



顺序功能图通常分为以下4种类型:
1.单流程
单流程由一系列相继激活的步组成,每一步的后面仅有一个转换,每一个转换的后面只有一个步,如图5-9a所示。
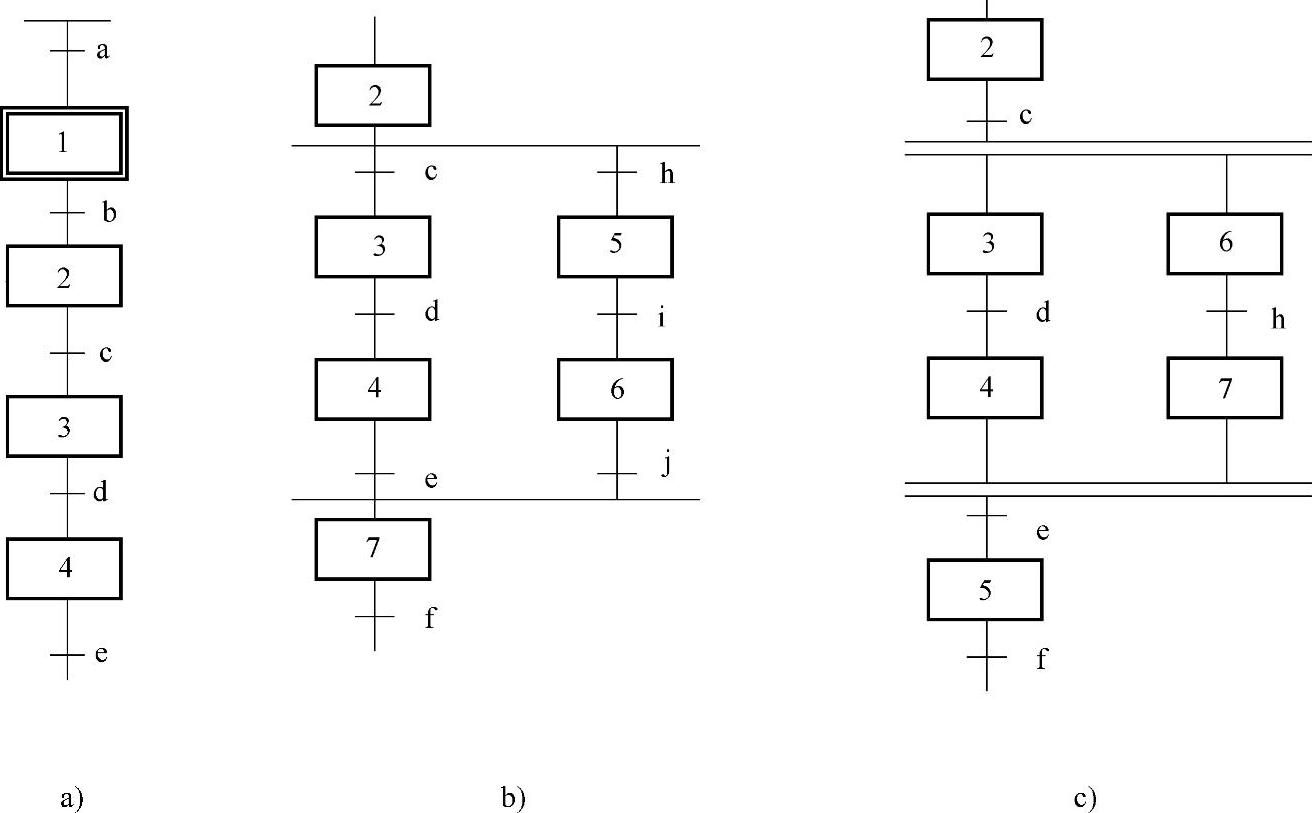
图5-9 单序列、选择序列和并行序列
图5-10所示为单流程的应用示例,即机械手将工件从A工位送到B工位的动作图和状态转移图。
单循环运行过程如下:
1)用手动操作将机械移至原点位置,然后按动启动按钮X026,动作状态从S5向S20转移,下降电磁阀的输出Y000动作,接着下限位开关X001接通。
2)动作状态S20向S21转移,下降输出Y000切断,夹钳输出Y001保持接通状态。
3)1s后定时器T0动作,转至状态S22,上升输出Y002动作,不久到达上限位,X002接通,状态转移。
4)状态S23为右行,输出Y003动作,到达右限位置,X003接通,转为S24状态。
5)转至状态S24,下降输出Y000再次动作,到达下限位置,X001立即接通,接着动作状态由S24向S25转移。
6)在S25状态,先将保持夹钳输出Y001复位,并启动定时器T1。
7)夹钳输出复位1s后状态转移到S26,上升输出Y002动作。
8)到达上限位置X002接通,动作状态向S27转移,左行输出Y004动作。一旦到达左限位置,X004接通,动作状态返回S5,成为等待再启动的状态。
2.选择性分支与汇合
所谓选择性分支就是从多个流程中选择执行一个流程,最简单地说就是前面有两条或多条路,只能选择走一条。那么选择性分支也就是这个意思,每条路都通向某一个相同的地方,而那个地方就是汇合处。例如抢答器就是这个原理,每次只有一个能抢答到。选择序列的开始称为分支(见图5-9b),转换符号只能标在水平连线之下。如果步2是活动步,并且转换条件c=1,将发生步2→步3的进展。如果步2是活动步,并且h=1,将发生步2→步5的进展。如果将选择条件h改为ch,则当c和h同时为ON时,将优先选择c对应的序列,一般只允许同时选择一个序列,即选择序列中的各序列是互相排斥的,其中的任何两个序列都不会同时执行。
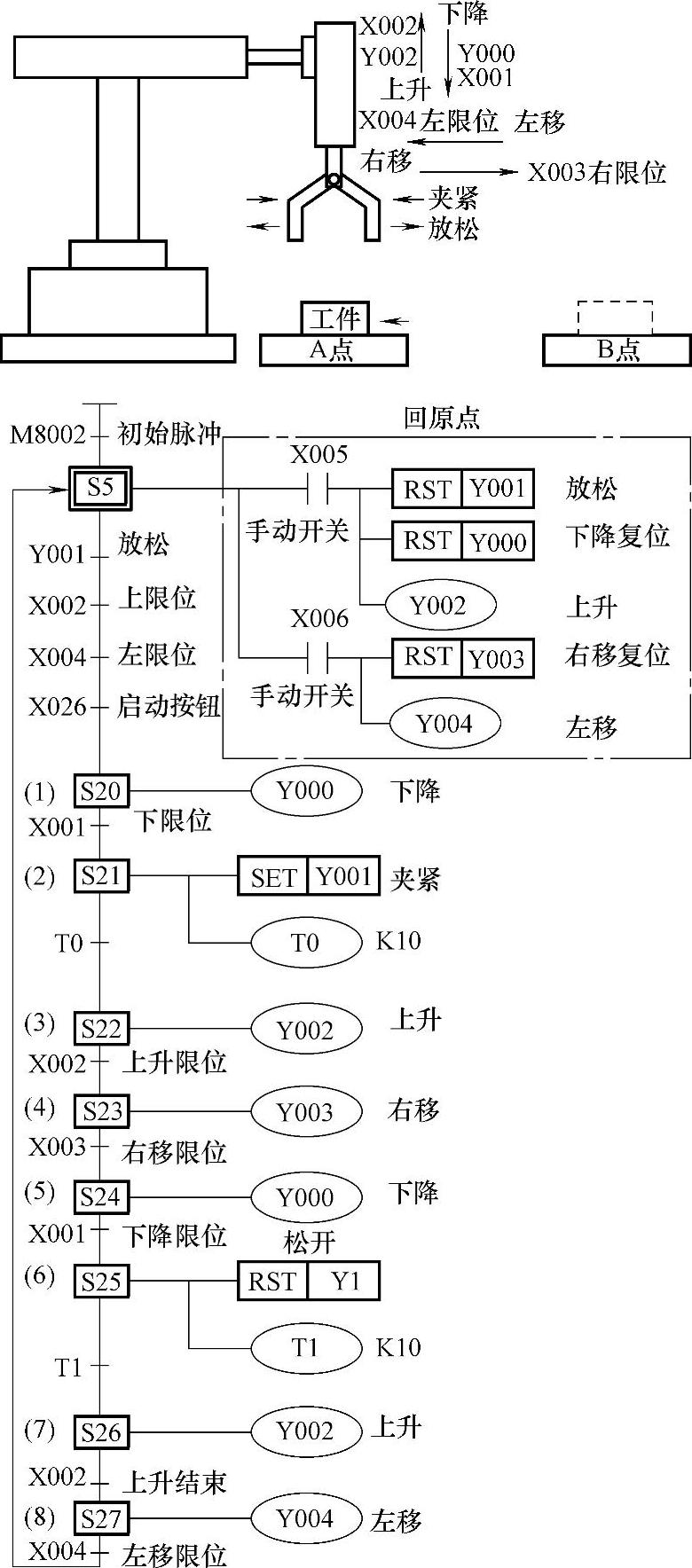
图5-10 机械手将工件从A工位送到B工位的动作图和状态转移图
选择序列的结束称为合并,几个选择序列合并到一个公共序列时,用需要重新组合的序列相同数量的转换符号和水平连线来表示,转换符号只允许标在水平连线之上。如果步4是活动步,并且转换条件e=1,将发生步4→步7的进展。如果步6是活动步,并且j=1,将发生步6→步7的进展。
图5-11所示为选择性分支与汇合状态转移图和步进梯形图。
选择性分支与汇合的状态转移图和梯形图之间的转换如下:
以图5-12为例,必须是X000、X010和X020不同时接通。例如,在S20动作时,若X000接通,则动作状态就向S21转移,S20变为不动作。因此,即使以后X010、X020动作,S31、S41也不会动作。汇合状态S50,可被S22、S32和S42中的任意一个驱动。
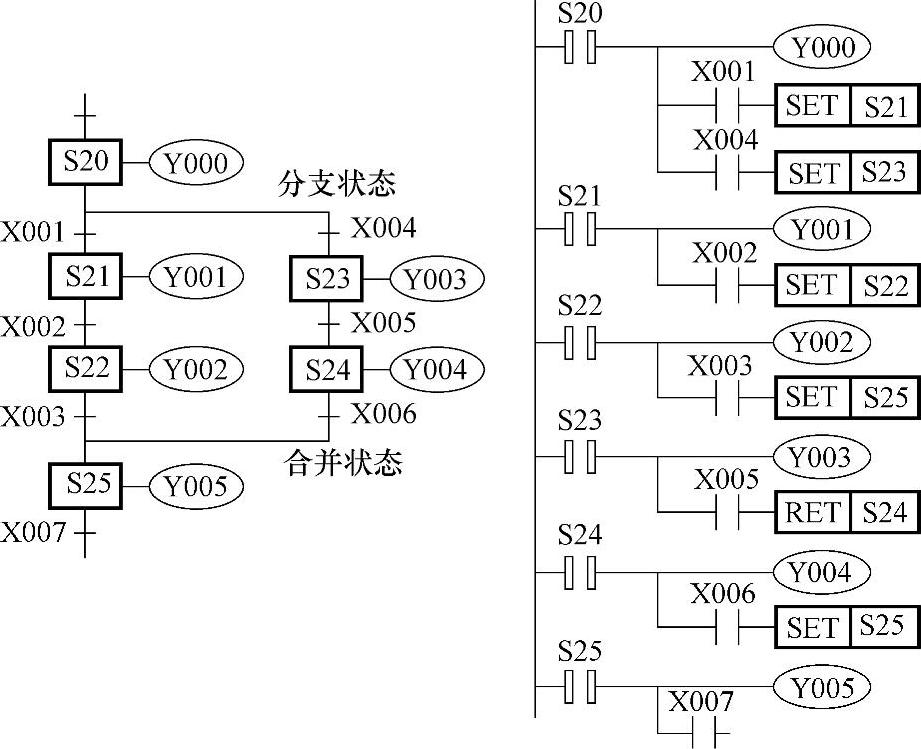
图5-11 选择性分支与汇合
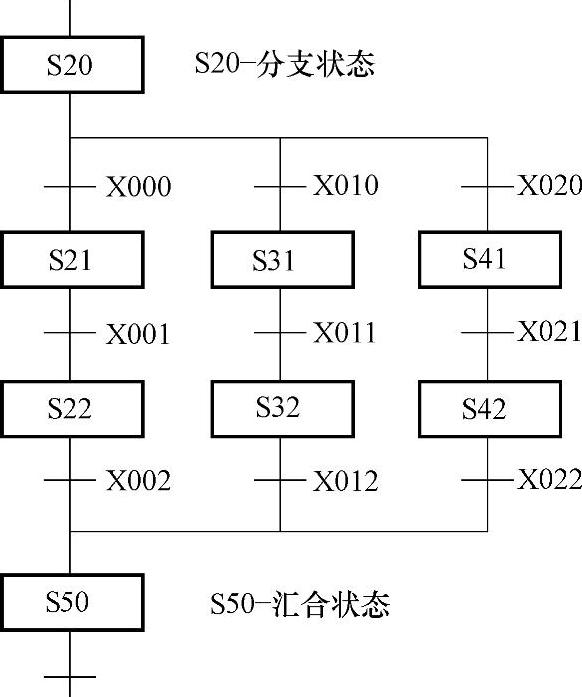
图5-12 选择性分支与汇合的状态转移图
图5-13所示为使用传送带,将大、小球分类选择传送的机械。图5-13左上方为原点,其动作顺序为下降、吸住、上升、右行、下降、释放、上升、左行。此外,机械臂下降,当电磁铁压着大球时,下限限位开关LS2断开;而当压着小球时,LS2导通。
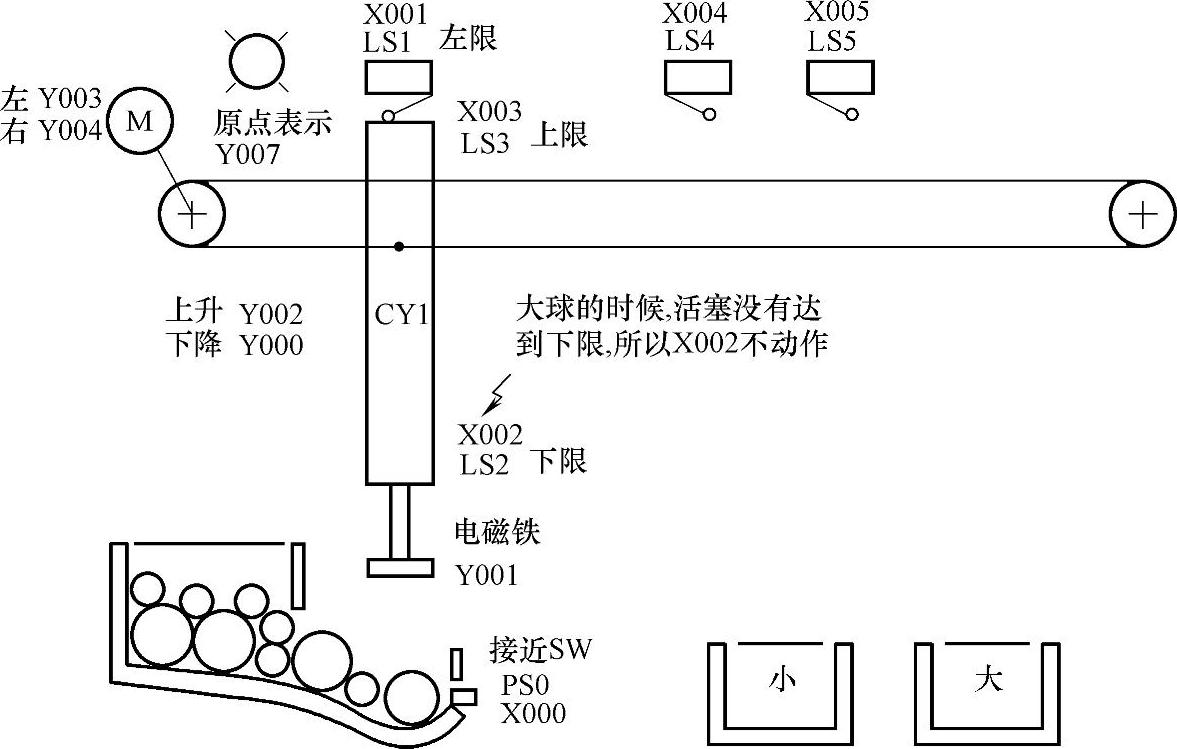
图5-13 分类选择传送机械系统示意图
像这种大小分类选择或判别合格与否的系统状态转移图,可用图5-14所示的选择性分支与汇合系统状态转移图表示。(https://www.xing528.com)
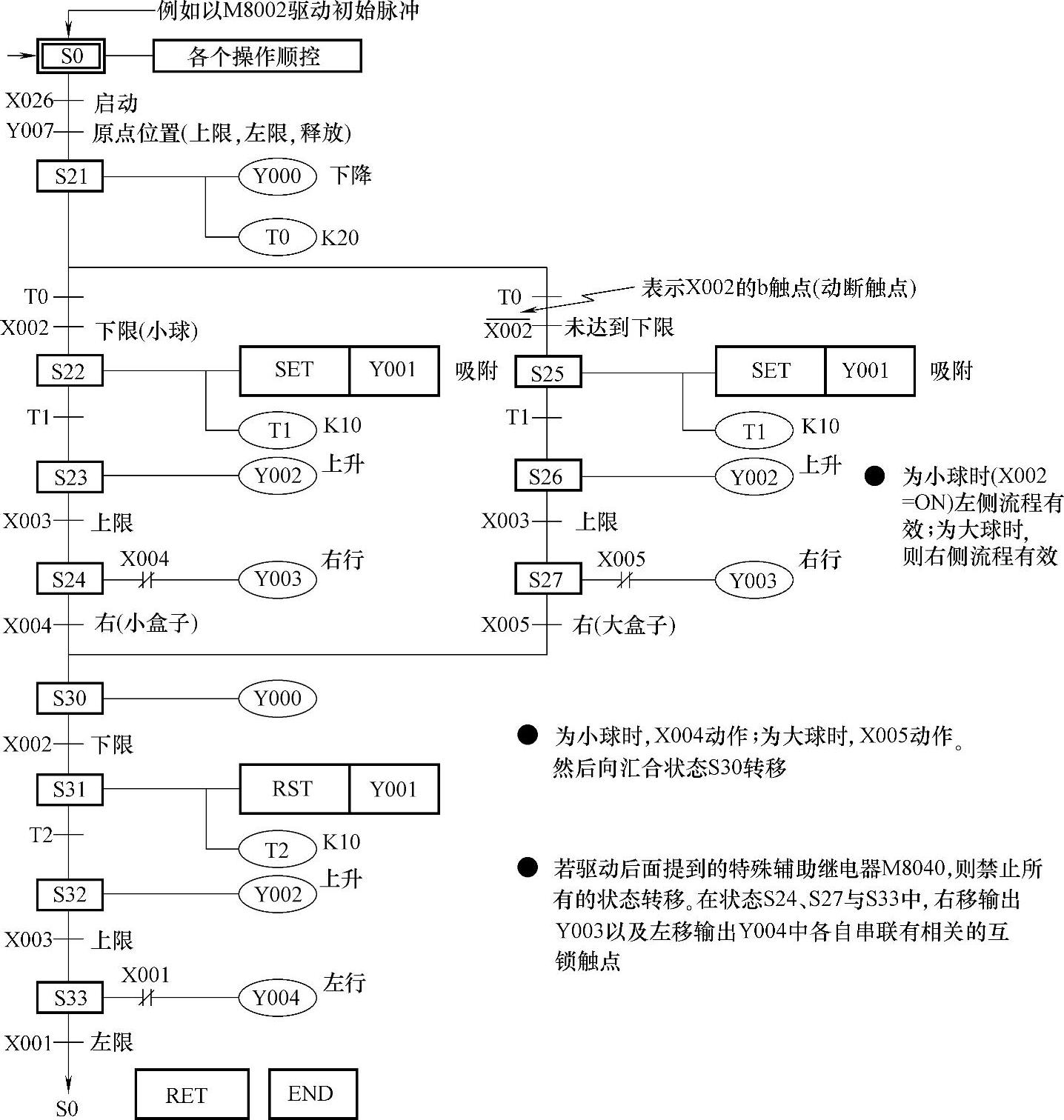
图5-14 分类选择传送系统状态转移图
3.并行性分支与汇合
多个流程全部同时执行的分支被称为并行分支。并行序列的开始称为分支(见图5-9c),当转换的实现导致几个序列同时激活时,这些序列称为并行序列。当步2是活动步,并且转换条件c=1时,则3和6这两步同时变为活动步,同时步2变为不活动步。为了强调转换的同步实现,水平连线用双线表示。步3、6被同时激活后,每个序列中活动步的进展将是独立的。在表示同步的水平双线之上,只允许有一个转换符号。并行序列用来表示系统的几个同时工作的独立部分的工作情况。
并行序列的结束称为合并,在表示同步的水平双线之下,只允许有一个转换符号。当直接连在双线上的所有前级步(步4、7)都处于活动状态,并且转换条件e=1时,才会发生步4、7到步5的进展,即步4、7同时变为不活动步,而步5变为活动步。在每一个分支点,最多允许有8条支路,每条支路的步数不受限制。
并行性分支与汇合如图5-15所示。
在S20动作时,若X000接通,则S21、S24、S27同时动作,各分支流程开始动作。当各流程动作全部结束时,若X007接通,则汇合状态S30开始动作,转移前的各状态S23、S26、S29全部变为不动作。这种汇合,有时又被称为等待汇合(先完成的流程要等所有流程动作结束后再汇合,并继续动作)。
图5-16所示为并行性分支与汇合状态转移图和步进梯形图。
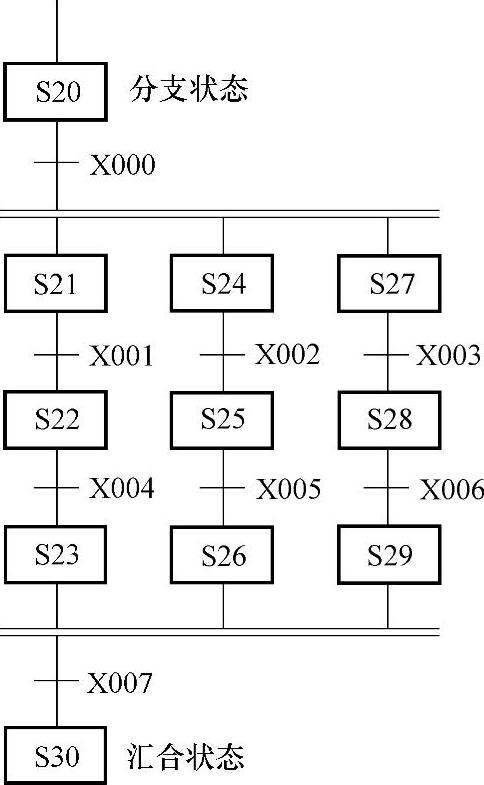
图5-15 并行性分支与汇合状态图
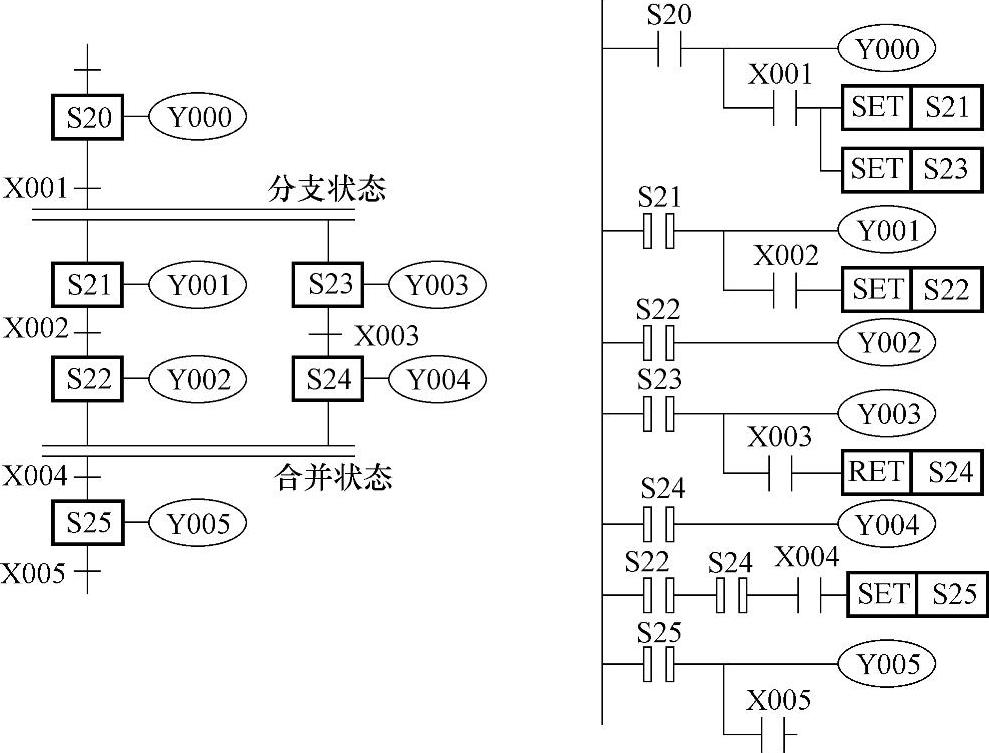
图5-16 并行性分支与汇合状态转移图和步进梯形图
图5-17以按钮式人行横道线为例,说明了并行分支与汇合的流程。

图5-17 按钮式人行横道线示意图
PLC从STOP向RUN变换时,初始状态S0动作,通常车道信号灯为绿,而人行横道信号灯为红。按下人行横道按钮X000或X001,则状态S21对应的车道信号灯为绿;状态S30中的人行横道信号已经为红色,此时状态无变化。30s后,车道信号为黄灯,再过10s车道信号变为红灯。此后,定时器T2(5s)启动,5s后人行横道变为绿灯。15s后,人行横道绿灯开始闪烁(S32=暗,S33=亮)。闪烁中时S32、S33反复动作,计数器C0(设定值为5次)触点一接通,动作状态向S34转移,人行横道变为红灯,5s后返回初始状态。在动作过程中,既使按动人行横道按钮X000、X001也无效。其程序如图5-18所示。

图5-18 按钮式人行横道线状态图
4.跳转和重复的处理
状态转移图除上述的几种类型外,还有其他非连续的状态转移类型。
(1)跳步
在生产过程中,有时要求在一定条件下停止执行某些原定动作,可用图5-19a所示的跳步序列。这是一种特殊的选择序列,当步1为活步时,若转换条件f=1、b=0,则步2、3不被激活而直接转入步4。
(2)重复
在一定条件下,生产过程需重复执行某几个工步的动作,可按图5-19b绘制功能图。它也是特殊的选择序列,当步4为活步时,若转换条件e=0而h=1,则序列返回到步3,重复执行步3、4,直到转换条件e=1时才转入步7。
(3)循环
在序列结束后,用重复的办法直接返回到初始步,于是就形成了系统的循环,如图5-19c所示。
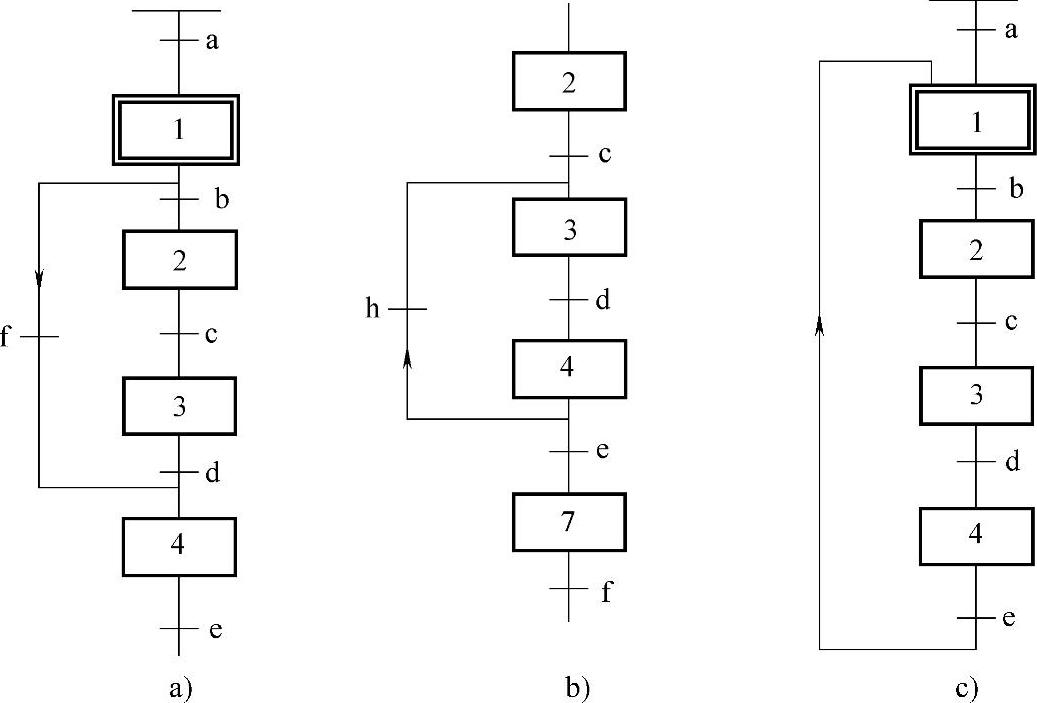
图5-19 跳步、重复和循环
a)跳步 b)重复 c)循环
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。