



简易机械手的工作示意图,如图5-43所示,其运动示意图如图5-44所示。
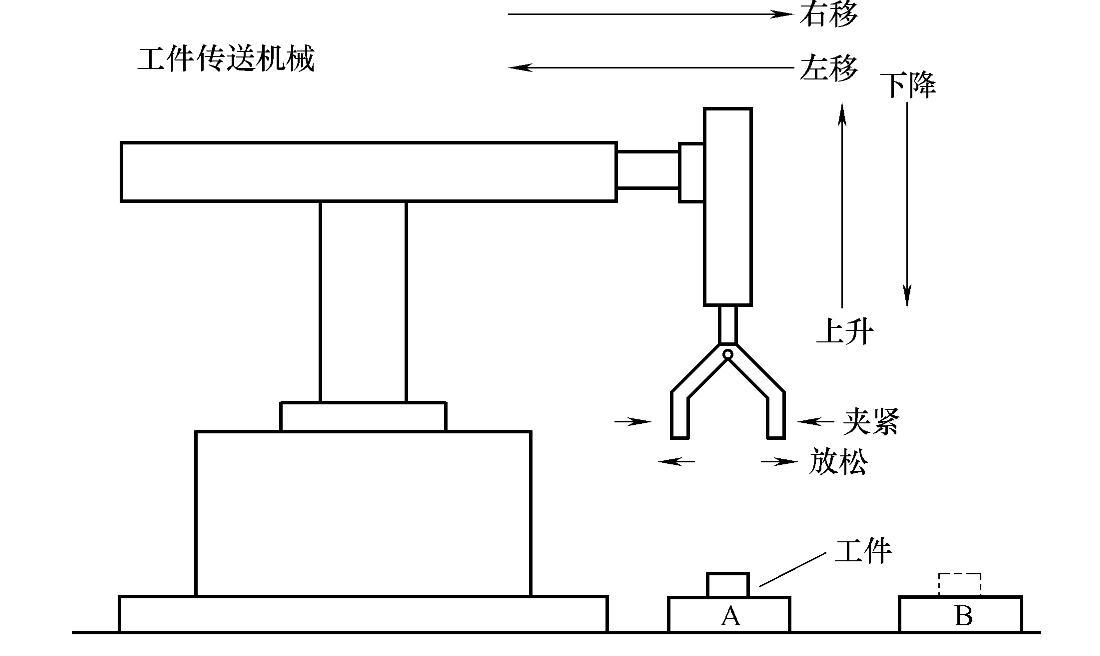
图5-43 简易机械手工作示意图
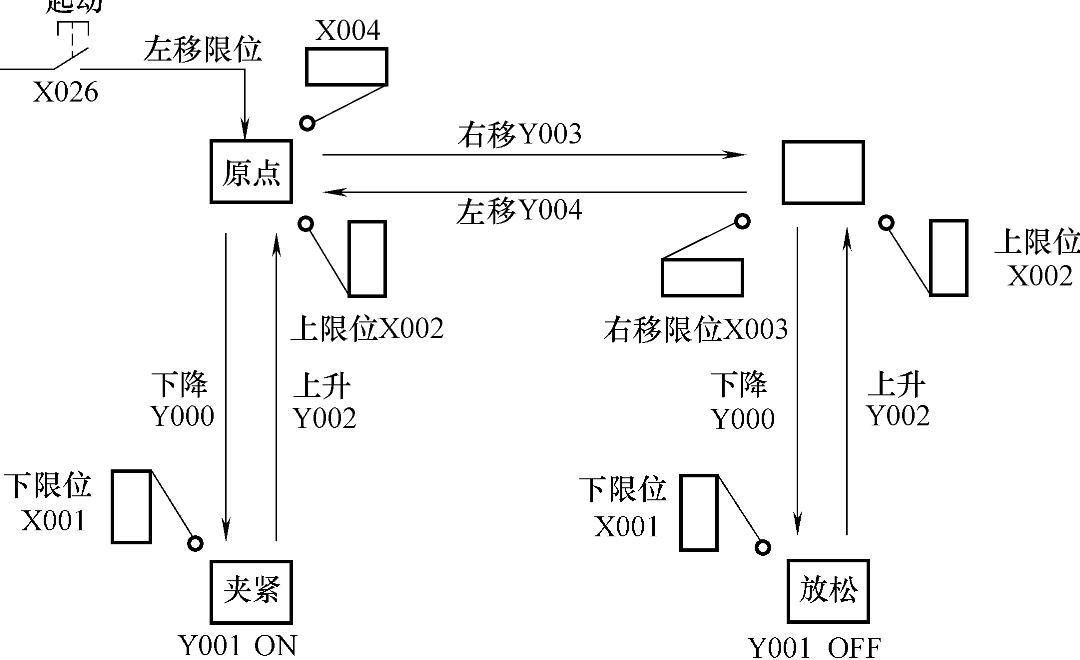
图5-44 简易机械手运动示意图
机械手将工件从A点向B点传送。机械手的上升、下降与左移、右移都是由双线圈两位电磁阀驱动气缸来实现的。抓手对工件的松夹是由一个单线圈两位电磁阀驱动气缸完成的,只有在电磁阀通电时抓手才能夹紧。该机械手工作原点在左上方,按下降、夹紧、上升、右移、下降、松开、上升、左移的顺序依次运动。它有手动、单步、一个周期和连续工作(自动)四种操作方式。
简易机械手的操作面板如图5-45所示。工作方式选择开关分四挡与四种方式对应,上升、下降、左移、右移、放松、夹紧几个步序一目了然。
下面就操作面板上标明的几种工作方式说明一下:
手动方式:是指用各自的按钮使各个负载单独接通或断开。
回原点:按下此按钮,机械手自动回到原点。
单步运行:按动一次起动按钮,前进一个工步。
单周期运行(半自动):在原点位置按动起动按钮,自动运行一遍后回到原点停止。
若在中途按动停止按钮,则停止运行;再按起动按钮,从断点处继续运行,回到原点处自动停止。
连续运行(全自动):在原点位置按动起动按钮,连续反复运行。若在中途按动停止按钮,则运行到原点后停止。
面板上的起动和急停按钮与PLC运行程序无关,这两个按钮用来接通和断开PLC外部负载的电源。

图5-45 简易机械手操作面板
机械手顺控程序编写如下:
1.初始化程序
FX系列PLC的状态初始化指令IST的功能指令编号为FNC60,它与STL指令一起使用,专门用来设置有多种工作方式的控制系统的初始状态和设置有关的特殊辅助继电器的状态,可以大大简化复杂的顺序控制程序的设计。IST指令只能使用一次,它应放在程序开始的地方,被它控制的STL电路应放在它的后面。
该系统的初始化程序如图5-46中的左图上两行所示,用来设置初始状态和原点位置条件。IST指令中的S20和S27用来指定在自动操作中用到的最小和最大状态继电器的元件号,IST中的源操作数可取X、Y和M,图中IST指令的源操作数X020用来指定与工作方式有关的输入继电器的首元件,它实际上指定从X020开始的8个输入继电器,这8个输入继电器的意义见表5-6。
表5-6 输入继电器功能对照表

X020~X024中同时只能有一个处于接通状态,必须使用选择开关,以保证这5个输入不可能同时为ON。
IST指令的执行条件满足时,初始状态继电器S0~S2和下列特殊辅助继电器被自动指定的功能见表5-7,以后即使IST指令的执行条件变为OFF,这些元件的功能仍保持不变。
表5-7 特殊辅助继电器、状态继电器功能对照表(https://www.xing528.com)

如果改变了当前选择的工作方式,在“回原点方式”标志M8043变为ON之前,所有的输出继电器将变为OFF。
2.手动方式程序
手动方式程序如图5-46左边第3行所示,S0为手动方式的初始状态,手动方式的夹紧、放松、上升、下降、左移、右移是由相应的按钮来完成的。
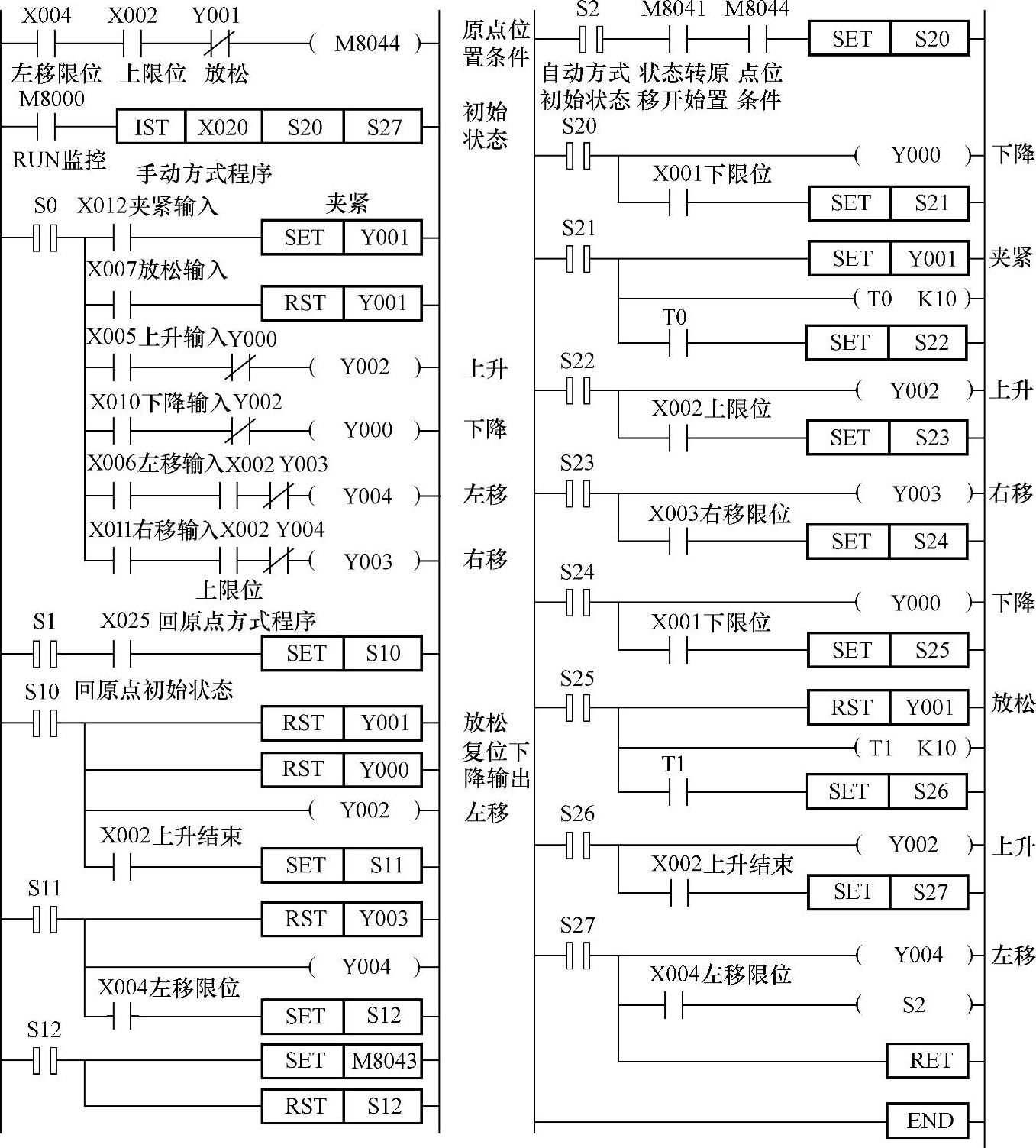
图5-46 简易机械控制系统梯形图
3.原点方式程序
回原点方式的功能图如图5-47所示,S1是回原点的初始状态。自动返回原点结束后,M8043(回原点完成)置ON。返回原点的顺序功能图中的步应使用S10~S19。
4.自动方式程序
自动方式程序的顺序功能图如图5-48所示。特殊辅助继电器M8041(转换起动)和M8044(原点位置条件)是从自动程序的初始步S2转换到下一步S20的转换条件。M8041和M8044都是在初始化程序中设定的,在程序运行中不再改变。使用IST指令后,系统的手动、自动、单周期、单步、连续和回原点这几种工作方式的切换是由系统程序自动完成的,但必须按照前述规定安排IST指令中指定的控制工作方式用的输入继电器X020~X027的元件号顺序。

图5-47 回原点方式顺序功能图

图5-48 自动方式顺序功能图
和简易机械手控制过程类似,下面是分拣系统控制实例。
在生产过程中,经常要对流水线上的产品进行分捡,图5-49所示为用于分捡大、小球的机械装置。它的工作顺序是向下,抓住球,向上,向右运行,向下,释放,向上和向左运行至左上点(原点)抓球和释放球的时间均为1s。
其动作顺序如下:左上为原点,机械臂下降(当碰铁压着的是大球时,限位开关SQ2断开;而压着的是小球时SQ2接通,以此可以判断是大球还是小球)。左、右移分别由Y004、Y003控制,上升、下降分别由Y002、Y000控制,将球吸住由Y001控制。

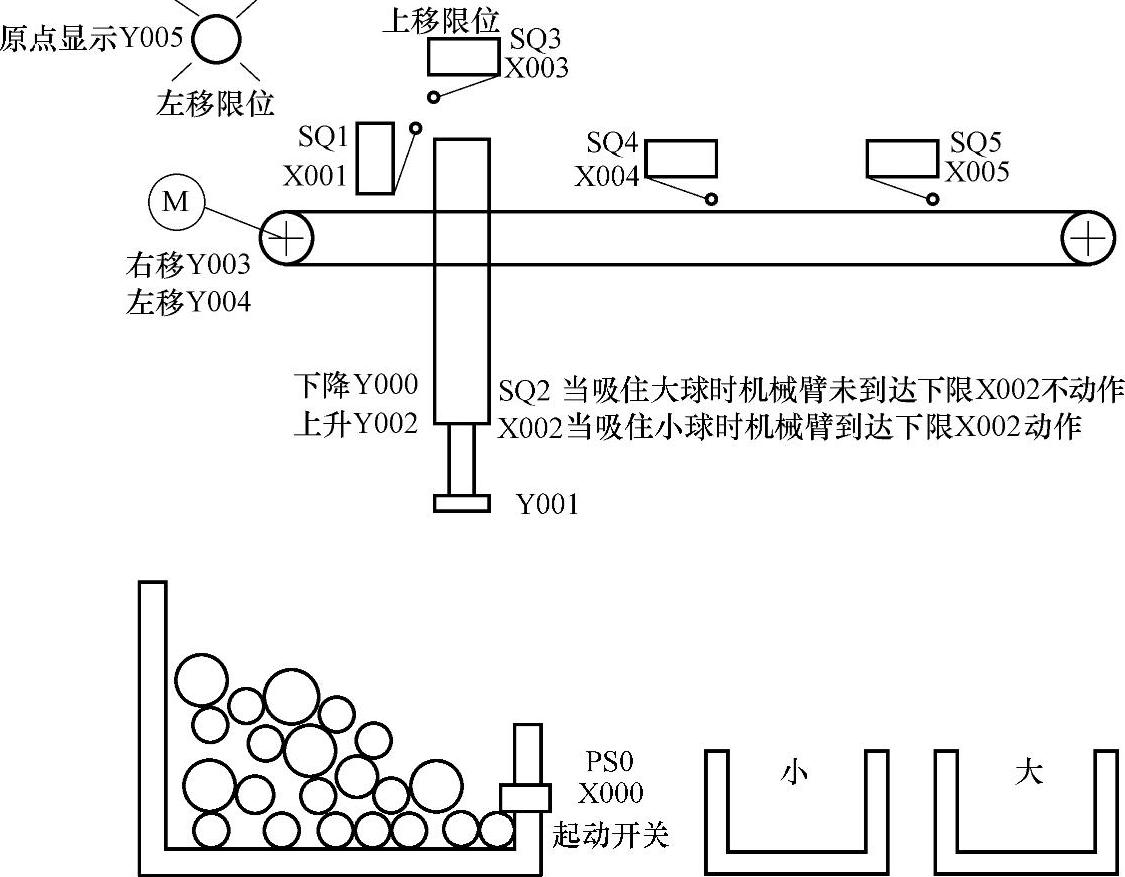
图5-49 大、小球分类选择传送装置示意图
1)系统的输入点分配:X001为左限位开关,X002为下限位开关(小球动作、大球不动作),X003为上限位开关,X004为释放小球的中间位置开关,X005是释放大球的右限位开关,X000为系统的运行开关。系统的输出点分配是:Y000是机械臂下降,Y002是机械臂上升,Y001是吸球口,Y003是机械臂右移,Y004是机械臂左移,Y005是机械臂停在原点的指示灯。其硬件连接如图5-50所示。
2)程序:根据工艺要求,该控制流程可根据SQ2的状态(即对应大、小球)有两个分支,此处应为分支点,且属于选择性分支。分支在机械臂下降之后根据SQ2的通断,分别将球吸住、上升、右行到SQ4或SQ5处下降,此处应为汇合点,然后再释放、上升、左移到原点。其状态转移图如图5-51所示。

图5-50 分捡系统硬件连接图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。