



三相交流异步电动机起动时电流较大,一般是额定电流的5~7倍。故对于功率较大的电动机,应采用减压起动方式。 /△减压起动是常用的方法之一。
/△减压起动是常用的方法之一。
起动时,定子绕组首先接成星形,待转速上升到接近额定转速时,再将定子绕组的接线换成三角形联结,电动机便进入全电压正常运行状态。图4-111所示为由继电器-接触器实现的 /△减压起动控制电路。
/△减压起动控制电路。
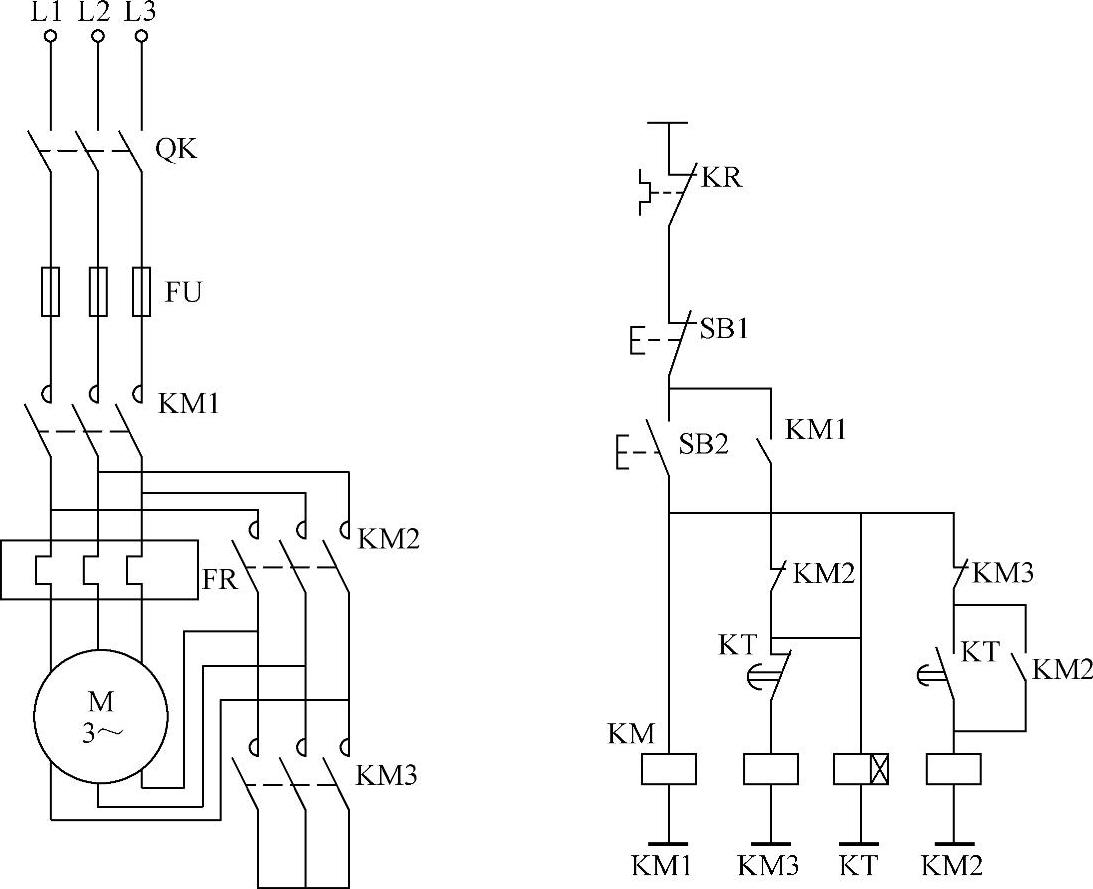
图4-111 继电器-接触器实现的 /△减压起动控制电路
/△减压起动控制电路
根据起动过程中的时间变化,利用时间继电器来控制 /△的换接。由图4-111可知,工作时,首先合上刀开关QK。当接触器KM1及KM3接通时,电动机
/△的换接。由图4-111可知,工作时,首先合上刀开关QK。当接触器KM1及KM3接通时,电动机 形起动。当接触器KM1及KM2接通时,电动机△形起动。
形起动。当接触器KM1及KM2接通时,电动机△形起动。
线路中KM2和KM3的动断触点构成电气互锁,保证电动机绕组只能接成一种形式,即 形或△形,以防止同时连接成
形或△形,以防止同时连接成 形及△形而造成电源短路。
形及△形而造成电源短路。
1.I/O分配
完成起动功能所需的硬件及I/O端口分配如图4-112所示。由图可见,SB1为停止按钮,SB2为起动按钮,KR为热继电器的动合触点,KM1为主电源接触器,KM2为△形起动接触器,KM3为 形起动接触器。
形起动接触器。
2.程序设计(https://www.xing528.com)
利用基本指令按照继电器接触器的控制功能用相应的编程要素编写程序,可编程控制的梯形图及指令表如图4-113所示。
工作过程分析如下:按下启动按钮SB2时,输入继电器X000的常开触点闭合,并通过主控触点(M100常开触点)自锁,输出继电器Y001接通,接触器KM3得电吸合,接着Y000接通,接触器KM1得电吸合,电动机在 形接线方式下启动;同时定时器T0开始计时,延时8s后T0动作,使Y001断开,Y001断开后,KM3失电,互锁解除,使输出继电器Y002接通,接触器KM2得电,电动机在△形接线方式下运行。若要使电动机停止,按下SB1按钮或过载保护(FR)动作,不论电动机是启动或运行情况下都可使主控接点断开,电动机停止运行。
形接线方式下启动;同时定时器T0开始计时,延时8s后T0动作,使Y001断开,Y001断开后,KM3失电,互锁解除,使输出继电器Y002接通,接触器KM2得电,电动机在△形接线方式下运行。若要使电动机停止,按下SB1按钮或过载保护(FR)动作,不论电动机是启动或运行情况下都可使主控接点断开,电动机停止运行。
在程序中与继电器-接触器系统不同的是:继电器-接触器在星形接法到三角形接法切换是由时间继电器来实现的,而在PLC系统中,虽然星形接法到三角形接法切换也是由时间继电器来实现的,但它在硬件连接中并没有时间继电器,时间继电器的功能是由软件来实现的,程序中选用了定时器T0。这样用软件实现硬件的功能提高了系统的可靠性,缩短了硬件安装、调试时间。

图4-112 完成启动功能所需的硬件及输入/输出端口分配图

图4-113  /△起动控制的梯形图及指令表
/△起动控制的梯形图及指令表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。