



在设计领域存在以下两个基本公理:
1.独立公理:保持功能需求(FRS)的独立性
这意味着:理想情况下,每一个特定设计参数的改变应只影响一项功能,然而,实际上这是难以做到的,会出现许多耦合情况。然而了解这一公理,可以帮助人们识别耦合,并实施解耦设计。
至于FRS究竟系独立或相关,全视所选的DPS而定。但公理化设计所希望的是独立。如非独立,则有一套应对方式。独立公理阐明了功能要求与设计参数之间的关系。当有两个或两个以上的功能要求时,设计方案必须满足每一个功能要求,而且不影响其他的功能要求。这就要求选择设计参数时,既要满足功能要求,又要保持功能要求的相互独立。分析功能要求与对应的设计参数之间的关系,可以判断功能要求之间是否相互独立。在这里,应区别功能独立与物理部件独立,要求功能独立而并不是要求物理部件独立。换句话说,一个物理部件可能满足多个功能需求。还应指出,违反独立公理的设计,是不可能改进的。满足独立公理的设计不必进行传统意义上的优化。这时,最优化通常意味着在竞争的FRs中进行选择。
图3-3 易拉饮料罐
【案例3-1】易拉饮料罐设计
如图3-3所示易拉饮料罐,其功能是装一定容量的碳酸饮料。它需要满足多少FRS?它有多少DPS?有多少物理部件?
解:据铝制罐厂的专家说,易拉罐有12个FRS,如承受轴向和径向的压力;抗从一定高度摔下的中等冲击;允许彼此在顶上摞起来;易拉开;用最少的铝;在表明上可印刷等。
为满足独立公理,必须至少有12个DPS(有关定理见后续说明),如:罐体的厚度;罐底的曲率;罐头顶部和底部直径的减小(减少材料);开片的波浪形(增加刚度);开片的形状(易于摸到开片)等。但是,是否需要12个物理部件来对应满足12个DPS呢?显然,可以将这些功能集成起来,实际上用三个部件即:罐体、盖子和开片。
设计区域的映射关系也可用下列设计方程来表达:
{FR}=(A){DP} (3-1)
{DP}=(B){PV} (3-2)
式中 {FR}——设计目标(功能要求)的特征向量;
(A)——用以表征产品设计的设计矩阵;
{DP}——设计参数的特征向量;
(B)——用以表征过程设计的设计矩阵;
{PV}——过程参数的特征向量。
按式(3-1),对于有三个FRS和DPS的设计,其设计矩阵为
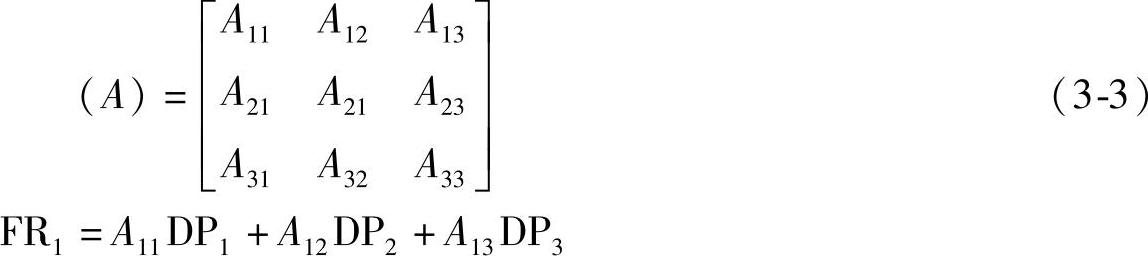
由此可得 

一般 
对于线性设计,Aij是常数。对于非线性设计,Aij是DPS的函数。设计矩阵有两个特殊情况:对角线矩阵和三角形矩阵。在对角线矩阵中,除i=j外所有Aij=0,,即
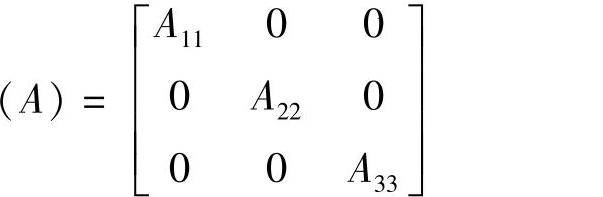
当(A)是对角线矩阵时,每一个FR可以用一个DP来满足,因而属于无耦合设计,是最理想的。
在三角形矩阵中,有两种情况:上或下三角形元素等于零,即
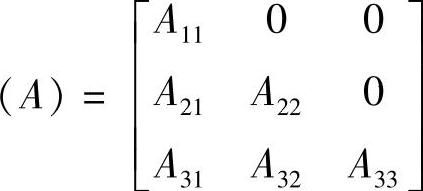
此为上三角形元素等于零。当(A)是三角形矩阵时,则可通过适当的顺序确定DPS来保证FRS独立性,从而实现解耦设计。这种情况可称为准耦合设计。
其他矩阵形式属于耦合设计,不满足独立公理。由此,为了满足独立公理,设计矩阵必须是对角线形或三角形的。
(1)理想设计 可以证明,当DPs的数目等于FRs的数目而且FRs始终保持彼此独立时,不会发生耦合设计,就是一个理想设计。(https://www.xing528.com)
(2)冗余设计 同样可以证明,当DPs的数目大于FPs的数目时,是一个冗余设计或者是一个耦合设计。
(3)耦合设计 同样可以证明,当DPs的数目小于FPs的数目时,总是得到一个耦合设计。
对于出现耦合设计的任何情况,都需要进行解耦设计。根据独立公理还可以证明,无耦合设计始终优于耦合设计。因此,必然存在一个无耦合设计或解耦设计,具有一个比耦合设计更小的信息含量。
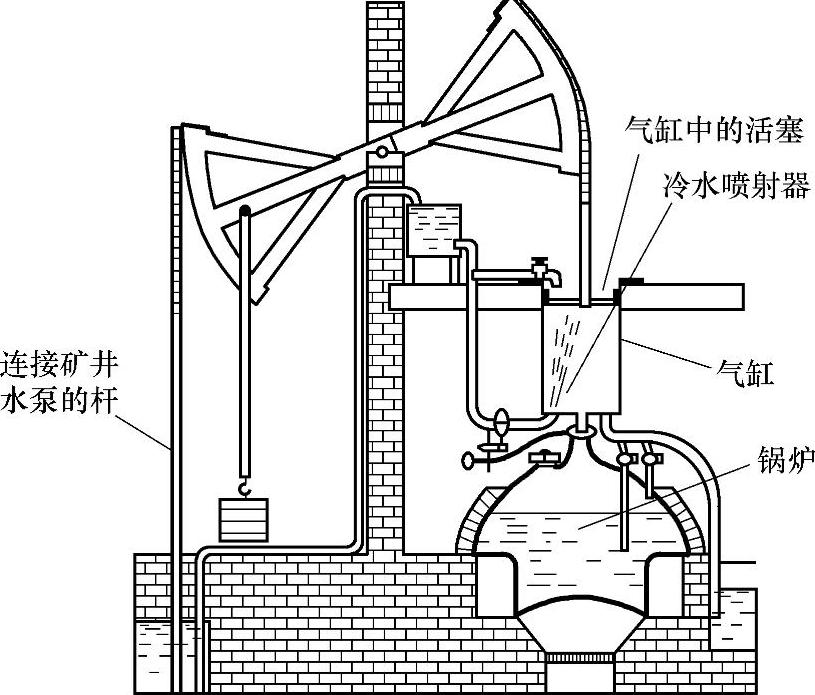
图3-4 牛顿蒸汽机简图
【案例3-2】蒸汽机的解耦设计
图3-4所示为牛顿蒸汽机简图,其工作原理为:蒸汽喷射到气缸里推动活塞向上运动,然后靠向气缸里喷射冷水时蒸汽冷凝,产生真空将活塞向下拉,从而形成往复运动,由活塞驱动连接矿井水泵的连杆把水从矿井里抽出去。由于锅炉、阀和蒸汽都会影响到蒸汽冷凝和活塞运动,且冷水喷雾会影响到活塞向上运动,蒸汽必须加热气缸,而冷水要冷却气缸和活塞。因此,这是一个不满足独立公理的耦合设计。后来,瓦特采用了分离的冷凝器,使之变为无耦合,又将单冲程改为二冲程,提高了效率。
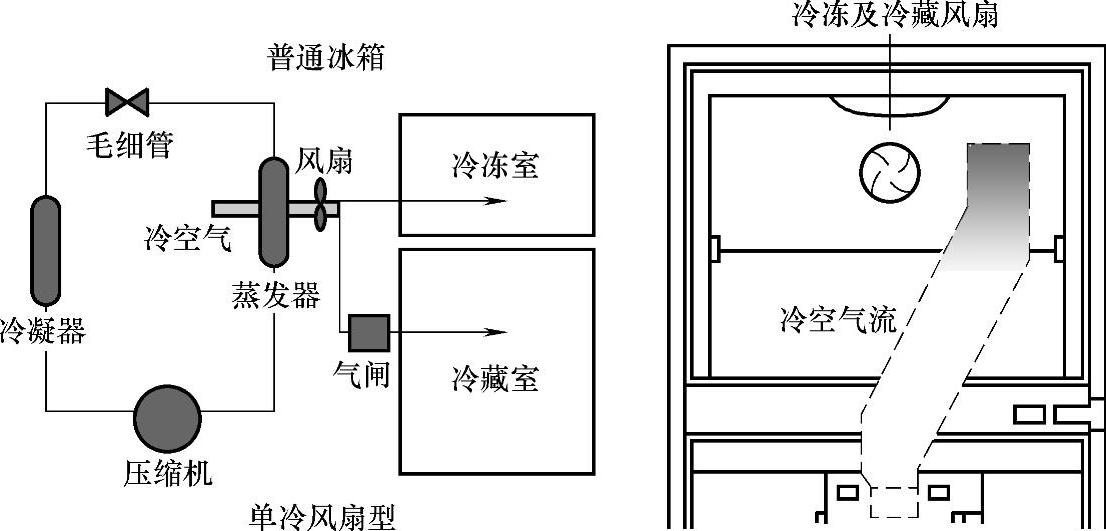
图3-5 普通冰箱
【案例3-3】冰箱设计
在图3-5和图3-6上列示了两种不同的冰箱设计方案。众所周知,冰箱分有冷冻和冷藏两个功能需求。前一个方案,冷冻和冷藏共享一个风扇。因此,冷藏区的温度不能相对冷冻区独立控制。这是一个耦合设计。后一个改进方案,采用了两个风扇,当冷藏区的温度高于设定值时,只需要增加的风扇工作即可,即使在压缩机停止工作期间冷凝器也可冷却进入冷藏区的空气。可以看出,这是一个满足独立公理的更好的设计。
2.信息公理:力求设计信息含量最少
该公理的核心是:最简单的设计,成功的可能性最大,是最好的选择。
一个给定Fi的信息含量Ii是由满足Fi的概率Pi定义的,即

如果在有m个FRS的情况下,整个系统的信息含量就将上式中Ii换成Isys即可。
当所有的FRS不都是独立时,如出现耦合设计的情况下,Pm则等于满足所有的FRS的条件概率的连乘积。
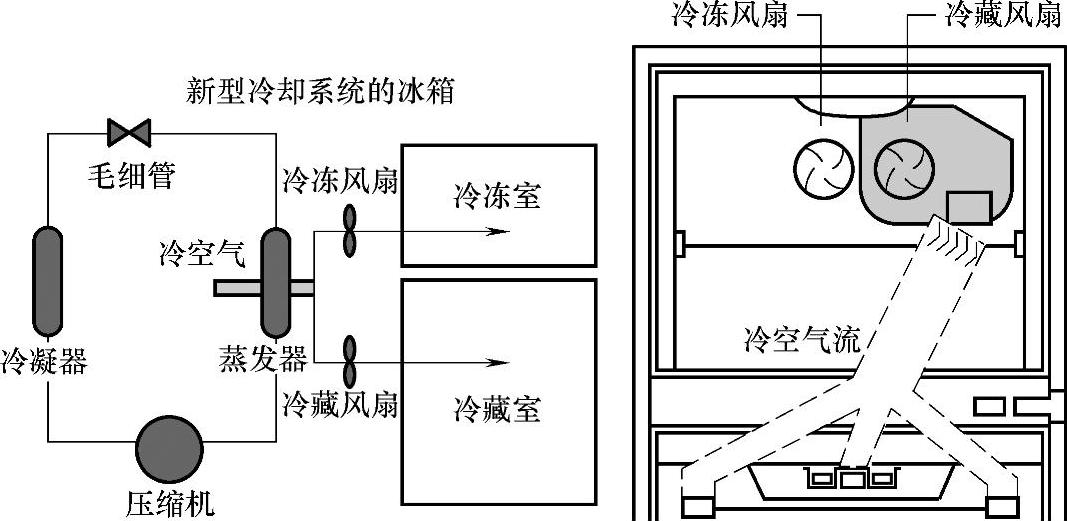
图3-6 新型冰箱
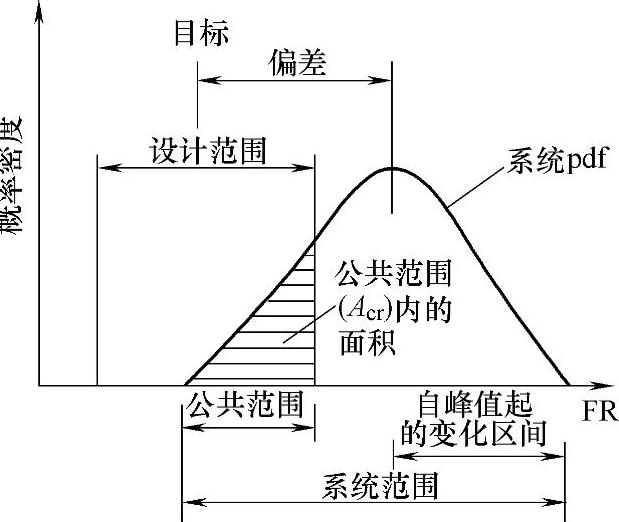
图3-7 功能需求的设计范围、系统范围和相应的概率密度函数
信息公理说的是,具有最小I的设计是最佳设计。因为这时为达到设计目标只需要最小的信息量。当所有的概率都为1.0时,信息量为零。反之,当概率之中的一个或几个等于零时,所需信息量就是无穷大。也就是说,如果概率很小,就必须提供更多的信息来满足功能需求FRS。当成功概率低的时候,设计被称为复杂的;即满足FRS所需的信息含量高。这种情况发生在一个产品的FRS(或一个过程的DPS)的公差小、精度要求高的时候。当部件数目增加时,某些零件不符合规定需要的可能性也就增加,故也可能出现这种情况。在一定意义上可以说,信息含量是复杂性的定量度量,因为复杂系统可能需要更多信息来实现系统功能。如果信息含量低,物理上的庞大的系统不一定复杂。反之,如果信息含量高,小系统也可能复杂。因此,复杂性与FRS的设计范围紧密相关,设计范围越小,满足FRS就越困难。成功概率可以由计算得到。图3-7提供了FR的设计范围、可以满足FR的系统范围和相应的概率密度函数(pdf)。设计范围和系统范围重叠的部分,就是能满足FR的区域,称为公共范围。其内的面积,就是设计成功的概率。
在所指定的FR上(带有公差范围),其对应的DP会有一定的概率可以满足这个FR。当达到这个带有一定公差范围FR的概率越高时,表示越有可能满足用户要求。因此,它是受到偏爱的,这符合信息公理。
信息公理表明在所有满足独立性公理的设计中,信息含量最少的设计是最佳设计,它是对设计方案进行评价的重要原则。根据信息公理的要求,在设计中应尽量简化设计工作,减少设计中各种因素的影响,以减少设计中产生功能耦合的可能性。由此可见,这两个公理是判断设计优劣的有力工具。
【案例3-4】定长切杆
问:若将杆A切到长度为(1+0.000001)m和杆B切到(1+0.1)m,哪一个成功的概率较高?如杆长从1m增加到30m,成功概率又将如何变化?
解:这取决于所用的切割设备。但对于有经验的工程师来说,切到高精度的会比较难,即切杆B比切杆A的成功概率高。
图3-8为手锯切杆的设计范围和系统pdf,系统范围取决于设计目标及其偏差,杆B的偏差较大,可使系统范围完全在设计范围内,因此,其成功概率为1。而杆A的切割精度要求极高,是手锯无法达到的,其成功概率为零。若杆长增加到30m则超出系统范围,其成功概率也为零。
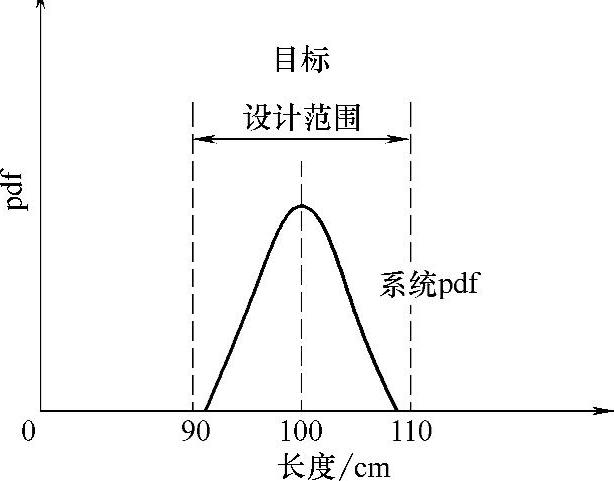
图3-8 手锯切杆的设计范围和系统pdf
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。