



练习文件路径:上机操作\结果文件\Ch07\7-4.CATPart
演示视频路径:视频\Ch07\螺钉接合.avi
01 在【标准】工具栏中单击【打开】按钮,在弹出的【选择文件】对话框中选择“7-4.CATPart”文件。单击【打开】按钮,打开本例源文件模型,如图7-31所示。
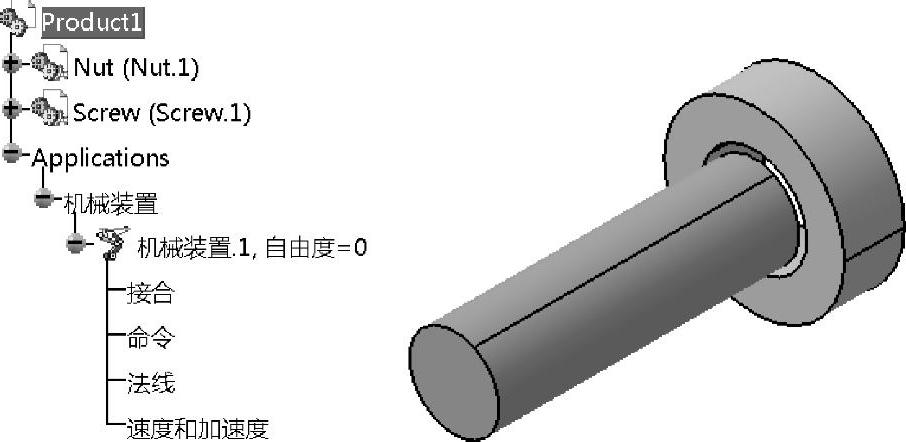
图7-31 打开模型文件
02 单击【DMU运动机构】工具栏中的【螺钉接合】按钮 ,弹出【创建接合:螺钉】对话框,如图7-32所示。
,弹出【创建接合:螺钉】对话框,如图7-32所示。
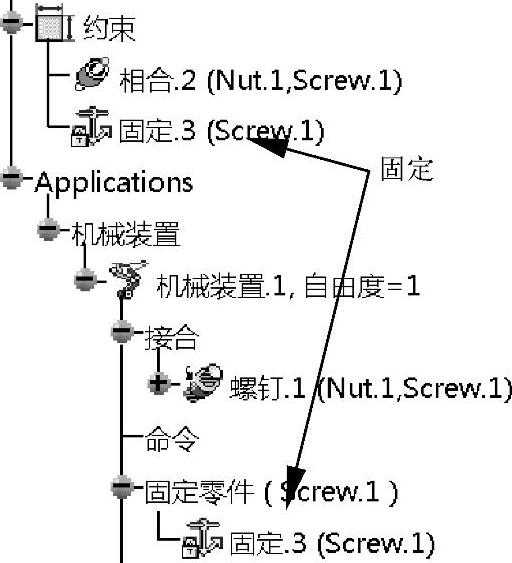
03 在图形区分别选中几何模型中的轴线1和轴线2。单击【确定】按钮,完成螺钉接合创建。在【接合】节点下增加了“螺钉.1”,在【约束】节点下增加了“相合.2”,如图7-33所示。
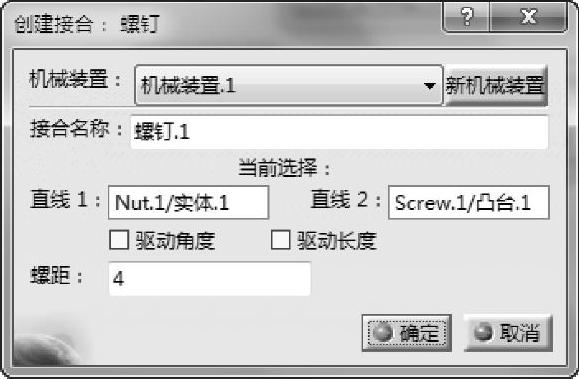
图7-32 【创建接合:螺钉】对话框
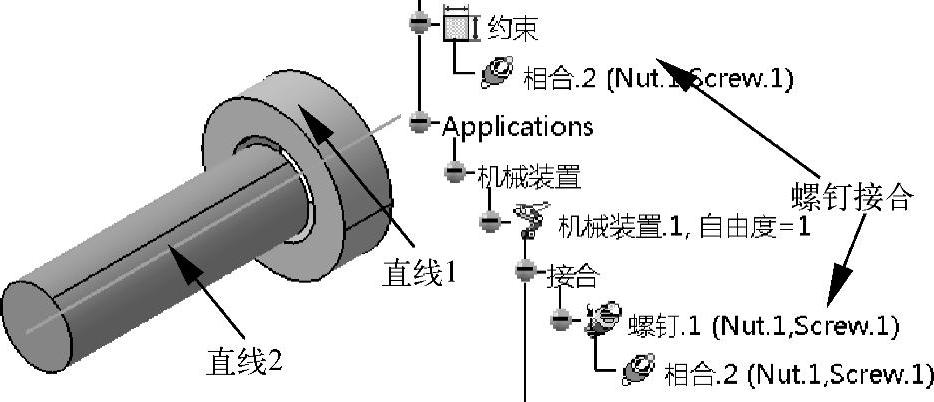
图7-33 创建接合
04 设置固定零件。单击【DMU运动机构】工具栏中的【固定零件】按钮 ,弹出【新固定零件】对话框,如图7-34所示。在图形区或特征树上选择Screw零件为固定件,在图形区选中零件处显示固定符号,同时在【固定零件】和【约束】节点增加固定选项,如图7-35所示。
,弹出【新固定零件】对话框,如图7-34所示。在图形区或特征树上选择Screw零件为固定件,在图形区选中零件处显示固定符号,同时在【固定零件】和【约束】节点增加固定选项,如图7-35所示。
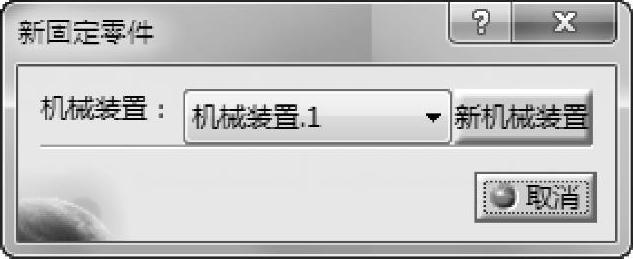
图7-34 【新固定零件】对话框
 (https://www.xing528.com)
(https://www.xing528.com)
图7-35 固定
05 施加驱动命令。在特征树上双击【螺钉.1】节点,显示【编辑接合:螺钉.1(螺钉)】对话框,勾选【驱动角度】和【驱动长度】复选框,在图形区显示移动和旋转方向箭头,如图7-36所示。
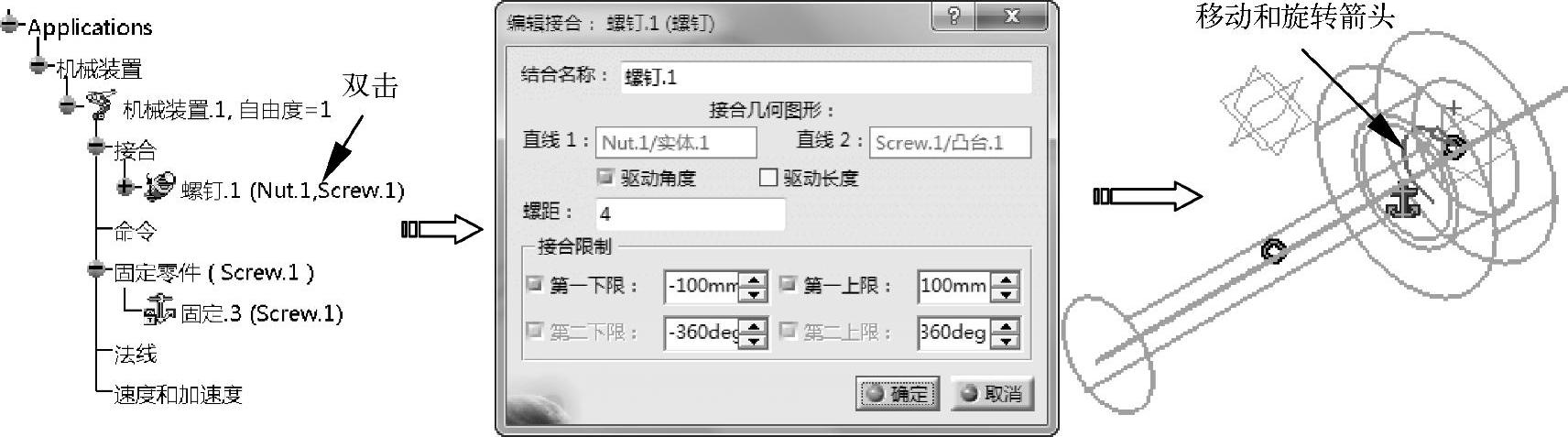
图7-36 施加驱动命令
技巧点拨:
如果图中移动方向与所需旋转方向相反,可单击图中箭头更改运动方向。
06 单击【确定】按钮,弹出【信息】对话框,如图7-37所示。单击【确定】按钮,此时特征树中显示“自由度=0”,并在【命令】节点下增加了“命令.1”,如图7-38所示。
图7-37 【信息】对话框
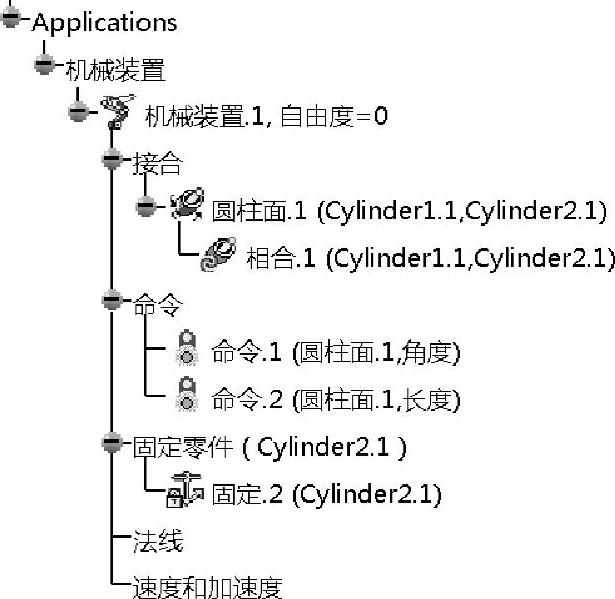
图7-38 增加【命令】节点
07 运动模拟。单击【DMU运动机构】工具栏中的【使用命令进行模拟】按钮 ,弹出【运动模拟】对话框,用鼠标拖动滚动条,可观察产品的直线旋转运动。
,弹出【运动模拟】对话框,用鼠标拖动滚动条,可观察产品的直线旋转运动。
5.球面接合
【球面接合】是指两个构件之间仅被一个公共点或一个公共球面约束的多自由度运动副,可实现多方向的摆动与转动,又称为球铰,如球形万向节。创建时需要指定两条相合的点,对于高仿真模型来讲,即两零部件上相互配合的球孔与球头的球心。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。