



(1)齿轮齿条机构(见图2-16)
图2-16a所示的齿轮齿条机构中,齿轮作正反转运动,齿条连同工作台作往复直线运动。图2-16b所示是缺齿齿轮-齿条传动机构,齿轮作单向连续转动,当转到缺齿范围时,齿条连同工作台在弹簧拉力的作用下快速返回。
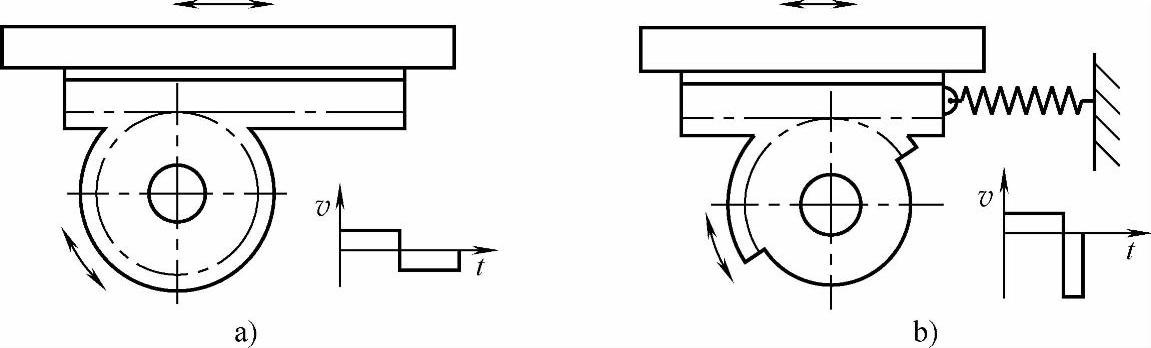
图2-16 齿轮齿条机构
(2)变速齿轮-齿条机构(见图2-17)
图2-17中,齿轮1和内齿轮2固连在一起,为主动件。变换齿轮3装在摆杆5上,由电磁铁6控制其速度的变换。
图2-17所示位置为快速返回状态,此时变换齿轮3与内齿轮2啮合,通过齿轮4驱动工作台向左快速返回。当工作台碰到行程开关,接通电磁铁6并拉动摆杆时,变换齿轮3摆向齿轮1,然后,工作台向右作慢速的匀速运动。

图2-17 变速齿轮-齿条机构
1、4—齿轮 2—内齿 轮3—变换齿轮 5—摆杆 6—电磁铁
(3)行星轮系回转-直线变换机构(见图2-18)
图2-18a所示为外啮合行星轮系机构,齿轮1固定不动,转臂4绕O点转动,齿轮2、3与转臂铰接,齿轮3的节圆直径d等于齿轮1的节圆半径R,与转臂4等长的摆杆5与齿轮3固连。当转臂4绕O转动时,摆杆5的端点M在齿轮1的直径方向上作往复直线运动。图2-18b所示为内啮合行星轮系机构,齿轮2的节圆直径d也等于固定齿轮1的节圆半径R。齿轮2在转臂4的驱动下作行星转动时,其节圆上任一点M的运动轨迹是通过齿轮1直径往复运动的直线。若在齿轮2的M点位置上装一传动销6,则可带动外接构件作往复直线运动。
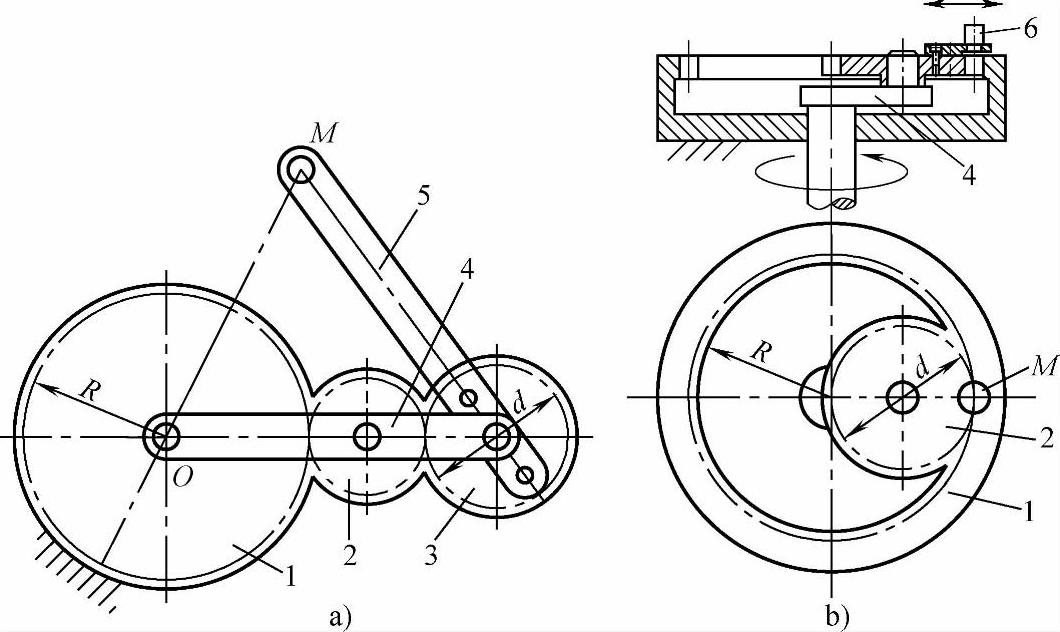
图2-18 行星轮系回转-直线变换机构
1、2、3—齿轮 4—转臂 5—摆杆 6—传动销
(4)不完全齿轮-齿条运动变换机构(见图2-19)
图2-19所示是由不完全齿轮3、上齿条1和下齿条2组成的运动变换机构。上、下齿条装在可往复运动的框架4的内侧。当齿轮按顺时针转动,与上齿条1啮合时,框架向右移动;与下齿条2啮合时,框架向左移动。不完全齿轮3连续转动,框架4作左右往复直线运动。
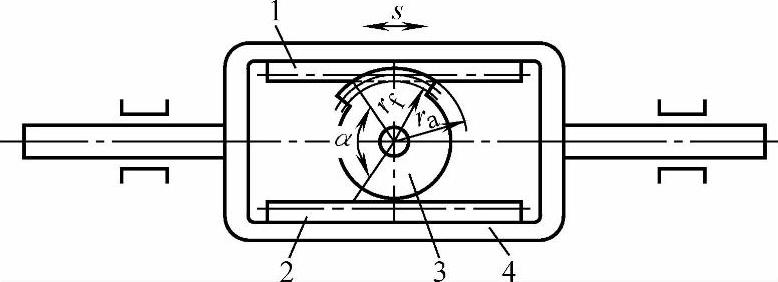
图2-19 不完全齿轮-齿条运动变换机构
1—上齿条 2—下齿条 3—不完全齿轮 4—框架
齿轮有轮齿部分的夹角不能大于α,否则会发生干涉而卡死。α角要符合如下条件:
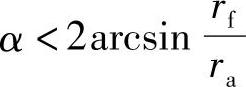
式中 ra齿轮齿顶圆半径;
rf齿轮齿根圆半径。
对于标准渐开线齿轮的正常齿,齿轮齿顶圆半径ra和齿根圆半径rf分别为
ra=(z+2)m/2
rf=(z-2.5)m/2
式中 z齿轮完全齿数;
m齿轮模数。
框架4的运动行程s=zmα/2。
这种机构的两端可以设计成有适当的停歇时间。因啮合时有冲击,所以不宜用于高速传动。
(5)齿轮-摇杆滑块机构(见图2-20)
如图2-20所示,三个齿轮装在同一摇杆2上,主动轮1连续转动,通过齿轮和摇杆机构的特殊运动变换,驱动滑块3作直线往复运动。滑块的行程因摇杆机构的摆动而得到增大,其速度特性为终端减速,快速回程。(https://www.xing528.com)
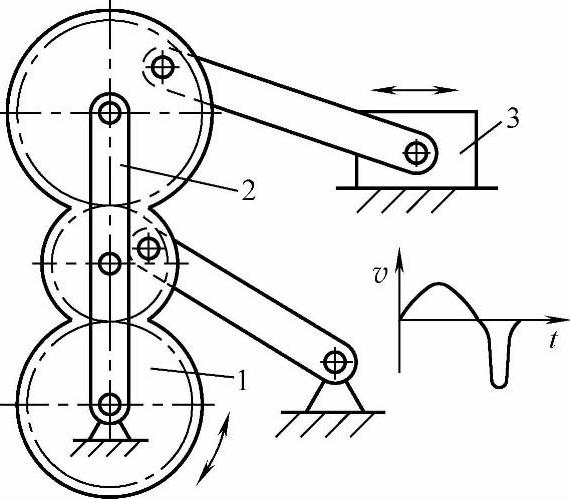
图2-20 齿轮-摇杆滑块机构
1—主动轮 2—摇杆 3—滑块
(6)曲柄圆盘-导杆(滑块)机构(导槽传动式)(见图2-21)
图2-21a所示为曲柄圆盘-导杆机构,图2-21b所示为曲柄圆盘-滑块机构。两者的共同点是:曲柄圆盘的传动销通过往复平移运动的导槽向导杆或滑块传递动力。
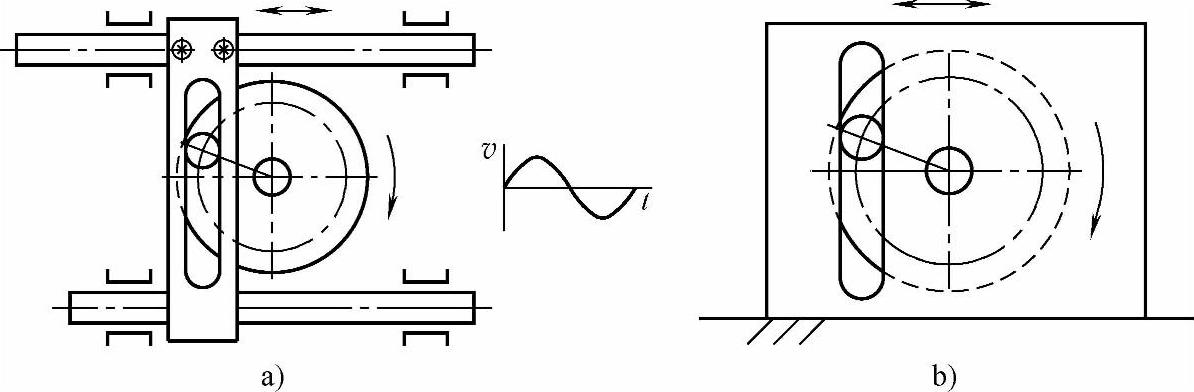
图2-21 曲柄圆盘-导杆(滑块)机构
曲柄圆盘连续转动,导杆(滑块)按余弦规律作直线往复运动,所以这种机构又称余弦机构,速度特性为两端减速型。
(7)曲柄圆盘-摇杆滑块机构(见图2-22)
图2-22所示机构的共同点是:曲柄圆盘的传动销通过摆动连杆向滑块或导杆传递动力。图2-22a、c所示为两种曲柄圆盘-滑块机构;图2-22b所示为曲柄圆盘-双向导杆机构;图2-22c所示是用肘节式连杆推动的双向导杆机构;图2-22d所示是加入摆杆推动导杆作上下运动的机构。
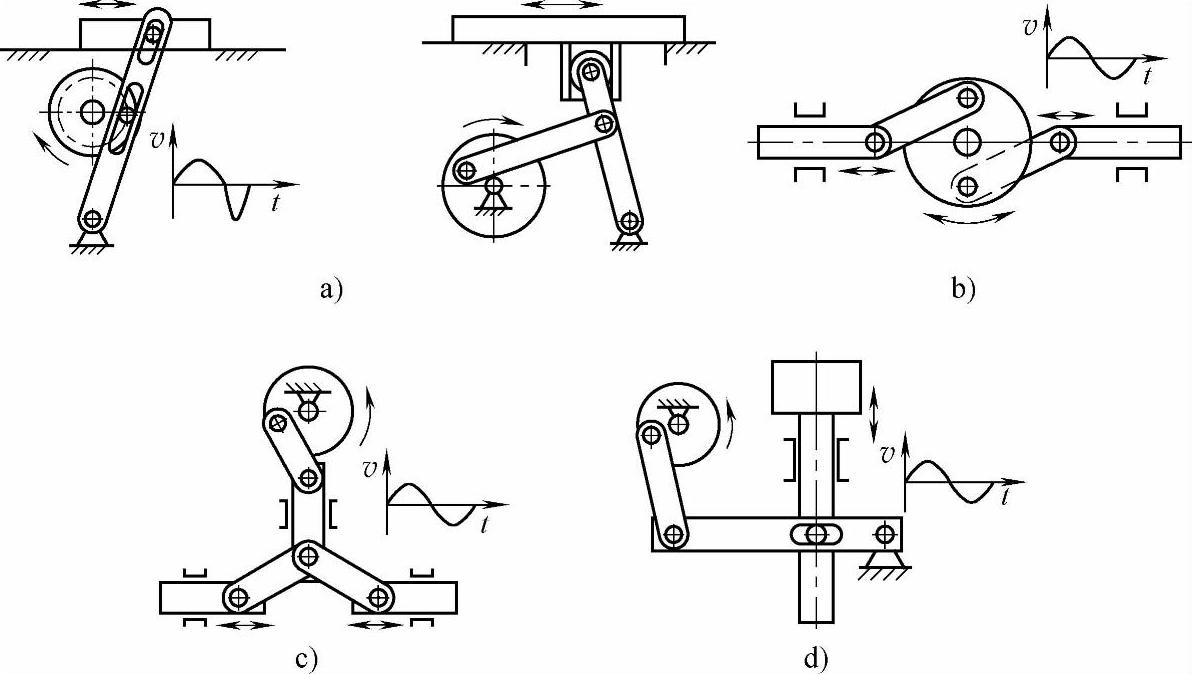
图2-22 曲柄圆盘-摇杆滑块机构
(8)盘形凸轮机构(见图2-23)
此种机构的凸轮连续转动,从动杆作上下直线往复运动。从动杆运动的速度特性依凸轮廓线形状的不同而异。下面列出五种不同廓线凸轮的特性:
1)偏心圆盘凸轮(见图2-23a),速度按余弦规律变化,速度特性为两端减速型。
2)有半个圆周的卵形凸轮(见图2-23b),速度按等速-变速交替变化。
3)阿基米德螺线凸轮(见图2-23c),速度特性为等速型。
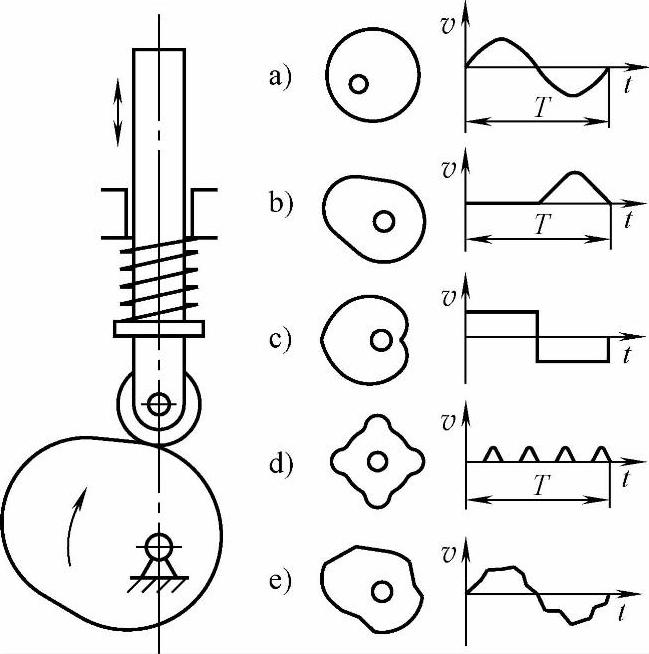
图2-23 盘形凸轮机构
4)由若干个凸台组成的凸轮(见图2-23d),速度特性是间歇跃动式或间歇变速式。
5)不规则廓线凸轮(见图2-23e),按特定设计的运动规律动作。
(9)偏心轮(扇形轮)-滑块(导杆)机构(见图2-24)
图2-24所示机构的共同点是偏心轮或扇形轮连续转动,滑块(导杆)作直线往复运动。运动的速度特性:图2-24a~f所示都是两端减速型,按余弦规律变化;图2-24g、h所示按近似余弦规律变化。

图2-24 偏心轮(扇形轮)-滑块(导杆)机构
各机构的简介如下:图2-24a所示用肘节式连杆推动滑块,用拉簧作力封闭;图2-24b所示用摆杆推动导杆,用导杆和工作台自重作力封闭;图2-24c所示用杠杆推动导杆,用导杆和工作台自重作力封闭;图2-24d所示用导杆和杠杆推动滑块,用拉簧作力封闭,调节D点的上下位置,可改变工作台的行程;图2-24e所示为偏心轮与连杆上端孔滑动配合连接,可用于小冲床的冲头传动机构;图2-24f所示为扇形轮-滑块机构,扇形轮在滑块内的矩形孔中连续转动,推动滑块沿导路上下作间歇运动,它可用于小冲床冲头的传动机构,设计时,应注意扇形轮与孔壁不能发生干涉;图2-24g所示为偏心轮-闭合导杆机构;图2-24h所示为等宽三角凸轮-闭合导杆机构,棱边半径r=a+b,从动导杆行程s=a-b。
(10)摩擦传动机构(见图2-25)
图2-25a所示为端面压紧摩擦传动机构。两个压盘(一个与转轴固连,一个与转轴用移动键相连)通过压簧的作用力夹紧于可移动轴的凸棱上。转动压盘,即可带动此轴移动。可用于轻载微调机构。
图2-25b所示为摩擦轮传送带(线)状物料机构,它利用摩擦轮压紧带(线)料并作直线传输运动。
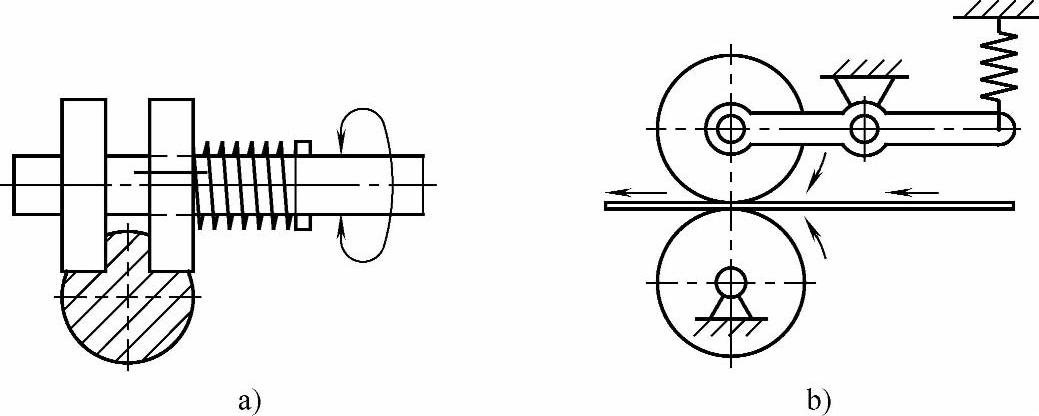
图2-25 摩擦传动机构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。