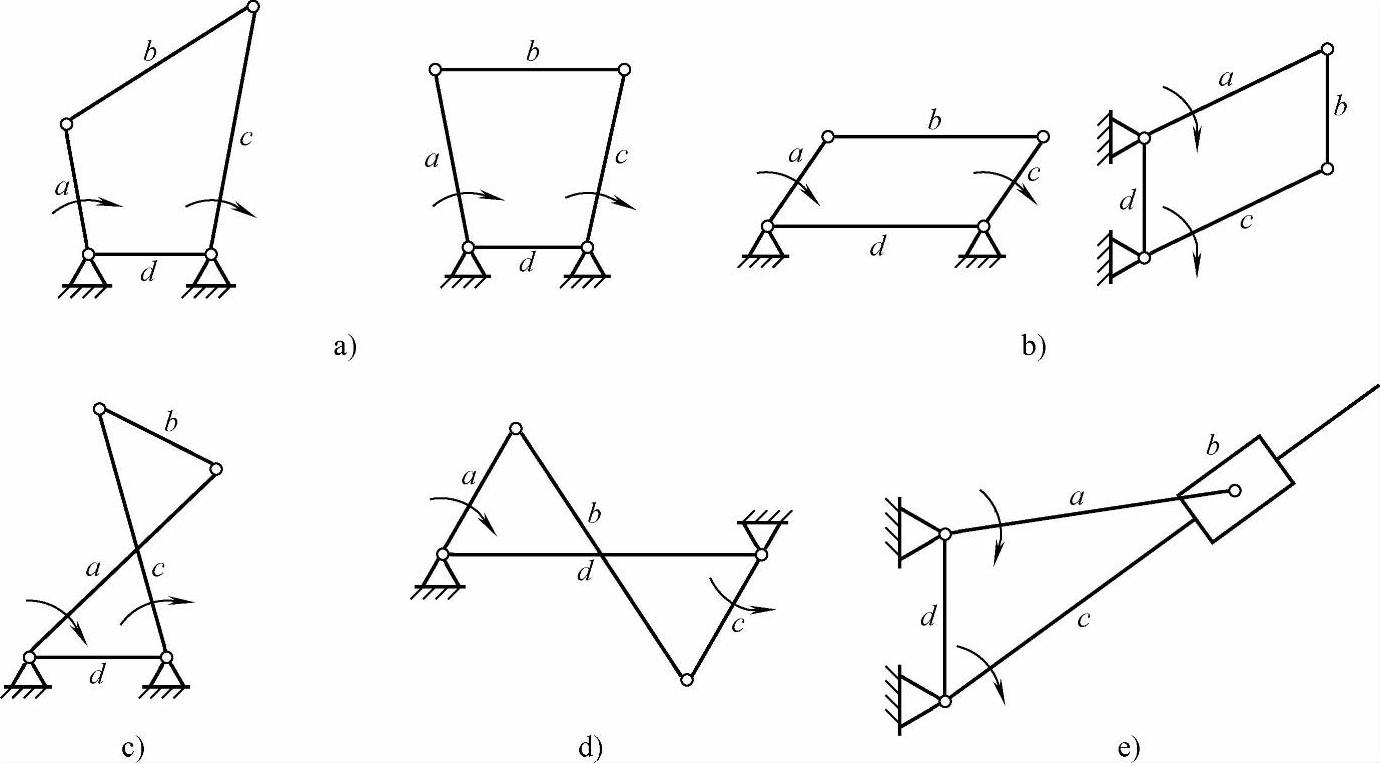
图2-26 双曲柄四杆机构
a)c+d<a+b,d最短 b)a=c,b=d c)a=c,b=d d)a=c,b=d e)a>d
双曲柄四杆机构是实现“回转→回转”运动变换的较简单的机构。四构件的长度要符合如下条件之一:
1)最短杆长度+最长杆长度<其他两杆长度之和,最短杆固定为机架。
2)最短杆长度+最长杆长度=其他两杆长度之和,任一杆可作为机架。
图2-26所示机构的区别为:图2-26a所示机构的任一曲柄作等速转动时,另一曲柄作变速转动;图2-26b所示机构的任一曲柄作等速转动时,另一曲柄的转向和转速与之相同,也称同向转动的平行四边形机构;图2-26c所示机构的任一曲柄作等速转动时,另一曲柄作同向变速转动,也称同向转动的反平行四边形双曲柄机构;图2-26d所示机构的任一曲柄作等速转动时,另一曲柄作反向变速转动,也称反向转动的反平行四边形双曲柄机构;图2-26e所示为转动导杆机构,当曲柄a作等速转动时,导杆c作变速转动,反之亦然。
在图2-26e所示的机构中,无论是构件a或是构件c作主动件,均无死点。滑块对导杆的作用力的方向总是垂直于导杆,所以其传动角恒等于90°。可见,此种机构具有良好的力传递性能。
(2)摩擦传动机构(见图2-27)
图2-27a所示为自动调压摩擦传动机构。介轮装在摆动板上,靠自重(也可加适当的弹簧压力)压在从动轮上。为确保机构正常工作,要选合适的角度α和β,宜取(α+β)/2≤arctanμ,式中μ为摩擦因数。
图2-27b所示为具有弹性圈的摩擦传动机构。弹性圈紧套于主动轮1和平衡轮3的外面,从动轮2居中。弹性圈的作用是使传动平稳,自动调压,减少轴的弯曲变形。
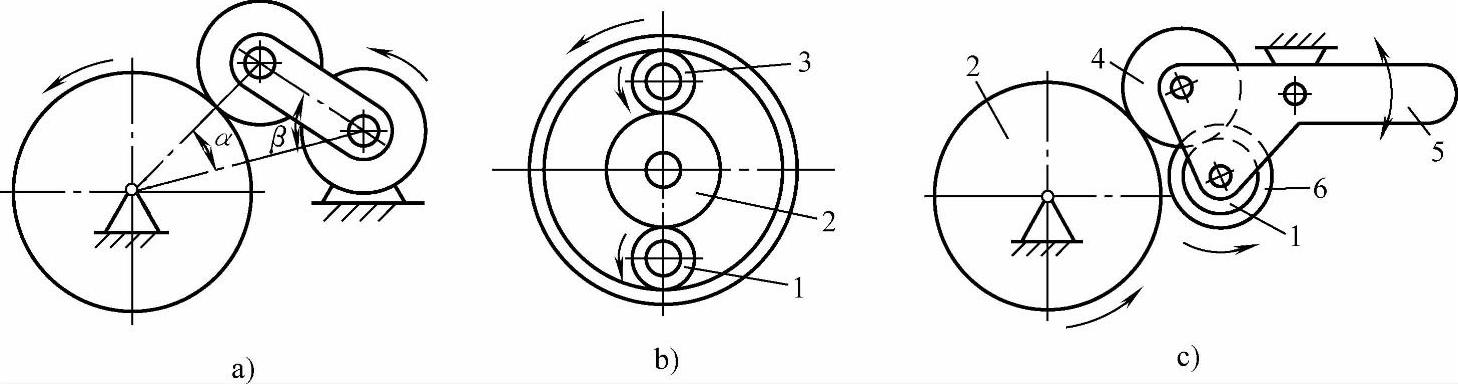
图2-27 摩擦传动机构
1、6—主动轮 2—从动轮 3—平衡轮 4—介轮 5—摆动板
图2-27c所示为具有正反转、快速返回的传动机构。主动轮1和6固连于带电动机的主动轴上,介轮4与主动轮1保持传动接触,2为从动轮,齿轮1、6、4及电动机同装在摆动板5上。图示位置为慢速传动路线1→4→2;拨动摆动板5,使主动轮6直接与从动轮2啮合,这时机构采用快速返回传动路线6→2。(https://www.xing528.com)
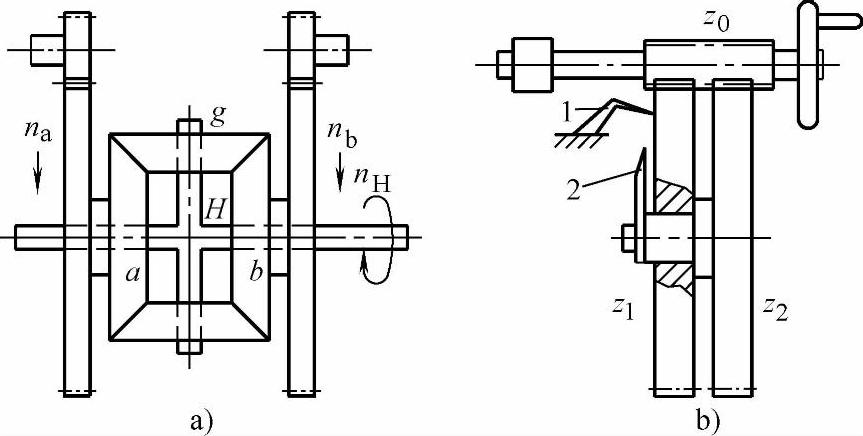
图2-28 齿轮差动传动机构
1—固定指针 2—随动指针 a、b—锥齿轮 H—行星架 g—行星锥齿轮 z0—长齿轮 z1、z2—片齿轮
(3)齿轮差动传动机构(见图2-28)
图2-28a所示为锥齿轮差动轮系。此轮系由两两对称的输入锥齿轮a和b及行星锥齿轮g组成,行星架H为输出转轴。由机械原理可知,此轮系的输入与输出转速关系为:nH=(na+nb)/2,式中,nH、na和nb分别为行星架H、锥齿轮a和b的转速。可见,这是一个加法机构。
图2-28b所示为圆柱齿轮差动机构。长齿轮z0与两个片齿轮z1和z2同时啮合。z1动配合于z2的轴上。设齿数差为z1-z2=1,当z1转一周时,z2则多转了1/z1角度,相当于z1每转一周进一位。若在z1上装一个刻度盘,则可利用固定指针1和随动指针2指示出它们之间的差动关系。此机构可用于计数装置和绕线机的读数装置。注意,齿轮z1或z2需作修正。
(4)单向传动机构(见图2-29)
这种机构常见的有棘轮棘爪式和钢球(或滚柱)斜楔式两类:
1)图2-29a所示为棘轮棘爪式单向传动机构,装有棘爪的主动轮1与从动棘轮2的转轴采用滑动配合。
2)图2-29b所示为钢球斜楔式单向传动机构,主动轮1与带楔槽并装有钢球的从动转盘3采用滑动配合。
当上述两种机构的主动轮按箭头方向转动时,可带动从动件转动。反之打滑,有反向保护作用。
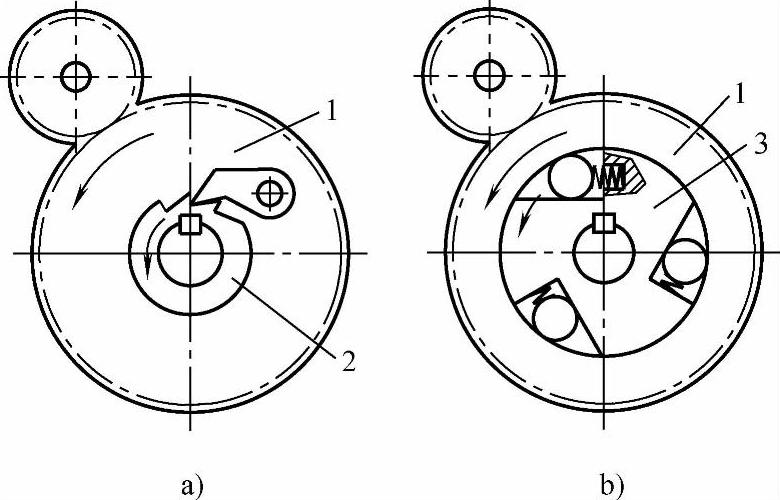
图2-29 单向传动机构
1—主动轮 2—从动棘轮 3—从动转盘
a)棘轮棘爪式 b)钢球斜楔式
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。